
- 只有位置、角度、当前速度,三个条件都满足的情况下,导航才算到达了目标goal。
- 在次序上,是先让满足位置,然后角度和当前速度。rose_ros当前速度总是满足的,因而只要考虑位置、角度。
- 满足位置后,机器人为满足角度需要继续移动,这些移动可能导致机器人不再满足位置要求,这时latch_xy_goal_tolerance=true可让不再检查位置。
- 如何旋转至目标角度?那自然是以一个特定速度移动机器人。这个速度不再使用候选速度那套逻辑,线速度固定(0, 0),角速度则可以认为是机器人当前角度和目标角速差v_theta_samp。形成(0, 0, v_theta_samp)这速度后,用DWAPlanner::checkTrajectory走出一条轨迹,如果这条轨迹能过所有准则,即cost>=0,那不管cost是何时,就把(0, 0, v_theta_samp)发向机器人。
DWAPlannerROS的停止处理逻辑,由LatchedStopRotateController类完成,主要包括三个部分:停止判断、加速停止、旋转至目标角度。
一、停止判断
在move_base的每个控制周期,都会利用DWAPlannerROS::isGoalReached(内部利用LatchedStopRotateController::isGoalReached函数实现)判断是否已经到达了目标点(即位置在xy_goal_tolerance以内,角度在yaw_goal_tolerance以内,且速度小于trans_stopped_velocity,rot_stopped_velocity)。
LatchedStopRotateController::isGoalReached只比较,不执行发送速度这种会改变机器人的操作。
bool LatchedStopRotateController::isGoalReached(LocalPlannerUtil* planner_util,
OdometryHelperRos& odom_helper,
const geometry_msgs::PoseStamped& global_pose) {
double xy_goal_tolerance = planner_util->getCurrentLimits().xy_goal_tolerance;
double theta_stopped_vel = planner_util->getCurrentLimits().theta_stopped_vel;
double trans_stopped_vel = planner_util->getCurrentLimits().trans_stopped_vel;
//copy over the odometry information
nav_msgs::Odometry base_odom;
odom_helper.getOdom(base_odom);
//we assume the global goal is the last point in the global plan
geometry_msgs::PoseStamped goal_pose;
if ( ! planner_util->getGoal(goal_pose)) {
return false;
}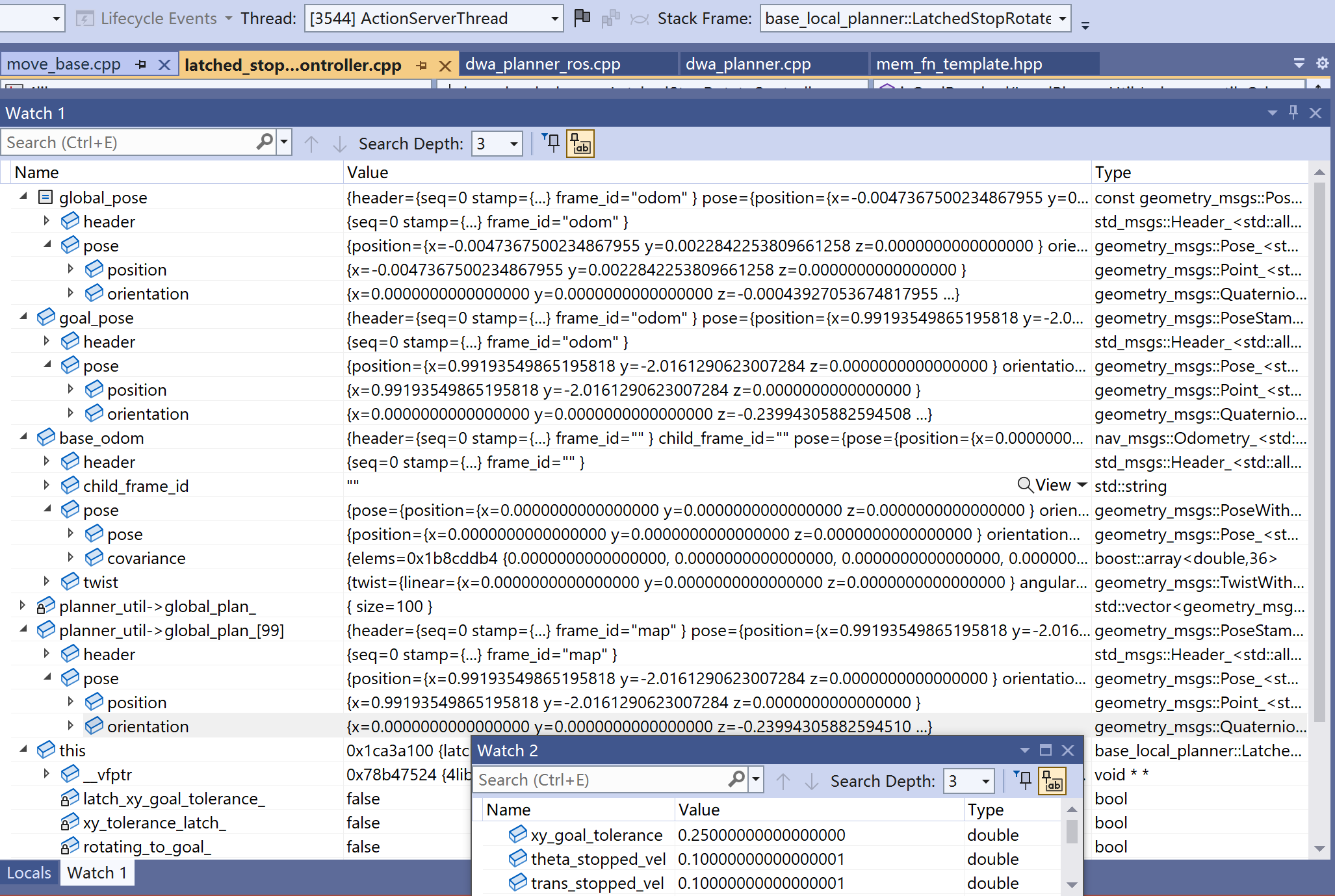
global_pose。机器人当前位姿。DWAPlannerROS运行在本地代价地图,它的global坐标系是odom,global_pose就是base_footprint-->odom的tf。图1示例中机器人待在起始点没动过,所以global_pose值很小。
goal_pose。目标在odom坐标系下的值。为理解这值对照下图1中的planner_util->global_plan_。global_plan_存储着map坐标系下的全局路径,路径最后个点[99]就是目标点,把它变换到odom坐标系下就是goal_pose。示例中map、odom重合,所以goal_pose和global_plan_[99]坐标值相等。
base_odom。机器人当前线速度、角速度。图1是不接收里程计场景,它总是0。意味着后面base_local_planner::stopped(...)总返回true。
double goal_x = goal_pose.pose.position.x;
double goal_y = goal_pose.pose.position.y;
