
- ompl相关编程分为四步,依次是设置目标状态、设置起始状态、求解和读取规划结果。
- 向ompl设置的初始状态是实时从joint_state_publiser结点收到的/joint_states。
- ompl规化出的路径存放在ompl::base::PlannerSolution,成员path_对应路径。注意,一个path_封装的是一条路径,不是路径中的一个点。path_类型是ompl::base::Path,它是个协议类。对基于Geometric方式的路径规划算法,像RRTConnect,最终类型是个从Path派生的PathGeometric。在PathGeometric内,路径具体存放在states_成员,其类型std::vector<base::State *>。vector中的一个base::State单元表示路径中的一个点。
为方便叙述,本文给出一个关节规划示例
- 机械臂有a、b、c三个关节,都是单自由度。
- 初始状态:(-0.56, 0.79, -0.45)
- 目标状态:(1, 2, -1)
“server处理move action:MoveGroupMoveAction”提到ModelBasedPlanningContext::solve得到规划轨迹,并存放在ompl_simple_setup_。本文叙述在关节规划时,ompl具体怎么处理。
关节规划是用户把关节状态(JointState)作为目标,因为最后发向机械臂的js就是关节状态,因而只要找出中间那些个关节状态就行。对所给示例,文末给出了规划轨迹,一共72个点,索引0就是初始状态,索引71是个和目标状态在容错误差内的值。
由于关节状态不须要转换,在五种规划中,它最简单。按ompl教程(英文)/中文,我把moveit相关编程分为四步,依次是设置目标状态、设置起始状态、求解和读取规划结果。
注:ompl教程也可说是4步,但那里先设置起始状态,然后目标状态,这两操作的次序应该没要求,moveit是先设置目标状态。
一、设置目标状态
<libros>/moveit_planners/ompl/ompl_interface/src/model_based_planning_context.cpp
------
ompl::base::GoalPtr ompl_interface::ModelBasedPlanningContext::constructGoal()
{
// ******************* set up the goal representation, based on goal constraints
std::vector<ob::GoalPtr> goals;
for (kinematic_constraints::KinematicConstraintSetPtr& goal_constraint : goal_constraints_)
{
constraint_samplers::ConstraintSamplerPtr constraint_sampler;
if (spec_.constraint_sampler_manager_)
constraint_sampler = spec_.constraint_sampler_manager_->selectSampler(getPlanningScene(), getGroupName(),
goal_constraint->getAllConstraints());
if (constraint_sampler)
{
ob::GoalPtr goal = ob::GoalPtr(new ConstrainedGoalSampler(this, goal_constraint, constraint_sampler));
goals.push_back(goal);
}
}
if (!goals.empty())
return goals.size() == 1 ? goals[0] : ompl::base::GoalPtr(new GoalSampleableRegionMux(goals));
...
