
参考文章:[无处不在的小土]base_local_planner[1]
计算速度分三个步骤,括号内是该步骤主要函数。
- (SimpleTrajectoryGenerator::initialise)枚举出所有候选速度。
- (SimpleTrajectoryGenerator::generateTrajectory)让机器人针对每个候选速度模拟运行,每次运行的结果存放在一个Trajectory类型的变量,这变量称为轨迹。N个候选速度生成了N个Trajectory。
- (SimpleScoredSamplingPlanner::scoreTrajectory)计算每个轨迹得分,得分最高的就是要返回给上层的速度。
一、SimpleTrajectoryGenerator::initialise
功能是枚举出所有候选速度。因为只处理2D,速度有三个分量,线速度中的x、y,角速度中的theta。三个分量互相独立,根据数学上排列公式,候选速度数=x分量候选数 * y分量候选数 * theta分量候选数。要计算一个分量的候选数,只须要三个参数:最小速度min、最大速度max、样本数num_samples。
class VelocityIterator { VelocityIterator(double min, double max, int num_samples): current_index(0) { if (min == max) { samples_.push_back(min); } else { num_samples = std::max(2, num_samples); // e.g. for 4 samples, split distance in 3 even parts double step_size = (max - min) / double(std::max(1, (num_samples - 1))); // we make sure to avoid rounding errors around min and max. double current; double next = min; for (int j = 0; j < num_samples - 1; ++j) { current = next; next += step_size; samples_.push_back(current); // if 0 is among samples, this is never true. Else it inserts a 0 between the positive and negative samples if ((current < 0) && (next > 0)) { // 如果候选值中有负到正的变化,而且没有0,强制把0加入候选。 samples_.push_back(0.0); } } samples_.push_back(max); } } }
经过上面计算,samples_就存储着num_samples个候选速度,这些速度平均分布在[min, max]区间。但有个例外,如果候选值中有负到正的变化,而且没有0,强制把0加入候选,这时samples_中就增加到num_samples + 1。速度是0时,意味着机器人在那分量上是静止,静止可能会是个常用值。接下让看会调用VelocityIterator的SimpleTrajectoryGenerator::initialise。
void SimpleTrajectoryGenerator::initialise( const Eigen::Vector3f& pos, const Eigen::Vector3f& vel, const Eigen::Vector3f& goal, base_local_planner::LocalPlannerLimits* limits, const Eigen::Vector3f& vsamples, bool discretize_by_time) {
initialise有6个参数,其中pos, vel和goal是三个输入参数,分别记录了机器人的当前位姿(odom坐标系)、当前速度和目标点。limits记录机器人的各种运动限制,vsamples则记录了在x、y方向和theta的num_samples,discretize_by_time则用于配置采样器是否需要在时间上进行离散化处理。
/* * We actually generate all velocity sample vectors here, from which to generate trajectories later on */ double max_vel_th = limits->max_vel_theta; double min_vel_th = -1.0 * max_vel_th; discretize_by_time_ = discretize_by_time; Eigen::Vector3f acc_lim = limits->getAccLimits(); pos_ = pos; vel_ = vel; limits_ = limits; next_sample_index_ = 0; sample_params_.clear(); double min_vel_x = limits->min_vel_x; double max_vel_x = limits->max_vel_x; double min_vel_y = limits->min_vel_y; double max_vel_y = limits->max_vel_y; // if sampling number is zero in any dimension, we don't generate samples generically if (vsamples[0] * vsamples[1] * vsamples[2] > 0) {
根据样本数量的限制,只要有一个维度的样本数量为0就不枚举候选速度。vsamples是个配置参数,DWAPlanner::reconfigure取出时会确保3个最小值是1。