base_local_planner::LocalPlannerLimits limits = planner_util->getCurrentLimits();
//check to see if we've reached the goal position
if ((latch_xy_goal_tolerance_ && xy_tolerance_latch_) ||
base_local_planner::getGoalPositionDistance(global_pose, goal_x, goal_y) <= xy_goal_tolerance) {
//if the user wants to latch goal tolerance, if we ever reach the goal location, we'll
//just rotate in place
if (latch_xy_goal_tolerance_ && ! xy_tolerance_latch_) {
ROS_DEBUG("Goal position reached (check), stopping and turning in place");
xy_tolerance_latch_ = true;
}根据配置变量latch_xy_goal_tolerance_,分为锁存位置和不锁存位置两种处理逻辑。锁存位置(true),即如果机器人在行驶过程中出现过位置满足xy_goal_tolerance的条件时,则设置xy_tolerance_latch_为true,代表已经达到过目标位置,后者目标判断定不用再考虑最终位置分量,只旋转至目标角度即可。
如果不锁存(false),则必须始终满足机器人当前位置是否满足xy_goal_tolerance的条件,满足则代表到达了目标位置。
double goal_th = tf2::getYaw(goal_pose.pose.orientation);
double angle = base_local_planner::getGoalOrientationAngleDifference(global_pose, goal_th);
//check to see if the goal orientation has been reached
if (fabs(angle) <= limits.yaw_goal_tolerance) {
//make sure that we're actually stopped before returning success
if (base_local_planner::stopped(base_odom, theta_stopped_vel, trans_stopped_vel)) {在到达目标位置的前提下,还要判断机器人角度是否满足目标角度yaw_goal_tolerance的需求,如果也满足,则判断当前速度是否满足停止条件,即theta速度小于theta_stopped_vel,x和y的速度小于trans_stopped_velocity。
只有位置、角度、速度,三个条件都满足的情况下,才算机器人到达了目标位姿,isGoalReached函数才会返回true。
return true; } } } return false; }
LatchedStopRotateController中另外有一个到达判断:isPositionReached,它就是让isGoalReached只判断位置。
二、到达位置后,如何减速、对齐角度
在DWAPlannerROS::computeVelocityCommands的每个计算周期内,都会先利用LatchedStopRotateController::isPositionReached函数判断是否已经到达目标位置,如果是,则利用LatchedStopRotateController::computeVelocityCommandsStopRotate函数计算对应的减速停止或者旋转至目标角度的速度指令,否则才会使用DWAPlanner计算最优轨迹对应的速度命令。
对于isPositionReached的判断,和isGoalReached中判断达到位置的逻辑一样,即如果启动了锁存,且xy_tolerance_latch_标志位被标记(即满足过xy_goal_tolerance条件),则认为已经到达;如果未启用锁存,则需要基于当前位置是否满足xy_goal_tolerance确定是否到达了位置。
