
- 当目标是global_plan中goal点时(is_local_goal_function_=true)。要计算点A到零线点goal的距离,就是从零线点开始,依次画两条直线。第一条垂直,到达A所在的y行,假设那个点是b;第二条水平,由b到A,这两条线经过的栅格数就是距离。于是理论上最大距离就是“size_x_ + size_y_”,对60x60代价地图,最大值是120。所在点直观看就是对角线上的两个点,实际中(local_goal_x, local_goal_y)不大可能恰好是(0, 0)或(59, 0),也就不大可能到最大值。
- 当目标是global_plan这条路径本身时(is_local_goal_function_=false)。要计算点A到零线global_plan的距离,就是在global_plan找出一个离A最近的路径点b,这个b往往就是从A点画一条水平线或垂线,这条线和global_plan交点就是b。由于零线global_plan是一条线,含有多个点,最大距离通常会比目标是Goal点时的小。
MapGridCostFunction的成员变量
- std::vector target_poses_。planner_util_.getLocalPlan算出的transformed,即局限在local_costmap代价地图内、并且odom坐标系下的global_path。
path_costs_,goal_costs,goal_front_costs_,alignment_costs_四条准则都是MapGridCostFunction类型,因此打分思路都一致,只是通过设置不同参数即可实现不同的打分方式。
| goal_front_costs_ | alignment_costs_ | path_costs_ | goal_costs_ | |
| 描述 | 尽可能的让机器人朝向局部的nose goal | 尽可能的让机器人保持在nose path上 | 使机器人尽可能的贴近全局轨迹 | 更倾向于选择接近目标点的轨迹 |
| aggregationType | Last(0) | Last(0) | Last(0) | Last(0) |
| xshift_ | 0.3(默认0.325) | 0.3(默认0.325) | 0 | 0 |
| yshift_ | 0 | 0 | 0 | 0 |
| is_local_goal_function_ | true | false | false | true |
| stop_on_failure_ | false | false | true | true |
让以aggregationType_都是Last,goal_front_costs_和alignment_costs_的xshift_是0.3,直观理解4条准则是如何计算cost。要注意,机器人中心在map坐标系下坐标不一定是(30, 30),往往是个比30小的值,像(28, 29)。
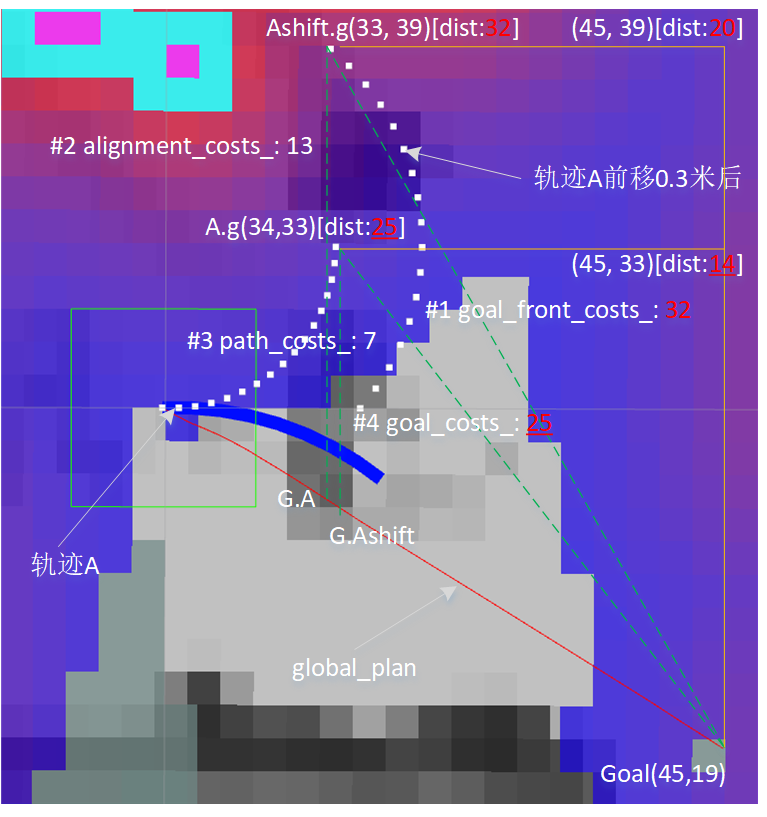
xshift_(0.3)。把轨迹A前移0.3米生成另一条轨迹,这两条轨迹有一样的路径点数目,对应的路径点有一样的th_pts_。轨迹A最后一个路径点A.g(34, 33),在新轨迹变成了Ashift.g(33, 39)。在一些设置中,global_plan的Goal点也要前移,变量forward_point_distance_指示前移距离,值等于xshift_。在那些场景,goal_front_costs_的目标点要换成那个前移后的Goal。