//compute the feasible velocity space based on the rate at which we run Eigen::Vector3f max_vel = Eigen::Vector3f::Zero(); Eigen::Vector3f min_vel = Eigen::Vector3f::Zero(); if ( ! use_dwa_) {
// 省略use_dwa_为false时的分支,它与我们的DWA算法无关。
} else { // with dwa do not accelerate beyond the first step, we only sample within velocities we reach in sim_period max_vel[0] = std::min(max_vel_x, vel[0] + acc_lim[0] * sim_period_); max_vel[1] = std::min(max_vel_y, vel[1] + acc_lim[1] * sim_period_); max_vel[2] = std::min(max_vel_th, vel[2] + acc_lim[2] * sim_period_); min_vel[0] = std::max(min_vel_x, vel[0] - acc_lim[0] * sim_period_); min_vel[1] = std::max(min_vel_y, vel[1] - acc_lim[1] * sim_period_); min_vel[2] = std::max(min_vel_th, vel[2] - acc_lim[2] * sim_period_);
以计算max_vel[0]为例,分析当中逻辑。假设当前速度是vel[0],加速度acc_lim[0]是1.25,模拟运行时间sim_period_是0.2秒,按这加速度,0.2秒后机器人最快也只能到vel[0]+0.25,如果这值小于max_vel_x,应该取vel[0]+0.25。取最大值vel[0]+0.25不会减少候选速度数目,但满足了加速度不能超过acc_lim[0]这个限制。所以以上6条语句的作用:根据机器人当前的速度和加速度限制,计算机器人的速度区间。
} Eigen::Vector3f vel_samp = Eigen::Vector3f::Zero(); VelocityIterator x_it(min_vel[0], max_vel[0], vsamples[0]); VelocityIterator y_it(min_vel[1], max_vel[1], vsamples[1]); VelocityIterator th_it(min_vel[2], max_vel[2], vsamples[2]); for(; !x_it.isFinished(); x_it++) { vel_samp[0] = x_it.getVelocity(); for(; !y_it.isFinished(); y_it++) { vel_samp[1] = y_it.getVelocity(); for(; !th_it.isFinished(); th_it++) { vel_samp[2] = th_it.getVelocity(); sample_params_.push_back(vel_samp); } th_it.reset(); } y_it.reset(); } } }
根据三参数min、max、num_samples,枚举出所有候选速度,生成的速度保存在sample_params_。下面一个实例。
vsamples{20, 1, 20}、min_vel{-0.025, 0, -1}、max_vel{0.25, 0, 1}
==> sample_params_.size(): 21 * 1 * 21 = 441
------
sample_params_[0] -0.025000, 0, -1.000000
sample_params_[1] -0.025000, 0, -0.894736
sample_params_[2] -0.025000, 0, -0.789473
sample_params_[3] -0.025000, 0, -0.684210
sample_params_[4] -0.025000, 0, -0.578947
sample_params_[5] -0.025000, 0, -0.473684
sample_params_[6] -0.025000, 0, -0.368421
sample_params_[7] -0.025000, 0, -0.263157
sample_params_[8] -0.025000, 0, -0.157894
sample_params_[9] -0.025000, 0, -0.052631
sample_params_[10] -0.025000, 0, 0
sample_params_[11] -0.025000, 0, 0.052631
sample_params_[12] -0.025000, 0, 0.157894
sample_params_[13] -0.025000, 0, 0.263157
sample_params_[14] -0.025000, 0, 0.368421
sample_params_[15] -0.025000, 0, 0.473684
sample_params_[16] -0.025000, 0, 0.578947
sample_params_[17] -0.025000, 0, 0.684210
sample_params_[18] -0.025000, 0, 0.789473
sample_params_[19] -0.025000, 0, 0.894736
sample_params_[20] -0.025000, 0, 1.000000
sample_params_[21] -0.010526, 0, -1.000000
......