能执行到computeVelocityCommandsStopRotate,意味着机器人已到达指定位置,但可能不满足两个条件,一是机器人速度可能很快,快到不满足停止时速度;二是机器人角度和目标偏离太大。
bool LatchedStopRotateController::computeVelocityCommandsStopRotate(geometry_msgs::Twist& cmd_vel, ...) {
...
//check to see if the goal orientation has been reached
double goal_th = tf2::getYaw(goal_pose.pose.orientation);
double angle = base_local_planner::getGoalOrientationAngleDifference(global_pose, goal_th);
if (fabs(angle) <= limits.yaw_goal_tolerance) {目前机器人角度已满足要求,认为导航已成功。此种情况下,无视目前机器人速度是否符合条件,这种做法看去是有点粗略,但对常见的一周期速度就近似降到0场景,没啥部问题,反而逻辑上简单了。
//set the velocity command to zero
cmd_vel.linear.x = 0.0;
cmd_vel.linear.y = 0.0;
cmd_vel.angular.z = 0.0;
rotating_to_goal_ = false;
} else {
...
//if we're not stopped yet... we want to stop... taking into account the acceleration limits of the robot
if ( ! rotating_to_goal_ && !base_local_planner::stopped(base_odom, limits.theta_stopped_vel,
limits.trans_stopped_vel)) {目前机器人角度不满足要求,而且机器人速度很快,需要先把速度降下来,再考虑如何对正角度。stopWithAccLimits作用是计算出一个尽快能让机器人把当前速度变为0的速度,至于如何对齐目标角度,这不是它考虑的。
if ( ! stopWithAccLimits(...)) {
ROS_INFO("Error when stopping.");
return false;
}
ROS_DEBUG("Stopping...");
}
//if we're stopped... then we want to rotate to goal
else {目前机器人角度不满足要求,但机器人速度是符合要求了,是该考虑如何对正角度。rotateToGoal作用是计算出一个尽快能让机器人对准目标角度的速度,这个速度线程度是0,只有角速度有值。
把rotating_to_goal_设为true,表示机器人进入到达位置后对齐角度过程,在这个过程会不执行操作,像上面的降速。
//set this so that we know its OK to be moving
rotating_to_goal_ = true;
if ( ! rotateToGoal(...)) {
ROS_INFO("Error when rotating.");
return false;
}
ROS_DEBUG("Rotating...");
}
}
return true;
}
三、降低速度:stopWithAccLimits
stopWithAccLimits作用是计算出一个尽快能让机器人把当前速度变为0的速度。
bool LatchedStopRotateController::stopWithAccLimits(const geometry_msgs::PoseStamped& global_pose,
const geometry_msgs::PoseStamped& robot_vel,
geometry_msgs::Twist& cmd_vel,
Eigen::Vector3f acc_lim,
double sim_period,
boost::function<bool (Eigen::Vector3f pos,
Eigen::Vector3f vel,
Eigen::Vector3f vel_samples)> obstacle_check) {
//slow down with the maximum possible acceleration...