aggregationType_(Last)。值是Last时,轨迹中最后一个路径点到目标的距离就是最终cost。
is_local_goal_function_。用于决定目标是global_plan中的Goal点,还是global_plan这条路径本身。
- goal_front_costs_。使用前移后轨迹Ashift,目标是global_plan中的Goal点。AShift.g(33, 39)到Goal(45,19)距离将做为最终cost。如何计算这距离?直观上可这么算:从零线点Goal(45,19)开始,依次画两条直线。第一条垂直,到达AShift.g所在的y行(45, 39),这时距离是20;第二条水平,由(45,39)到AShift.g(33,39),距离12,这两距离和32就是这条准则算出的cost。
- alignment_costs_。使用前移后轨迹Ashift,目标是global_plan这条路径本身。AShift.g(33, 39)到global_plan这条线的距离将做为最终cost。如何计算这距离?在global_plan找出一个离AShift.g最近的路径点G.Ashift,然后计算AShift.g到G.Ashift距离。示例中,就是从Ashift.g画一条到global_plan垂线,交点是G.Ashift,之间距离是13。
- path_costs_。使用原轨迹A,目标是global_plan这条路径本身。A.g(34, 33)到global_plan这条线的距离将做为最终cost。类似alignment_costs_,在global_plan找出一个离A.g最近的路径点G.A,然后计算A.g到G.A距离。示例中,就是从A.g画一条到global_plan垂线,交点是G.A,之间距离是7。
- goal_costs_。使用原轨迹A,目标是global_plan中的Goal点。A.g(34, 33)到Goal(45,19)距离将做为最终cost。类似goal_front_costs_,从零线点Goal(45,19)开始,依次画两条直线。第一条垂直,到达A.g所在的y行(45, 33),这时距离是14;第二条水平,由(45,33)到A.g(34,33),距离11,这两距离和25就是这条准则算出的cost。
一、MapGridCostFunction::prepare
在每个findBestPath周期时,会对各个打分项进行prepare操作,其中oscillation_costs_和obstacle_costs_的prepare不执行具体动作,而和MapGridCostFunction有关的四个打分项在prepare中会对局部地图进行预计算,从而方便后边进行打分。
预计算的思想在于维护一个跟局部地图尺寸对应的MapGrid地图(MapGrid类型),该地图中的每个栅格为MapCell类型,该类型记录了该栅格距离目标点或距离路径的距离信息。在每次打分前,先利用局部路径(target_poses_)更新该地图信息,并根据is_local_goal_function参数决定记录距离目标点的距离信息还是距离路径的距离信息,这些信息在后面打分时可以直接使用。