sample_params_[436] 0.249999, 0, 0.578947
sample_params_[437] 0.249999, 0, 0.684210
sample_params_[438] 0.249999, 0, 0.789473
sample_params_[439] 0.249999, 0, 0.894736
sample_params_[440] 0.249999, 0, 1.000000
以下是和计算候选速度相关的配置变量。
| vsamples[0] | __default__.vx_samples = 3。改用:20 |
| vsamples[1](注1) | __default__.vy_samples = 10。改用:0 |
| vsamples[2] | __default__.vtheta_samples = 20 |
| min_vel_x | __default__.min_vel_x = 0.0。改用:-0.025 |
| max_vel_x | __default__.max_vel_x = 0.55。改用:0.5 |
| min_vel_y | __default__.min_vel_y = -0.1。改用:0 |
| max_vel_y | __default__.max_vel_y = 0.1。改用:0 |
| max_vel_theta | __default__.max_vel_theta = 1.0 |
| acc_lim_x | __default__.acc_lim_x = 2.5。改用:1.25 |
| acc_lim_y | __default__.acc_lim_y = 2.5。改用:0 |
| acc_lim_theta | __default__.acc_lim_theta = 3.2。改用:5 |
| sim_period_ | 来自于参数“controller_frequency”,值是1/controller_frequency。controller_frequency默认值是20,但改为5,那sim_period就是0.2秒。move_base在用controller_frequency,executeCb中的每个时间片至少要执行1/controller_frequency秒。 |
注1。除非像万向轮,很多底盘不能做到转弯时只改y不改x,因此涉及到y的就设置为0。相关参数:vy_samples、min_vel_y、max_vel_y、acc_lim_y。
二、SimpleTrajectoryGenerator::generateTrajectory
让机器人针对某个候选速度模拟运行,运行的结果存放在一个Trajectory类型的变量,这变量称为轨迹。它的基本思路:给定一个时间段sim_time_(1.7秒),让机器人按着候选速度运行1.7秒,这时会形成一条路径,在路径中等间隔取num_steps个坐标点,就可由候选速度和num_steps个坐标点组成轨迹。
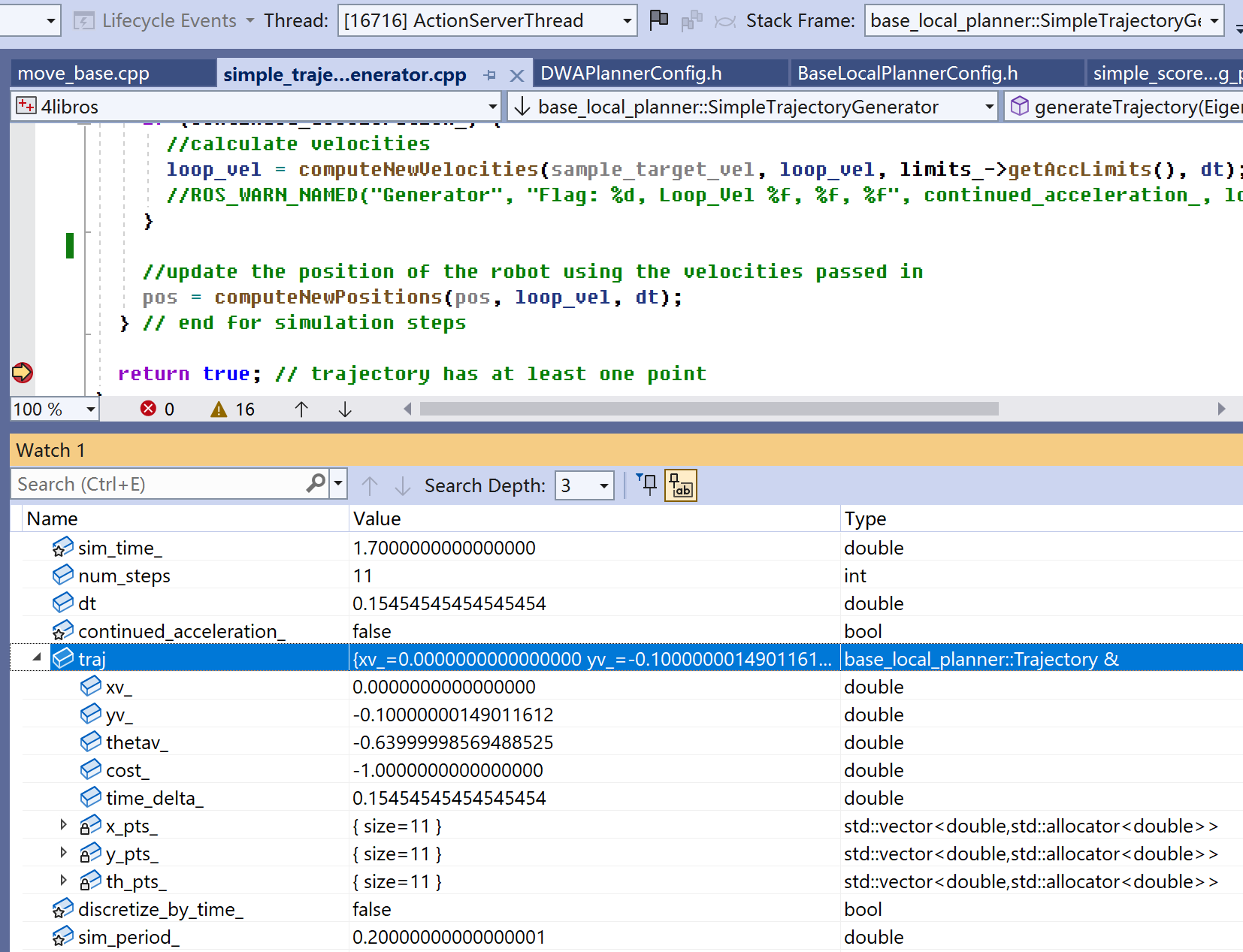
图1显示了一次generateTrajectory运行实例。对生成的traj,xv_、yv_、thetav_是候选速度。time_delta_是时间粒度,它和num_steps满足“time_delta_ = sim_time_ / num_steps”。x_pts_、y_pts_、th_pts_是按候选速度运行、运行路径中等间隔取的num_steps个坐标点,是odom坐标系下的坐标点,不是针对初始位姿的偏移。它们的size()相等,且都等于num_steps。(x_pts_[0], y_pts_[0], th_pts_[0])值是参数pos,即机器人当前位姿,back则是sim_time_时长后估计到达的坐标。当中只有cost_没被赋上最终值,只给了初始值-1。
计算中使用的时长变量是sim_time_,而不是SimpleTrajectoryGenerator::initialise中的sim_period_。
bool SimpleTrajectoryGenerator::generateTrajectory(
Eigen::Vector3f pos,
Eigen::Vector3f vel,
Eigen::Vector3f sample_target_vel,
base_local_planner::Trajectory& traj) {
generateTrajectory有四个参数,其中pos和vel分别是机器人目前的位姿和速度,sample_target_vel是某个候选速度,而traj是一个输出参数,将记录生成的轨迹
double vmag = hypot(sample_target_vel[0], sample_target_vel[1]); double eps = 1e-4;
通过C语言的数学库函数hypot求取x和y的合速度值。hypot本身用于求取直角三角形的斜边长。局部变量eps是一个有限小量,用于对机器人的速度限幅作出适当的膨胀。