//we should really use the frequency that we're running at to determine what is feasible
//but we'll use a tenth of a second to be consistent with the implementation of the local planner.
double vx = sign(robot_vel.pose.position.x) * std::max(0.0, (fabs(robot_vel.pose.position.x) - acc_lim[0] * sim_period));
double vy = sign(robot_vel.pose.position.y) * std::max(0.0, (fabs(robot_vel.pose.position.y) - acc_lim[1] * sim_period));
double vel_yaw = tf2::getYaw(robot_vel.pose.orientation);
double vth = sign(vel_yaw) * std::max(0.0, (fabs(vel_yaw) - acc_lim[2] * sim_period));robot_vel.pose.position.x等于twist.twist.linear.x,robot_vel.pose.position.y等于twist.twist.linear.y,robot_vel.pose.orientation来自twist.twist.angular.z,参考OdometryHelperRos::getRobotVel。
如何计算出一个尽快能让机器人把当前速度变为0的速度,简单操作,把存放结果的cmd_vel中的线速度、角速度都设为0,就可以了。这么操作有个问题,如果目前机器人速度很快,快到以最大加速度(acc_lim)减速,到sim_period后还是到达不了0,这时为安全就须要给指定个按最大加速度算出的结束速度。vx、vy、vel_yaw正是以着这个加速度约束去计算。
负速度表示的是机器人要反方向运动,不要轻易理解为负数是个无效速度。举个示例,目前x方向线程度(position.x)是-0.6,(acc_lim[0] * sim_period)是0.25,那算出的结果速度是-0.35,即在下一刻,在x方向,希望机器人以着0.35米/秒速度反方向运行。
//we do want to check whether or not the command is valid double yaw = tf2::getYaw(global_pose.pose.orientation); bool valid_cmd = obstacle_check(Eigen::Vector3f(global_pose.pose.position.x, global_pose.pose.position.y, yaw), Eigen::Vector3f(robot_vel.pose.position.x, robot_vel.pose.position.y, vel_yaw), Eigen::Vector3f(vx, vy, vth));
obstacle_check指向的操作是DWAPlanner::checkTrajectory。它试图以当前机器人位姿、当前速度,判断在地图上,是否能以速度(vx, vy, vth)走出一条路径。能走出一条路径(cost > 0),或目前已基本接近goal(cost == 0),则返回true。
//if we have a valid command, we'll pass it on, otherwise we'll command all zeros
if(valid_cmd){
ROS_DEBUG_NAMED("latched_stop_rotate", "Slowing down... using vx, vy, vth: %.2f, %.2f, %.2f", vx, vy, vth);
cmd_vel.linear.x = vx;
cmd_vel.linear.y = vy;
cmd_vel.angular.z = vth;
return true;
}
ROS_WARN("Stopping cmd in collision");
cmd_vel.linear.x = 0.0;
cmd_vel.linear.y = 0.0;
cmd_vel.angular.z = 0.0;
return false;
}
四、旋转至目标角度:rotateToGoal
rotateToGoal负责计算要让机器人旋转至目标角度,该运行什么速度。首先将x和y速度设置为0,对于theta速度,利用当前角度与目标角度的差的比例控制(系数为1)产生,然在三个方面进行微调,让它是目前机器人状态下可到达的速度。接着利用DWAPlanner::checkTrajectory进行轨迹打分,验证这速度是否可行。
向上返回的cmd_vel,其线速度一定是0,角速度在失败时是0,成功时v_theta_samp。
bool LatchedStopRotateController::rotateToGoal(
const geometry_msgs::PoseStamped& global_pose,
const geometry_msgs::PoseStamped& robot_vel,
double goal_th,
geometry_msgs::Twist& cmd_vel,
Eigen::Vector3f acc_lim,
double sim_period,
base_local_planner::LocalPlannerLimits& limits,
boost::function<bool (Eigen::Vector3f pos,