bool MapGridCostFunction::prepare() { map_.resetPathDist();
复位整个MapGrid地图
if (is_local_goal_function_) { map_.setLocalGoal(*costmap_, target_poses_); } else { map_.setTargetCells(*costmap_, target_poses_); }
根据is_local_goal_function_,决定是采用setLocalGoal(...)还是setTargetCells(...)计算对应的预处理信息。
return true; }
对于setLocalGoal函数,是用来计算MapGrid地图中所有点到局部地图路径末端点的最短距离。在该函数中,首先对映射到局部地图中的路径进行栅格级的插补(MapGrid::adjustPlanResolution),从而使得整个路径是栅格连续的。然后,查找路径在局部地图中的最后一个点,并将MapGrid地图中的该点标记为已访问(标记为已访问的点可以进行最短路径计算),然后调用computeTargetDistance函数采用类似dijkstra算法的逐步探索的方式,计算出MapGrid地图中所有点(栅格级)相对于与标记点的最短距离。
对于setTargetCells函数,是用来计算轨迹MapGrid地图中所有点到局部地图路径的最短距离。与setLocalGoal函数的区别主要在于,首先将局部地图路径中所有的点标记为已访问,然后调用computeTargetDistance函数就会计算MapGrid地图中所有点到整个局部地图路径的最短距离,具体算法需要进一步了解。
因此,在经过预计算后,对于path_costs_和alignment_costs这两个考虑与路径距离的打分项,其内部的MapGrid地图中存储的是所有点到路径的最短距离;对于goal_costs_和goal_front_costs_这两个考虑与局部目标点距离的打分项,其内部的MapGrid地图中存储的是所有点到局部目标点的最短距离。
至此,完成了path,goal相关的打分项的预计算,下一步就是利用scoreTrajectory(Trajectory &traj)进行具体的打分。
二、MapGridCostFunction::scoreTrajectory
double MapGridCostFunction::scoreTrajectory(Trajectory &traj) {
double cost = 0.0;
if (aggregationType_ == Product) {
cost = 1.0;
}
double px, py, pth;
unsigned int cell_x, cell_y;
double grid_dist;
for (unsigned int i = 0; i < traj.getPointsSize(); ++i) {
traj.getPoint(i, px, py, pth);
// translate point forward if specified
if (xshift_ != 0.0) {
px = px + xshift_ * cos(pth);