traj.cost_ = -1.0; // placed here in case we return early //trajectory might be reused so we'll make sure to reset it traj.resetPoints();
首先清空轨迹traj。
// make sure that the robot would at least be moving with one of // the required minimum velocities for translation and rotation (if set) if ((limits_->min_vel_trans >= 0 && vmag + eps < limits_->min_vel_trans) && (limits_->min_vel_theta >= 0 && fabs(sample_target_vel[2]) + eps < limits_->min_vel_theta)) { return false; } // make sure we do not exceed max diagonal (x+y) translational velocity (if set) if (limits_->max_vel_trans >=0 && vmag - eps > limits_->max_vel_trans) { return false; }
判定候选速度是否在膨胀之后的候选空间内,若不是则报错退出。
int num_steps; if (discretize_by_time_) { // discretize_by_time_默认是false,不进这个入口。 num_steps = ceil(sim_time_ / sim_granularity_); } else { //compute the number of steps we must take along this trajectory to be "safe" double sim_time_distance = vmag * sim_time_; // the distance the robot would travel in sim_time if it did not change velocity double sim_time_angle = fabs(sample_target_vel[2]) * sim_time_; // the angle the robot would rotate in sim_time num_steps = ceil(std::max(sim_time_distance / sim_granularity_, sim_time_angle / angular_sim_granularity_)); } if (num_steps == 0) { return false; }
根据仿真粒度计算仿真步数,即样本点数。如果速度量过小,在sim_time_的时间内不能产生超过仿真粒度的线位移或者角位移就报错退出。线位移、角度位移各自独立计算仿真步数,num_steps是它们的较大值。
//compute a timestep double dt = sim_time_ / num_steps; traj.time_delta_ = dt; Eigen::Vector3f loop_vel; if (continued_acceleration_) { // continued_acceleration_ = !use_dwa_,意味着continued_acceleration_总是false,不进这个入口。 // assuming the velocity of the first cycle is the one we want to store in the trajectory object loop_vel = computeNewVelocities(sample_target_vel, vel, limits_->getAccLimits(), dt); traj.xv_ = loop_vel[0]; traj.yv_ = loop_vel[1]; traj.thetav_ = loop_vel[2]; } else { // assuming sample_vel is our target velocity within acc limits for one timestep loop_vel = sample_target_vel; traj.xv_ = sample_target_vel[0]; traj.yv_ = sample_target_vel[1]; traj.thetav_ = sample_target_vel[2]; }
计算仿真步长。continued_acceleration_ = !use_dwa_,意味着continued_acceleration_总是false,即不会考虑加速度,速度也就等于候选速度。
