
参考文章:[无处不在的小土]dwa_local_planner[1]
一、DWAPlannerROS::computeVelocityCommands
move_bae通过接口computeVelocityCommands进行本地路径规划,下面代码片段是DWAPlannerROS的实现。它有一个参数cmd_vel,这是一个输出参数,用于输出本地规划器计算的机器人控制指令。
bool DWAPlannerROS::computeVelocityCommands(geometry_msgs::Twist& cmd_vel) {
// dispatches to either dwa sampling control or stop and rotate control,
// depending on whether we have been close enough to goal
if ( ! costmap_ros_->getRobotPose(current_pose_)) {
ROS_ERROR("Could not get robot pose");
return false;
}在函数一开始先通过代价地图对象获取机器人的位姿。DWAPlannerROS运行在本地代价地图,它的全局坐标系是odom,current_pose_就是base_footprint-->odom的tf。
std::vector<geometry_msgs::PoseStamped> transformed_plan;
if ( ! planner_util_.getLocalPlan(current_pose_, transformed_plan)) {
ROS_ERROR("Could not get local plan");
return false;
}然后通过planner_util_对象的getLocalPlan接口,在全局轨迹中截取从当前位置到终点之间的路径,用本地变量transformed_plan记录。getLocalPlan除了截取剩余轨迹之外, 还会将全局轨迹点转换到代价地图的坐标系下。所以我猜这个本地变量的前缀transformed就是用来描述这一特性的。下文“二、LocalPlannerUtil::global_plan_、DWAPlanner::global_plan_”有叙述getLocalPlan。
//if the global plan passed in is empty... we won't do anything
if(transformed_plan.empty()) {
ROS_WARN_NAMED("dwa_local_planner", "Received an empty transformed plan.");
return false;
}如果剩余的路径是空的,就没有继续规划的必要了。
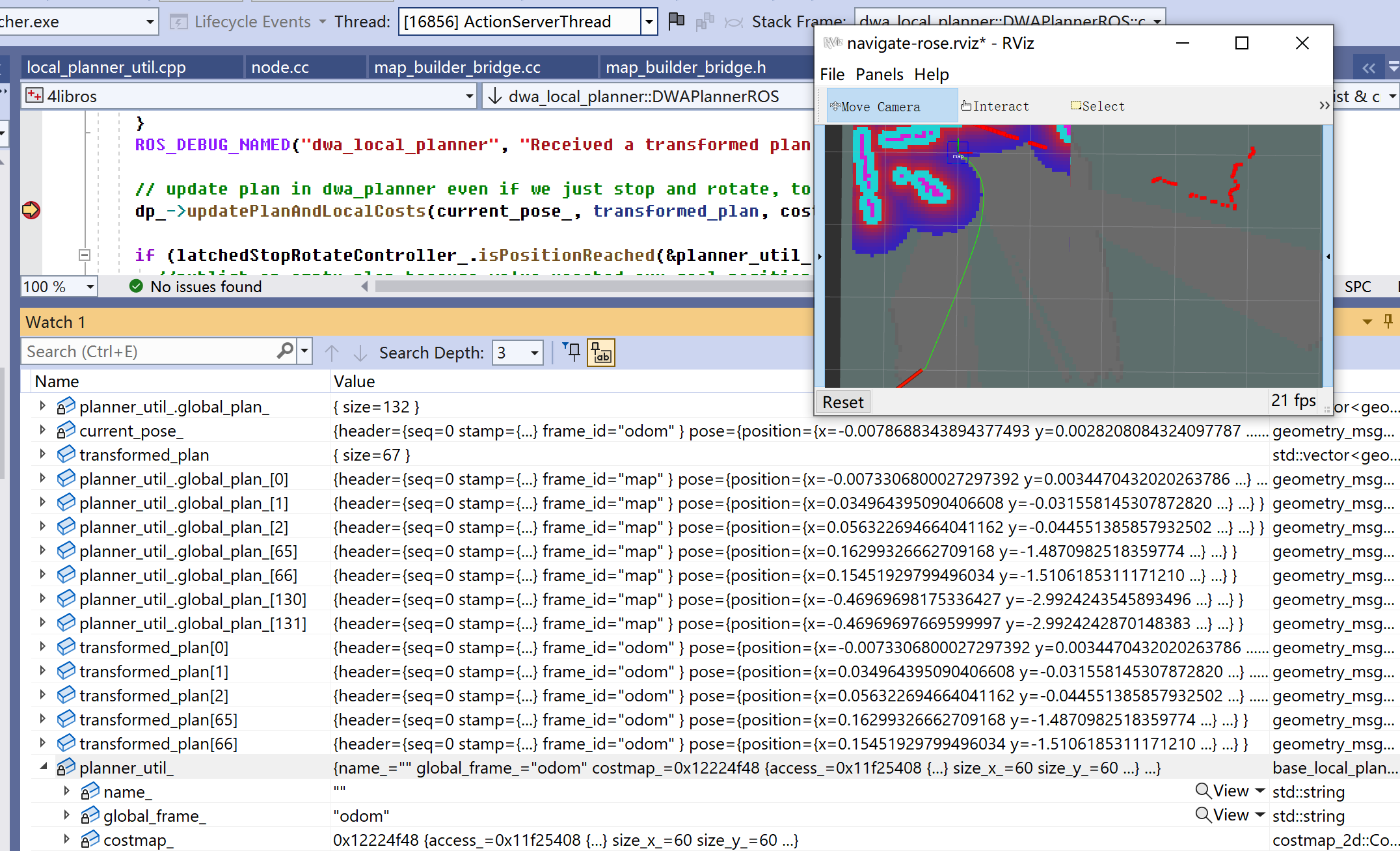
图1给出一个运行实例。rviz显示了目标设置在大概(-0.5, -3),绿色线条是全局规划器规划出的路径,存储在变量planner_util_.global_plan_。global_plan_坐标系是“map”,路径中有132个点。front基本等于map-->base_footprint的tf,即“零+current_pose_”,零是map和odom重合,current_pose_是base_footprint-->odom的tf;back基本等于目标点(-0.5, -3)。transformed_plan是从global_plan_生成的路径,由于map和odom重合,可认为就是原坐标值截取。本地代价地图的垂直半径1.5米,于是transformed_plan在距离1.5米处截止。图中列出了两个路径变量中的0、1、2、65、66,它们坐标值一样,但所属坐标系不一样,原因是上面所说的“getLocalPlan除了截取剩余轨迹之外, 还会将全局轨迹点转换到代价地图的坐标系下”。
ROS_DEBUG_NAMED("dwa_local_planner", "Received a transformed plan with %zu points.", transformed_plan.size());
// update plan in dwa_planner even if we just stop and rotate, to allow checkTrajectory
dp_->updatePlanAndLocalCosts(current_pose_, transformed_plan, costmap_ros_->getRobotFootprint());更新规划器的轨迹和本地代价。
if (latchedStopRotateController_.isPositionReached(&planner_util_, current_pose_)) {
//publish an empty plan because we've reached our goal position
std::vector<geometry_msgs::PoseStamped> local_plan;
std::vector<geometry_msgs::PoseStamped> transformed_plan;
publishGlobalPlan(transformed_plan);
publishLocalPlan(local_plan);
base_local_planner::LocalPlannerLimits limits = planner_util_.getCurrentLimits();
return latchedStopRotateController_.computeVelocityCommandsStopRotate(
cmd_vel,
limits.getAccLimits(),