py = py + xshift_ * sin(pth);
}
// translate point sideways if specified
if (yshift_ != 0.0) {
px = px + yshift_ * cos(pth + M_PI_2);
py = py + yshift_ * sin(pth + M_PI_2);
}
goal_front_costs_、alignment_costs_时,xshift_不是0。
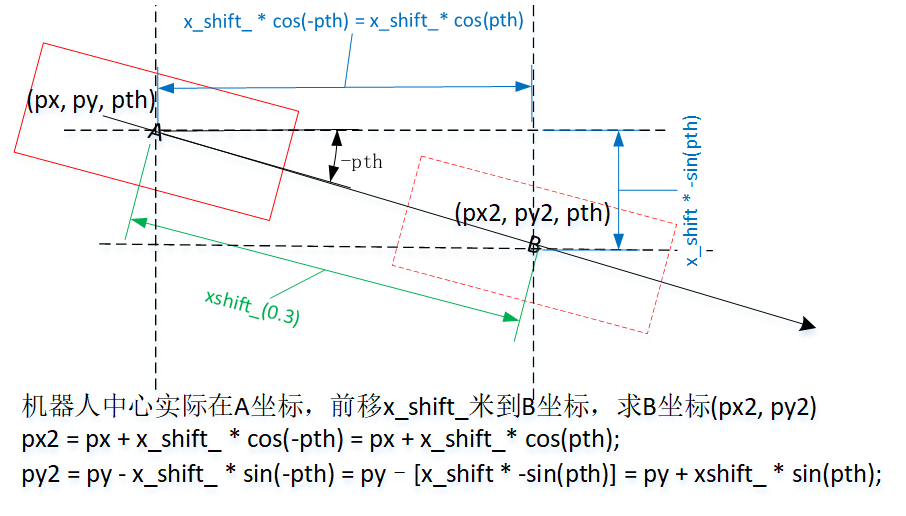
图2显示了当xshift_不是0时,新(px, py)的计算过程。
//we won't allow trajectories that go off the map... shouldn't happen that often anyways
if ( ! costmap_->worldToMap(px, py, cell_x, cell_y)) {
//we're off the map
ROS_WARN("Off Map %f, %f", px, py);
return -4.0;
}
grid_dist = getCellCosts(cell_x, cell_y);
//if a point on this trajectory has no clear path to the goal... it may be invalid
if (stop_on_failure_) {
if (grid_dist == map_.obstacleCosts()) {
return -3.0;
} else if (grid_dist == map_.unreachableCellCosts()) {
return -2.0;
}
}在MapGridCostFunction::scoreTrajectory函数中,依次获取路径中的各个点坐标,并尝试将坐标转为地图坐标,如果转化失败,则scoreTrajecotry函数直接返回-4。否则,从MapGrid地图中找到距离局部地图路径的距离,并将该距离(栅格级)值作为该点的得分。
另外,对于path_costs_和goal_costs_两个打分项的stop_on_failure参数为true,即如果轨迹中的某个点是障碍物或不可到达,则表示查找该点的得分失败,这会造成scoreTrajectory函数直接返回对应的负的得分。例如,如果轨迹中的某个点本身就是障碍物(在路径MapGrid中会有标记),则scoreTrajectory直接返回-3作为轨迹得分;如果轨迹中某个点不可达(在MapGrid地图中没有计算到),则scoreTrajectory直接返回-2作为轨迹得分。
对于goal_front_costs和alignment_costs_两个打分项对应的stop_on_failure参数为false,这是因为前向打分点有可能会出现计算距离出错的情况,例如超出地图范围,但由于前向打分点的打分失败不会带来危险,因此可以不立刻返回负得分。
switch( aggregationType_ ) { case Last: cost = grid_dist; break; case Sum: cost += grid_dist; break; case Product: if (cost > 0) { cost *= grid_dist; } break; }