Eigen::Vector3f vel,
Eigen::Vector3f vel_samples)> obstacle_check) {- @global_pose。机器人当前位姿。DWAPlannerROS运行在本地代价地图,它的全局坐标系是odom,global_pose就是base_footprint-->odom的tf。
- @robot_vel。机器人当前速度。
- @goal_th。在odom坐标系下,goal要求的角度。
- @cmd_vel[输出参数]。为实现按goal_th,希望接下机器人运行的速度。只有返回值true时有效。
- @acc_lim。planner_util_.getCurrentLimits().getAccLimits()。实例:(1.25, 0, 5)。
- @sim_period。dp_->getSimPeriod()。实例:0.2秒。
- @limits。planner_util->getCurrentLimits()。用了当中两个字段,min_vel_theta(最小角速度)、max_vel_theta(最大角速度)。实例:(-1, 1)。
- @obstacle_check。一个可执行验证障碍的操作。
double yaw = tf2::getYaw(global_pose.pose.orientation); double vel_yaw = tf2::getYaw(robot_vel.pose.orientation); cmd_vel.linear.x = 0; cmd_vel.linear.y = 0; double ang_diff = angles::shortest_angular_distance(yaw, goal_th); double v_theta_samp = std::min(limits.max_vel_theta, std::max(limits.min_vel_theta, fabs(ang_diff))); //take the acceleration limits of the robot into account double max_acc_vel = fabs(vel_yaw) + acc_lim[2] * sim_period; double min_acc_vel = fabs(vel_yaw) - acc_lim[2] * sim_period; v_theta_samp = std::min(std::max(fabs(v_theta_samp), min_acc_vel), max_acc_vel); //we also want to make sure to send a velocity that allows us to stop //when we reach the goal given our acceleration limits double max_speed_to_stop = sqrt(2 * acc_lim[2] * fabs(ang_diff)); v_theta_samp = std::min(max_speed_to_stop, fabs(v_theta_samp)); v_theta_samp = std::min(limits.max_vel_theta, std::max(limits.min_vel_theta, v_theta_samp));
如何能让机器人角度旋转至目标角度,简单的话,让以两个角度的差值(ang_diff)作为存储结果的cmd_vel中的角速度、线速度则都设为0,就可以了。这么操作有个问题,以机器人目前状态,真能得到这角速度吗,后面就是用三种条件对这个初略算出的速度(v_theta_samp)进行修正。
- [min_vel_theta, max_vel_theta]是机器人到做到的角速度范围,最终角速度须要在这范围。
- 机器人有个初速度vel_yaw,需是以该速度经过sim_period秒后能到达的速度范围[min_acc_vel, max_acc_vel]。
- 假设机器人做初速度为0的匀加速运动,为转过ang_diff弧度,末速度不能超过max_speed_to_stop。下面有说如何得出末速度公式:
。
if (ang_diff < 0) {
v_theta_samp = - v_theta_samp;
}
//we still want to lay down the footprint of the robot and check if the action is legal
bool valid_cmd = obstacle_check(Eigen::Vector3f(global_pose.pose.position.x, global_pose.pose.position.y, yaw),
Eigen::Vector3f(robot_vel.pose.position.x, robot_vel.pose.position.y, vel_yaw),
Eigen::Vector3f( 0.0, 0.0, v_theta_samp));obstacle_check指向的操作是DWAPlanner::checkTrajectory。它试图以当前机器人位姿、当前速度,判断在地图上,是否能以速度v_theta_samp走出一条路径。能走出一条路径(cost > 0),或目前已基本接近goal(cost == 0),则返回true。
if (valid_cmd) {
cmd_vel.angular.z = v_theta_samp;
return true;
}
ROS_WARN("Rotation cmd in collision");
cmd_vel.angular.z = 0.0;
return false;
}公式1:
公式2:,把
做为应变量,可得到:
假设机器人做初速度为0的匀加速运动,即为0,将公式2替换掉公式1中的
,就可得到
。