//simulate the trajectory and check for collisions, updating costs along the way for (int i = 0; i < num_steps; ++i) { //add the point to the trajectory so we can draw it later if we want traj.addPoint(pos[0], pos[1], pos[2]); if (continued_acceleration_) { //calculate velocities loop_vel = computeNewVelocities(sample_target_vel, loop_vel, limits_->getAccLimits(), dt); //ROS_WARN_NAMED("Generator", "Flag: %d, Loop_Vel %f, %f, %f", continued_acceleration_, loop_vel[0], loop_vel[1], loop_vel[2]); } //update the position of the robot using the velocities passed in pos = computeNewPositions(pos, loop_vel, dt); } // end for simulation steps return true; // trajectory has at least one point
在一个for循环中,依次计算各个仿真步的坐标点,并将之添加到输出参数traj中。computeNewPositions功能:从当前坐标pos开始,经过loop_vel*dt位移后,算出会到达的新坐标。关于computeNewPositions中使用的方法,参考:https://github.com/ydsf16/aruco_ekf_slam/blob/master/ArUco-EKF%20SLAM.pdf。
}
以下是和计算候选速度相关的配置变量。
| sim_time_ | __default__.sim_time = 1.7 |
| sim_granularity_ | __default__.sim_granularity = 0.025 |
| angular_sim_granularity_ | __default__.angular_sim_granularity = 0.1 |
三、SimpleScoredSamplingPlanner::scoreTrajectory
功能是计算某个轨迹得分。计算轨迹得分基本思路:把评价轨迹的标准细分为七条,七条之和就是该轨迹得分。每一条称为准则,计算得分过程就是依次计算每一条准则上的得分,然后相加。这些准则对象虽然具有不同数据类型,但是都继承自同一个基类TrajectoryCostFunction。
class TrajectoryCostFunction { public: /** * * General updating of context values if required. * Subclasses may overwrite. Return false in case there is any error. */ virtual bool prepare() = 0; /** * return a score for trajectory traj */ virtual double scoreTrajectory(Trajectory &traj) = 0; double getScale() { return scale_; } void setScale(double scale) { scale_ = scale; } virtual ~TrajectoryCostFunction() {} protected: TrajectoryCostFunction(double scale = 1.0): scale_(scale) {} private: double scale_; };
这里定义了两个纯虚函数prepare和scoreTrajectory,分别用于更新准则的上下文和对候选轨迹打分。除此之外,还定义了一个私有成员scale_,用于指示该准则得分权重,它不是个虚函数,如果不给专门设置,权重默认1.0。
| 准则(Y:使用) | 类型 | 说明 | 最大值 | scale |
| oscillation_costs_ | OscillationCostFunction | (摆动打分)尽量降低机器人在原地摆动的情况 | 0 | 1(默认值) |
| obstacle_costs_(Y) | ObstacleCostFunction | (避障打分)防止机器人撞到障碍物上 | 379(253*3/2) | [0.05]__default__.occdist_scale = 0.01 |