轨迹所有点得分的汇总方式有Last、Sum、Product三种方式,默认为Last(且没有对应的配置参数,除非自己修改源码实现),即只考虑轨迹最后一个点的打分。
} return cost; }
三、MapGrid
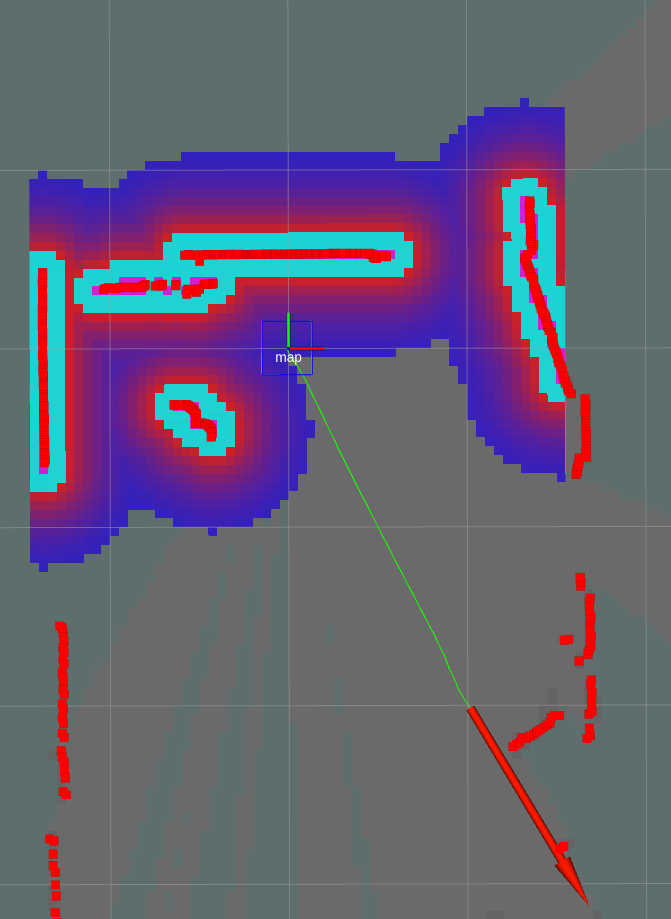
图3是示例,用户在距离机器人中心(1米, -2米)处设置导航goal,局部代价地图尺寸是(3米 x 3米)。为直观理解,以下会用这个示例。
3.1 MapGrid::setLocalGoal
void MapGrid::setLocalGoal(const costmap_2d::Costmap2D& costmap,
const std::vector<geometry_msgs::PoseStamped>& global_plan) {
sizeCheck(costmap.getSizeInCellsX(), costmap.getSizeInCellsY());map_当前尺寸和参数costmap要求的尺寸不一致时,sizeCheck会销毁旧的map_、生成新的。发生重建时,会初始化各MapCell的cx、cy,但不会把target_dist设为unreachableCellCosts,不知算不算不bug。但还没遇到sizeCheck需要重建情况,是bug也不会出错了。
int local_goal_x = -1; int local_goal_y = -1; bool started_path = false; std::vector<geometry_msgs::PoseStamped> adjusted_global_plan; adjustPlanResolution(global_plan, adjusted_global_plan, costmap.getResolution());
adjustPlanResolution对映射到局部地图中的全局路径进行栅格级插补,从而使得整个路径是栅格连续的。插补思路是这样的,1)所有全局路径的坐标点都会保留。2)相邻两个坐标的距离(直角三角形斜边)超过resolution时,内插坐标点,确保相邻两个坐标距离<=resolution。
// skip global path points until we reach the border of the local map
for (unsigned int i = 0; i < adjusted_global_plan.size(); ++i) {
double g_x = adjusted_global_plan[i].pose.position.x;
double g_y = adjusted_global_plan[i].pose.position.y;
unsigned int map_x, map_y;
if (costmap.worldToMap(g_x, g_y, map_x, map_y) && costmap.getCost(map_x, map_y) != costmap_2d::NO_INFORMATION) {
local_goal_x = map_x;
local_goal_y = map_y;
