
- 为方便同步action机制的三个cb回调,建议使用三个参数的SimpleActionClient构造版本,并且spin_thread = false。这样还可以少创建一个线程。
- SimpleActionClient任一时刻最多设置一个目标。
- gh_.reset()、gh_.cancel()主要区别:cancel()会触发action相关逻辑,使得caller收到逻辑中的回调,像done_cb。
- 一次action涉及到5个话题。话题名称由两部分组成,第一部分node名称,第二部分那5个短名称,像/launcher/result。对于发生在每个node内的action实例,它们共用这5个名称。
- 用waitForResult进行同步时,不要让调用waitForResult的线程和处理SimpleActionClient中CallbackQueue的是同一个线程。
一、actionlib::SimpleActionClient
为简化action机制client端编程,ros提供了actionlib::ActionClient、actionlib::ClientGoalHandle,但开发者直接使用它们还是烦锁,于是在这之上再提供SimpleActionClient,ActionClient、ClientGoalHandle是SimpleActionClient的两个成员变量。
template<class ActionSpec> class SimpleActionClient { typedef ClientGoalHandle<ActionSpec> GoalHandleT; private: typedef ActionClient<ActionSpec> ActionClientT; // 一个GoalHandleT对应一个目标。一旦设置另一个目标,会先销毁原先目标。 GoalHandleT gh_; boost::scoped_ptr<ActionClientT> ac_; };
1.1、构造ActionClient
typedef actionlib::SimpleActionClient<move_base_msgs::MoveBaseAction> MoveBaseClient;
ActionClient是个模板类,构造时须要提供模板类型ActionSpec,像导航节点MoveBase中的move_base_msgs::MoveBaseAction。
// 个人建议简化为SimpleActionClient(const std::string & name), spin_thread固定是true。 // 使用场景:caller希望由SimpleActionClient提供CallbackQueue,三个cb在spin_thread的上下文执行。 SimpleActionClient(const std::string & name, bool spin_thread = true) : cur_simple_state_(SimpleGoalState::PENDING) { initSimpleClient(nh_, name, spin_thread); } // 个人建议简化为SimpleActionClient(ros::NodeHandle& n, const std::string& name), spin_thread固定是false。 // 使用场景:caller自已提供CallbackQueue,三个cb在自已能方便同步的线程上下文执行,像MainThread。 SimpleActionClient(ros::NodeHandle & n, const std::string & name, bool spin_thread = true) : cur_simple_state_(SimpleGoalState::PENDING) { initSimpleClient(n, name, spin_thread); }
SimpleActionClient提供了两种构造函数,个人认为有点搞复杂了。可以把caller使用SimpleActionClient分为两种场景。
- 第一个构造函数,spin_thread = true。使用场景:caller希望由SimpleActionClient提供CallbackQueue,三个cb在spin_thread的上下文执行。
- 第二个构造函数,spin_thread = false。使用场景:caller自已提供CallbackQueue,三个cb在自已能方便同步的线程上下文执行,像MainThread。
不建议其它的构造函数、参数组合,像使用第一个构造函数,spin_thread却置了false。不论哪种构造函数,都调用initSimpleClient。