dp_->getSimPeriod(),
&planner_util_,
odom_helper_,
current_pose_,
boost::bind(&DWAPlanner::checkTrajectory, dp_, _1, _2, _3));然后通过辅助对象latchedStopRotateController_判定是否到达了终点。 这个辅助对象是包base_local_planner中定义的辅助类LatchedStopRotateController。 如果我们到达了终点,就发布空路径,同时通过辅助对象控制机器人停下来。
} else {
bool isOk = dwaComputeVelocityCommands(current_pose_, cmd_vel);
if (isOk) {
publishGlobalPlan(transformed_plan);
} else {
ROS_WARN_NAMED("dwa_local_planner", "DWA planner failed to produce path.");
std::vector<geometry_msgs::PoseStamped> empty_plan;
publishGlobalPlan(empty_plan);
}
return isOk;
}
}没有到达目标位置,我们就通过成员函数dwaComputeVelocityCommands计算速度控制指令,并发布路径。
二、LocalPlannerUtil::global_plan_、DWAPlanner::global_plan_
- LocalPlannerUtil::global_plan_。makePlan规划出的全局路径,路径点是/map坐标系。示例值见图1中的planner_util_.global_plan_,有132个路径点。
- DWAPlanner::global_plan_。根据本地代价地图从LocalPlannerUtil::global_plan_截取出的一段路径,并把路径点转换到/odom坐标系。示例值见图1中的transformed_plan,从132中截取了67个路径点。transformed_plan会原样赋值给DWAPlanner::global_plan_。
生成这两个路径的大致逻辑。
- (MoveBase::executeCycle)planThread线程规划出全局路径后,调用tc_->setPlan(*controller_plan_),tc_类型是DWAPlannerROS。
- (DWAPlannerROS::setPlan)把makePlan规划出的结果原样赋值给planner_util_.global_plan_。
- (DWAPlannerROS::computeVelocityCommands)调用planner_util_.getLocalPlan,后者通过调用transformGlobalPlan,根据本地代价地图,从全局路径planner_util_.getLocalPlan截取一段,并将路径点从/map坐标系转换到/odom坐标系,生成结果放在transformed_plan。
- (DWAPlannerROS::computeVelocityCommands)调用dp_->updatePlanAndLocalCosts(current_pose_, transformed_plan, ...),dp_类型是DWAPlanner。
- (DWAPlanner::updatePlanAndLocalCosts)把transformed_plan原样赋值给DWAPlanner::global_plan_。
2.1 transformGlobalPlan
根据本地代价地图,从全局路径global_plan截取一段,并将路径点从/map坐标系转换到/odom坐标系,生成结果放在transformed_plan。
- [IN]tf。用于获取坐标系变换tf。
- [IN]global_plan。makePlan生成的全局路径。
- [IN]global_pose。机器人在/odom坐标系下的当前位姿。即图1中的current_pose_。
- [IN]costmap。本地代价地图。
- [IN]global_frame。路径点要转换到的坐标系。示例“odom”。
- [OUT]transformed_plan。存储截取出的路径。
bool transformGlobalPlan( const tf2_ros::Buffer& tf, const std::vector<geometry_msgs::PoseStamped>& global_plan, const geometry_msgs::PoseStamped& global_pose, const costmap_2d::Costmap2D& costmap, const std::string& global_frame, std::vector<geometry_msgs::PoseStamped>& transformed_plan)
怎么判断路径点A是否要放入transformed_plan?——把机器人中心放到/map坐标系下,记为robot_pose。如果A和robot_pose之间路径小于1.5米(本地代价地图半径),则放入。
过程中路径点只是坐标系变换,不会发生插补。
在转换时,是不是已经走过的全局路径点,也会落在transformed_plan?——会。只要那些点和robot_pose距离小于1.5米。接下如果出现一次本地规划得不到轨迹,那MoveBase会调用makePlan,那些走过的全局路径点自然也没了。
参考
- [无处不在的小土]dwa_local_planner https://gaoyichao.com/Xiaotu/?book=turtlebot&title=dwa_local_planner