started_path = true;
} else {
if (started_path) {
break;
}// else we might have a non pruned path, so we just continue
}
}for循环目的:找到全局路径中第一个离开局部地图的坐标点。
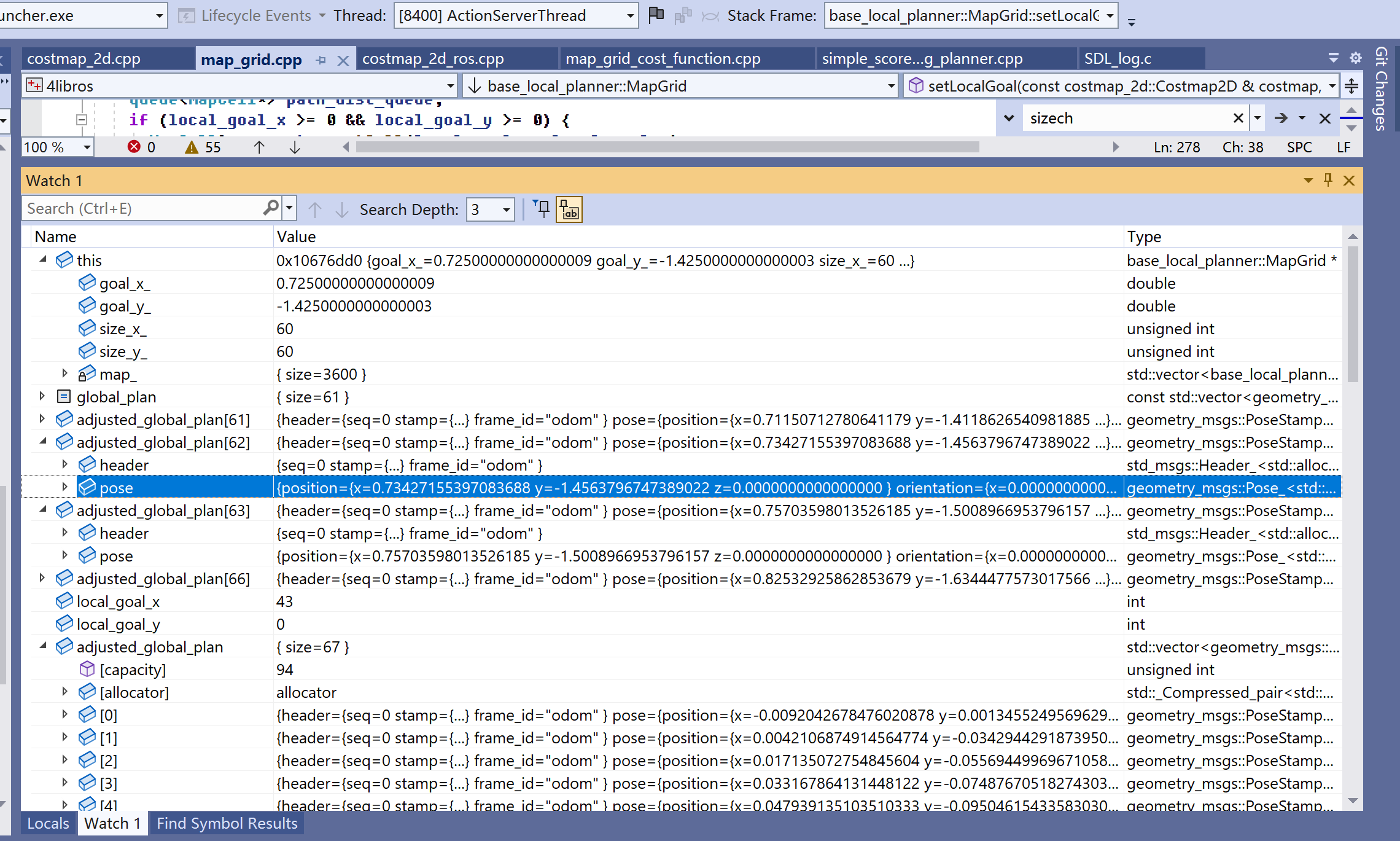
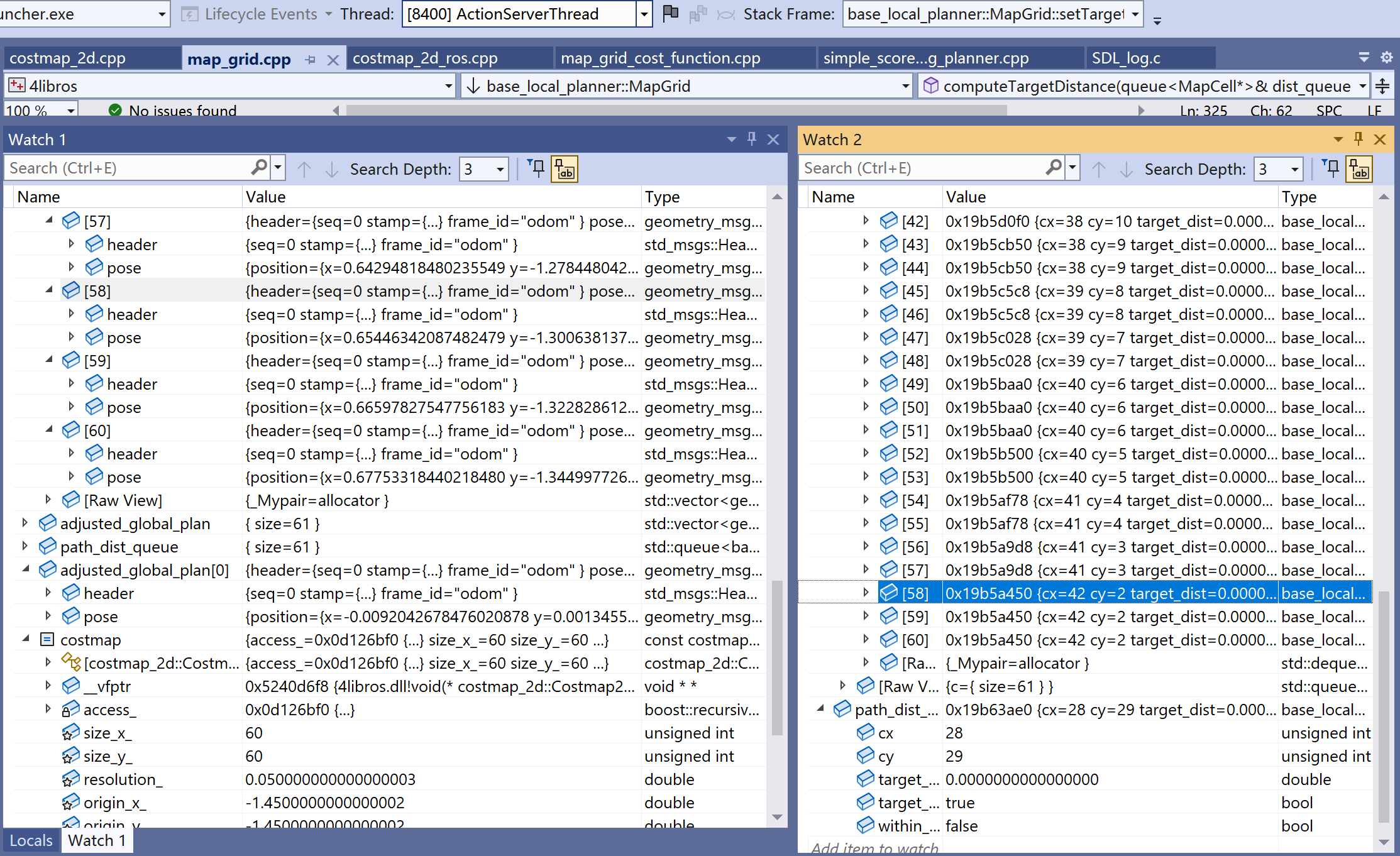
通过图4中的adjusted_global_plan,可看到存储的路径点中,front是靠近机器中心的坐标,back是靠近目标的坐标。由于局部地图垂直半径是1.5米,adjusted_global_plan在快到1.5米的坐标停止了。for找出距离目标最近、但还落在局部地图的坐标是adjusted_global_plan[62]。至此,local_goal_x、local_goal_y存储着[62]的map类型坐标,由于该坐标所在的行在局部地图最南端,又是个map坐标系坐标,local_goal_y就指向局部地图第一行,即local_goal_y = 0。
if (!started_path) {
ROS_ERROR("None of the points of the global plan were in the local costmap, global plan points too far from robot");
return;
}
queue<MapCell*> path_dist_queue;
if (local_goal_x >= 0 && local_goal_y >= 0) {
MapCell& current = getCell(local_goal_x, local_goal_y);
costmap.mapToWorld(local_goal_x, local_goal_y, goal_x_, goal_y_);
current.target_dist = 0.0;
current.target_mark = true;
path_dist_queue.push(¤t);接下要计算局部地图中所有点到[62]坐标的距离。对[62],把target_mark置为true,表示不必再以它为中心去膨胀了。
} computeTargetDistance(path_dist_queue, costmap); }
3.2 MapGrid::computeTargetDistance
参数dist_queue称为零线,computeTargetDistance采用类似dijkstra算法的逐步探索的方式,计算出map_(MapGrid地图)中所有栅格与零线的最短距离。零线中可能是一个点,也可能是多个点,这些点的target_dist(距离)已置为0、target_mark置为true。
void MapGrid::computeTargetDistance(queue<MapCell*>& dist_queue, const costmap_2d::Costmap2D& costmap){
...
while(!dist_queue.empty()){
current_cell = dist_queue.front();
dist_queue.pop();
...