}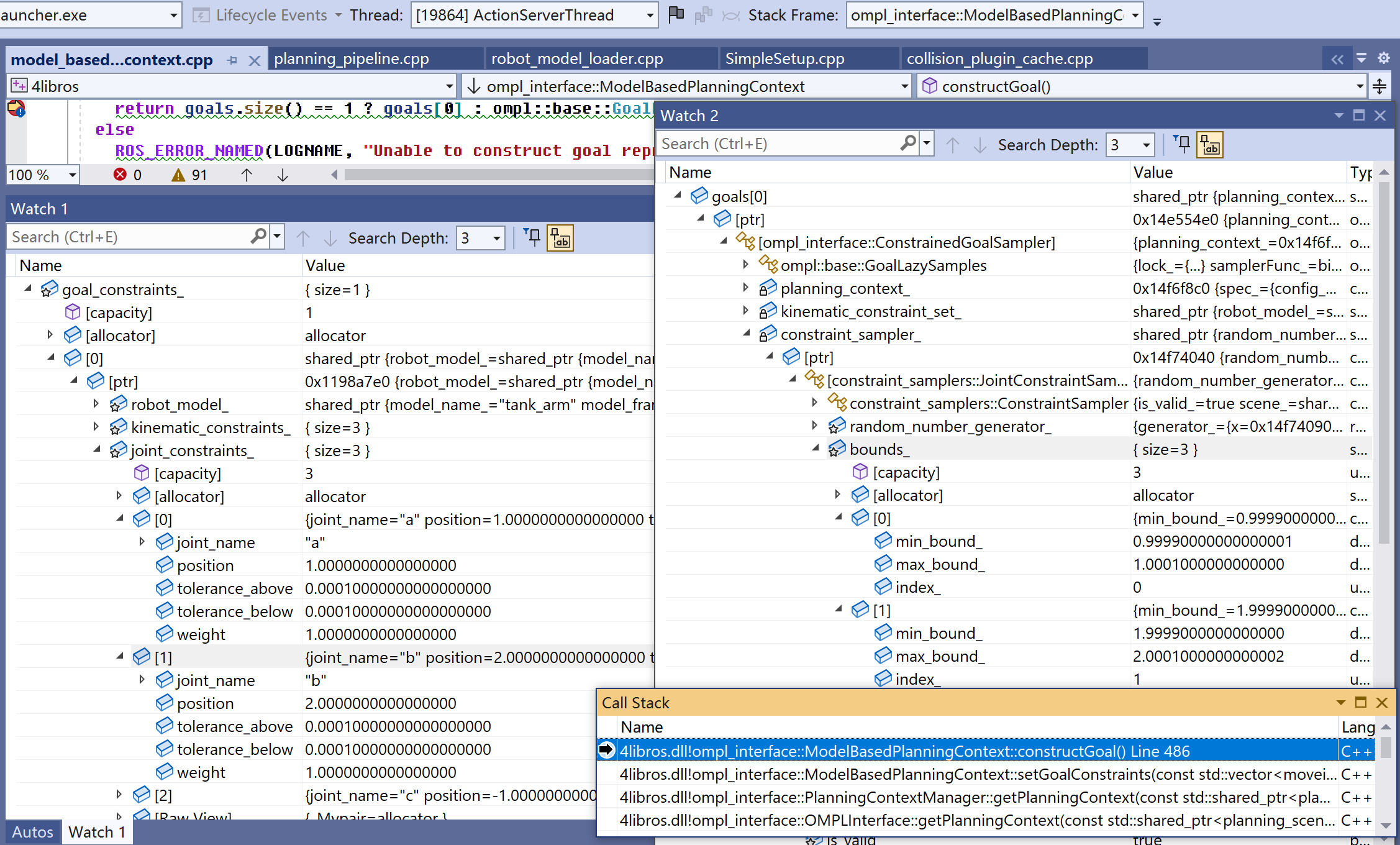
constructGoal功能是以KinematicConstraintSet类型的goal_constraints_为输入,生成ConstrainedGoalSampler类型的目标状态器goals,goals[0]就是要设置到ompl的目标状态。图1左侧是goal_constraints_,目标js存在当中的joint_constraints_,右侧是要生成的目标:ConstrainedGoalSampler。bounds_存储着转换后的目标js,说来就是把原js加上tolerance。看下调用constructGoal的setGoalConstraints。
<libros>/moveit_planners/ompl/ompl_interface/src/model_based_planning_context.cpp
------
bool ompl_interface::ModelBasedPlanningContext::setGoalConstraints(
const std::vector<moveit_msgs::Constraints>& goal_constraints, const moveit_msgs::Constraints& path_constraints,
moveit_msgs::MoveItErrorCodes* error)
{
// ******************* check if the input is correct
goal_constraints_.clear();
for (const moveit_msgs::Constraints& goal_constraint : goal_constraints)
{
moveit_msgs::Constraints constr = kinematic_constraints::mergeConstraints(goal_constraint, path_constraints);
kinematic_constraints::KinematicConstraintSetPtr kset(
new kinematic_constraints::KinematicConstraintSet(getRobotModel()));
kset->add(constr, getPlanningScene()->getTransforms());
if (!kset->empty())
goal_constraints_.push_back(kset);
}
...