template<class ActionSpec> void SimpleActionClient<ActionSpec>::initSimpleClient(ros::NodeHandle & n, const std::string & name, bool spin_thread) { if (spin_thread) { ROS_DEBUG_NAMED("actionlib", "Spinning up a thread for the SimpleActionClient"); need_to_terminate_ = false; // spin_thread_ = new boost::thread(boost::bind(&SimpleActionClient<ActionSpec>::spinThread, this)); spin_thread_ = new net::tworker(boost::bind(&SimpleActionClient<ActionSpec>::spinThread, this), NULL, NULL, NULL, "ActionClientSpinThread"); ac_.reset(new ActionClientT(n, name, &callback_queue)); } else { spin_thread_ = NULL; ac_.reset(new ActionClientT(n, name, n.getCallbackQueue())); } }
ac_类型是ActionClient,在概造ActionClient时,会订阅action机制的三种话题:status、feedback和result,同时发布两种话题:goal、cancel。它们的回调便是三种订阅话题对应的三个cb,它们在ActionClient第三个参数CallbackQueue的上下文执行。
1.2、设置目标
template<class ActionSpec> void SimpleActionClient<ActionSpec>::sendGoal(const Goal & goal, SimpleDoneCallback done_cb, SimpleActiveCallback active_cb, SimpleFeedbackCallback feedback_cb) { // Reset the old GoalHandle, so that our callbacks won't get called anymore gh_.reset(); // Store all the callbacks done_cb_ = done_cb; active_cb_ = active_cb; feedback_cb_ = feedback_cb; cur_simple_state_ = SimpleGoalState::PENDING; // Send the goal to the ActionServer gh_ = ac_->sendGoal(goal, boost::bind(&SimpleActionClientT::handleTransition, this, _1), boost::bind(&SimpleActionClientT::handleFeedback, this, _1, _2)); }
可认为gh_对应一个目标,sendGoal首先复位它,意味着SimpleActionClient任一时刻最多设置一个目标。注意gb_.reset()不会触发done_cb。
1.3、取消目标
template<class ActionSpec> void SimpleActionClient<ActionSpec>::cancelGoal() { if (gh_.isExpired()) { ROS_ERROR_NAMED("actionlib", "Trying to cancelGoal() when no goal is running. You are incorrectly using SimpleActionClient"); } gh_.cancel(); }
和gh_.reset()一样,gh_.cancel()也会de-active掉gh_,但它会触发action相关逻辑,便得caller收到逻辑中的回调,像done_cb。
1.4、销毁SimpleActionClient
SimpleActionClient<ActionSpec>::~SimpleActionClient() { if (spin_thread_) { { boost::mutex::scoped_lock terminate_lock(terminate_mutex_); need_to_terminate_ = true; } // spin_thread_->join(); delete spin_thread_; } gh_.reset(); ac_.reset(); }
1)销毁spin_thread_。2)复位目标。3)销毁ac_。
二、话题
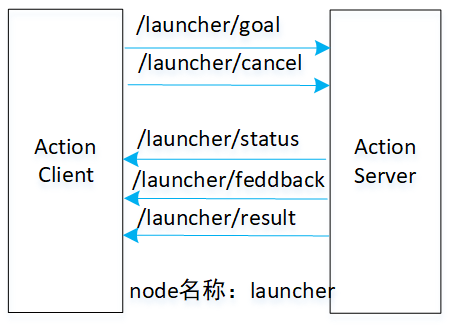
图1显示了一次action会涉及到的5个话题。action话题名称由两部分组成,第一部分node名称,第二部分那5个短名称。对于发生在每个node内的action实例,它们共用这个5个名称。
- goal:发布任务目标。
- cancel:请求取消任务。
- status:通知client当前的状态。
- feedback:周期反馈任务运行的监控数据。