}
}算法结束后会改修改各个MapCell的target_dist。以零点(43, 0)为例,看周围几个点的距离情况。
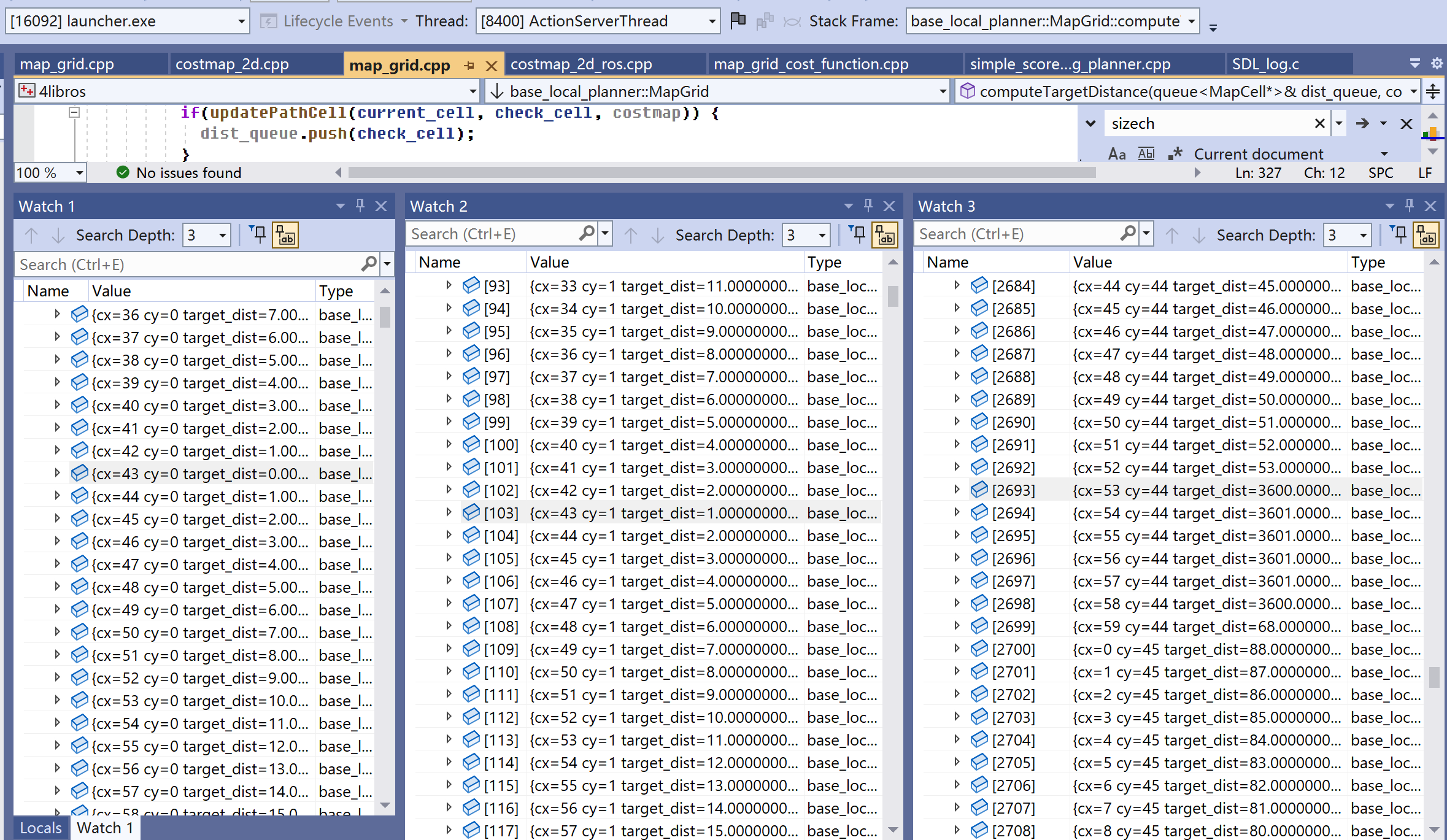
在图5,左侧是y=0时,x=43周围点的值。相邻点(42, 0)、(44, 0)距离是1,隔一栅格距离增1。中间是y=1时,x=43周围点的值。正向(43, 1)距离1,斜向(42, 1)、(44, 1)距离是2。2是如何计算的?——以(42, 1)为例,由零点(43, 0)膨胀出(43, 1),这是第一次膨胀,距离加1变成1。由(43, 1)膨胀出(42, 1),这是第二次膨胀,距离加1变成2。注意,区分这里的距离和直角三角形斜边,按斜边算的话,(42,1)的距离应该是“根号2”。
图5右侧,有些点的距离出现了3600、3601,要理解这个让看下updatePathCell。
inline bool MapGrid::updatePathCell(MapCell* current_cell, MapCell* check_cell,
const costmap_2d::Costmap2D& costmap){
//if the cell is an obstacle set the max path distance
unsigned char cost = costmap.getCost(check_cell->cx, check_cell->cy);
if(! getCell(check_cell->cx, check_cell->cy).within_robot &&
(cost == costmap_2d::LETHAL_OBSTACLE ||
cost == costmap_2d::INSCRIBED_INFLATED_OBSTACLE ||
cost == costmap_2d::NO_INFORMATION)){
check_cell->target_dist = obstacleCosts();
obstacleCosts()数值是map_.size(),示例就是3600。
return false;
}
double new_target_dist = current_cell->target_dist + 1;
if (new_target_dist < check_cell->target_dist) {
check_cell->target_dist = new_target_dist;
}
return true;
}有个疑问,computeTargetDistance会膨胀出代价地图中的所有点吗?——答案会,但前提是代价地图中不能存在距离是obstacleCosts(3600)的点。updatePathCell遇到这些点,会强制以它终止膨胀。那些无法膨胀到的点就保留初始化后的默认值,即unreachableCellCosts(3601)。
除特殊值3600、3601,让估计下距离的最大值。综上所述,要计算点A到零线点的距离,就是从零线点开始,依次画两条直线。第一条垂直,到达A所在的y行,假设那个点是b;第二条水平,由b到A,这两条线经过的栅格数就是距离。于是理论上最大距离就是“size_x_ + size_y_”,对60x60代价地图,最大值是120。所在点直观看就是对角线上的两个点,实际中(local_goal_x, local_goal_y)不大可能恰好是(0, 0)或(59, 0),也就不大可能到最大值,示例中最大距离是102,其栅格坐标(0, 59)。
3.3 MapGrid::setTargetCells
setTargetCells是用来计算轨迹MapGrid地图中所有点到全局路径的最短距离。与setLocalGoal函数的区别主要在于,它的零线不是一个点,而是全局路径中所有落在局部地图内那些点。
void MapGrid::setTargetCells(const costmap_2d::Costmap2D& costmap,
const std::vector<geometry_msgs::PoseStamped>& global_plan) {
sizeCheck(costmap.getSizeInCellsX(), costmap.getSizeInCellsY());
bool started_path = false;