ob::GoalPtr goal = constructGoal();
ompl_simple_setup_->setGoal(goal);
return static_cast<bool>(goal);
}ModelBasedPlanningContext::setGoalConstraints会实时生成goal_constraints_,然后调用constructGoal生成goal,最终ompl_simple_setup_->setGoal(goal)向ompl设置目标状态。
二、设置起始状态
<libros>/moveit_planners/ompl/ompl_interface/src/model_based_planning_context.cpp
------
void ompl_interface::ModelBasedPlanningContext::configure(const ros::NodeHandle& nh, bool use_constraints_approximations)
{
...
// convert the input state to the corresponding OMPL state
ompl::base::ScopedState<> ompl_start_state(spec_.state_space_);
spec_.state_space_->copyToOMPLState(ompl_start_state.get(), getCompleteInitialRobotState());
ompl_simple_setup_->setStartState(ompl_start_state);
ompl_simple_setup_->setStateValidityChecker(ob::StateValidityCheckerPtr(new StateValidityChecker(this)));
...
useConfig();
if (ompl_simple_setup_->getGoal())
ompl_simple_setup_->setup();
}用spec_.state_space_构造出ompl_start_state,要以getCompleteInitialRobotState()为源向ompl_start_state设置值,这个源就是complete_initial_robot_state_。
const moveit::core::RobotState& getCompleteInitialRobotState() const