- result:此次任务处理结束,向Client发送任务的执行结果,只发布一次。
以result为例,看大概流程。server指actionlib::ActionServer<ActionSpec>,client指actionlib::ActionClient<ActionSpec>
- [server]初始化时,advertise“result”话题,归属对象是result_pub_。
- [client]初始化时,订阅“result”话题,收到该话题后,指定处理函数是ActionClientT::resultCb。
- [server]上层调用结束此次action的成员函数,包括setCanceled、setRejected、setAborted、setSucceeded,它们都会调用ActionServer<ActionSpec>::publishResult,后者执行的一个操作是result_pub_.publish(ar),即通过result_pub_发布一个“result”消息。
- [client]收到一个“result”消息,调用ActionClientT::resultCb进行处理。resultCb一个任务是要调用app在sendGoal时调置的done_cb,即图2中的done_cb_。
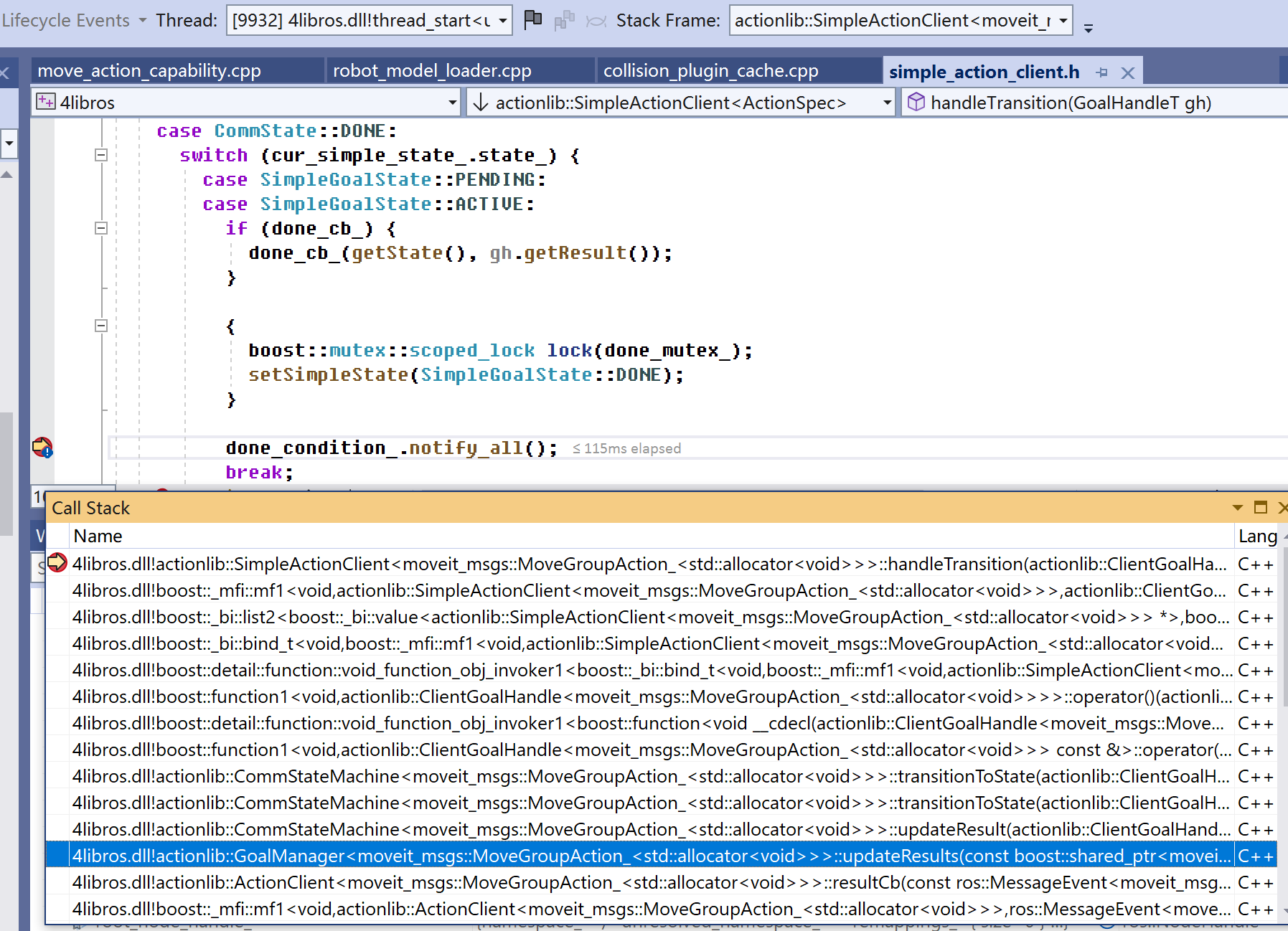
图2显示了client收到result话题时,回调resultCb进行处理,后者会调用handleTransition。done_cb_是app在sendGoal时调置的done_cb。接下的进入SimpleGoalState::DONE,以及让done_condition_有信号,会让需要同步等待action完成的场景时,可以退出waitForResult,详细见“三、SimpleActionClient<ActionSpec>::waitForResult“。
handleTransition不仅处理收到result话题,也处理status。但feedback时较简单,不会改变client状态,不须要执行handleTransition。
三、SimpleActionClient<ActionSpec>::waitForResult
导航时,client向server发送一个目标点后,就不管server啥时处理完这个任务。但在一些场景,像moveit中的plan、execute。execute只能在plan结束后才能执行,而且在plan和execute中间,程序一般不允许做其它事,这时就要同步执行plan这个action。actionlib为方便处理同步场景,提供了waitForResult函数。
参数timeout指示等待溢出时间。值是0时,表示死等,直到cur_simple_state_进入SimpleGoalState::DONE状态。
template<class ActionSpec>
bool SimpleActionClient<ActionSpec>::waitForResult(const ros::Duration & timeout)
{
...
while (nh_.ok()) {
...
if (cur_simple_state_ == SimpleGoalState::DONE) {
break;若是死等,是在这个入口退出while循环,见图2,它在把done_condition_置为有信号前,会先把cur_simple_state_置为SimpleGoalState::DONE。
} ... done_condition_.timed_wait(lock, boost::posix_time::milliseconds(static_cast<int64_t>(time_left.toSec() * 1000.0f)));
done_condition_有信号,或wait够了time_left秒,timed_wait就会结束。
} return cur_simple_state_ == SimpleGoalState::DONE; }
调用这函数时要注意:不要让调用waitForResult的线程和处理SimpleActionClient中CallbackQueue的是同一个线程。假设它们都在main thread线程,让看下面这个流程。
- [client的main thread]向server发送完goal后,调用waitForResult等待任务结束。
- [server]任务执行结束,发出result话题。
- [client的main thread]阻塞在waitForResult,不可能去查询SimpleActionClient的CallbackQueue,导致无法回调resultCb,也就无法使得cur_simple_state_进入SimpleGoalState::DONE,程序死锁。
正是这原因,编写moveit::planning_interface::MoveGroupInterface时,往往用AsyncSpinner,把它的CallbackQueue传给SimpleActionClient,从而让waitForResult和SimpleActionClient的CallbackQueue,是在两个线程。