queue<MapCell*> path_dist_queue;
std::vector<geometry_msgs::PoseStamped> adjusted_global_plan;
adjustPlanResolution(global_plan, adjusted_global_plan, costmap.getResolution());
if (adjusted_global_plan.size() != global_plan.size()) {
ROS_DEBUG("Adjusted global plan resolution, added %zu points", adjusted_global_plan.size() - global_plan.size());
}
unsigned int i;
// put global path points into local map until we reach the border of the local map
for (i = 0; i < adjusted_global_plan.size(); ++i) {
double g_x = adjusted_global_plan[i].pose.position.x;
double g_y = adjusted_global_plan[i].pose.position.y;
unsigned int map_x, map_y;
if (costmap.worldToMap(g_x, g_y, map_x, map_y) && costmap.getCost(map_x, map_y) != costmap_2d::NO_INFORMATION) {
MapCell& current = getCell(map_x, map_y);
current.target_dist = 0.0;
current.target_mark = true;
path_dist_queue.push(¤t);
started_path = true;
} else if (started_path) {
break;
}
}for循环目的:把全局路径的坐标逐个存入零线(path_dist_queue),直到遇到第一个离开局部地图的坐标点。
在这里,adjusted_global_plan全部坐标都在局部地图,于是图6中adjusted_global_plan和path_dist_queue的size相等。右侧图中可看到,所有零线中的点,距离都置了0。
if (!started_path) {
ROS_ERROR("None of the %d first of %zu (%zu) points of the global plan were in the local costmap and free",
i, adjusted_global_plan.size(), global_plan.size());
return;
}
computeTargetDistance(path_dist_queue, costmap);
}computeTargetDistance结束后会改修改各个MapCell的target_dist。以零点(42, 2)为例,看它周围几个点的距离情况。

在图7,左侧是y=2时,x=42周围点的值。相邻点(41, 2)、(43, 2)距离是1,隔一栅格距离增1。右侧是y=3时,x=42周围点的值。正向(42, 3)距离1,斜向(41, 3)、(43, 3)距离是0、2。按之前对setLocalGoal理解,这两个坐标都应该是2,但为什么(41, 3)变成了0?——这正是Local和Target不同的地方,因为(41, 3)也在零线,零线内的都是0。
让继续理解(40, 3)。假设是零点(42, 2)先膨胀出(40, 3),距离应该是3。然后零点(41, 3)膨胀出(40, 3),这里距离是1,由于小于3,会覆盖掉(40, 3)之前的3。在setTargetCells,地图中点到全局路径的距离,是该点到全局路径上任何一个点的最短距离。
和setLocalGoal一样原因,距离也会出现3600、3601。
至于可能的最大距离,由于零线是一条线,含有多个点,最大距离通常会比setLocalGoal时小。示例中最大距离是68,其栅格坐标(18, 59)。