{
return complete_initial_robot_state_;
}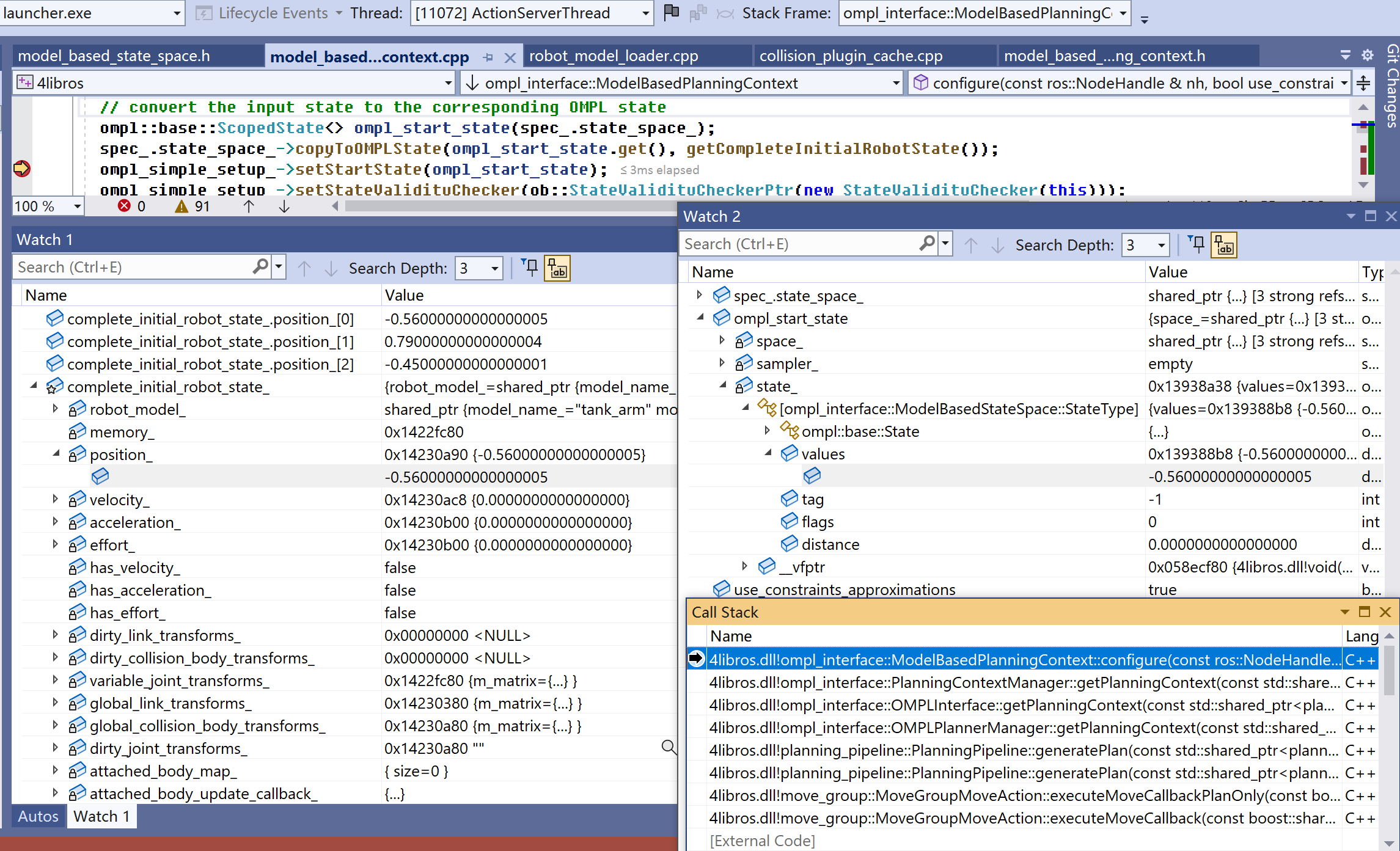
图2左侧是complete_initial_robot_state_,初始js存在当中的position_,右侧是要设置到ompl的初始状态:ompl_start_state,values存储着值,就是原样赋值。得到ompl_start_state后,就调用ompl_simple_setup_->setStartState(ompl_start_state)把初始关态设置到ompl。
complete_initial_robot_state_类型是moveit::core::RobotState,moveit怎么更新当中的position?来自planning_scene->getCurrentStateUpdated(req.start_state)。让看下PlanningContextManager::getPlanningContext,它依次执行了1)得到当前RobotState。2)向ompl设置目标关态。3)向ompl设置初始状态。
ompl_interface::ModelBasedPlanningContextPtr ompl_interface::PlanningContextManager::getPlanningContext(
const planning_scene::PlanningSceneConstPtr& planning_scene, const moveit_msgs::MotionPlanRequest& req,
moveit_msgs::MoveItErrorCodes& error_code, const ros::NodeHandle& nh, bool use_constraints_approximation) const
{
...
ModelBasedPlanningContextPtr context = getPlanningContext(pc->second, factory_selector, req);
if (context)
{
context->clear();