| goal_front_costs_ | MapGridCostFunction | (前向点指向目标打分)尽可能的让机器人朝向局部的nose goal | [1.2]0.05(resolution) * 0.8(goal_distance_bias) = 0.04 | |
| alignment_costs_ | MapGridCostFunction | (对齐打分)尽可能的让机器人保持在nose path上 | [1.7]0.05(resolution) * 0.6(path_distance_bias) = 0.03 | |
| path_costs_(Y) | MapGridCostFunction | (路径跟随打分)使机器人尽可能的贴近全局轨迹 | [1.7]0.03(等于alignment_costs_) | |
| goal_costs_(Y) | MapGridCostFunction | (指向目标打分)更倾向于选择接近目标点的轨迹 | [4.0]0.04(等于goal_front_costs_) | |
| twirling_costs_ | TwirlingCostFunction | 尽量不让机器人原地打转 | __default__.twirling_scale = 0.0 |
上表是ros源码出现的7条准则,rose_ros只用了当中三种:ObstacleCost、path_costs、goal_costs。接下分析scoreTrajectory。
double SimpleScoredSamplingPlanner::scoreTrajectory(Trajectory& traj, double best_traj_cost) {
scoreTrajectory有2个参数,都是输入参数,traj是上面generateTrajectory算出的某个轨迹,best_traj_cost指示之前已比较出的最优轨迹得分。对于得分和轨迹优劣的对应关系,1)得分>=0时,得分越低轨迹越优。2)是负数,意味着该轨迹是不合理的,表示的是错误代码,而不是得分。
double traj_cost = 0; int gen_id = 0; for(std::vector<TrajectoryCostFunction*>::iterator score_function = critics_.begin(); score_function != critics_.end(); ++score_function) { TrajectoryCostFunction* score_function_p = *score_function; if (score_function_p->getScale() == 0) { continue; } double cost = score_function_p->scoreTrajectory(traj);
准则对象虽然具有不同的数据类型,但是都继承自同一个基类TrajectoryCostFunction,调用虚函数scoreTrajectory得到轨迹在该准则下得分。
if (cost < 0) { traj_cost = cost; break; } if (cost != 0) { cost *= score_function_p->getScale(); } traj_cost += cost;
在累加到总得分时,每条准则有着不同权重,虚函数getScale表示该准则的权重。
if (best_traj_cost > 0) { // since we keep adding positives, once we are worse than the best, we will stay worse if (traj_cost > best_traj_cost) { break; }
目前累加的得分已超过最优得分,可确定此条轨迹不会是最优轨迹了。免得浪费cpu,退出计算此轨迹。
} gen_id ++; } return traj_cost; }
3.1 TwirlingCostFunction
TwirlingCostFunction可说是最简单的准则类。接口prepare总是返回true,scoreTrajectory总是以轨迹的角速度值作为轨迹的代价。
class TwirlingCostFunction: public base_local_planner::TrajectoryCostFunction { public: TwirlingCostFunction() {} ~TwirlingCostFunction() {} // add cost for making the robot spin double TwirlingCostFunction::scoreTrajectory(Trajectory &traj) { return fabs(traj.thetav_); } bool prepare() {return true;}; };
参考
- [无处不在的小土]base_local_planner https://gaoyichao.com/Xiaotu/?book=turtlebot&title=base_local_planner