moveit::core::RobotStatePtr start_state = planning_scene->getCurrentStateUpdated(req.start_state);得到当前RobotState,后面setCompleteInitialState是把它设置到complete_initial_robot_state_。深入getCurrentStateUpdated会看到源是PlanningScene中的robot_state_,那何时更新robot_state_?——在PlanningScene::getCurrentStateNonConst()。
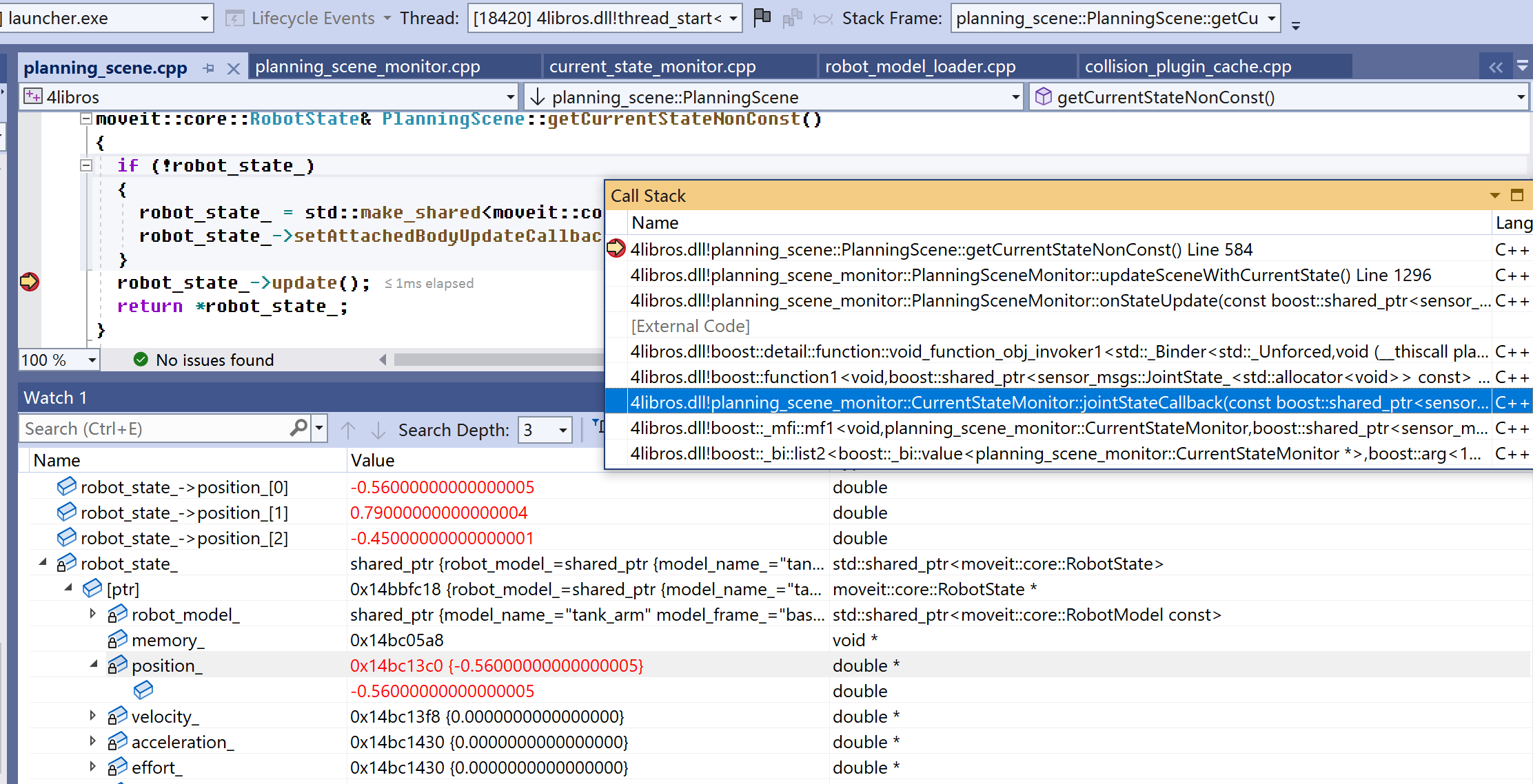
图3显示了getCurrentStateNonConst()调用时刻。它的上层函数有个叫CurrentStateMonitor::jointStateCallback,该函数的触发时机正是在move_group收到/joint_states话题时。也就是说,move_group向ompl设置的初始状态是实时从joint_state_publiser结点收到的/joint_states。
// Setup the context context->setPlanningScene(planning_scene); context->setMotionPlanRequest(req); context->setCompleteInitialState(*start_state); context->setPlanningVolume(req.workspace_parameters); if (!context->setPathConstraints(req.path_constraints, &error_code)) return ModelBasedPlanningContextPtr(); if (!context->setGoalConstraints(req.goal_constraints, req.path_constraints, &error_code)) return ModelBasedPlanningContextPtr();
setGoalConstraints设置目标状态,分析见上面。
try
{
context->configure(nh, use_constraints_approximation);configure设置起始状态,分析见上面。
ROS_DEBUG_NAMED(LOGNAME, "%s: New planning context is set.", context->getName().c_str());
error_code.val = moveit_msgs::MoveItErrorCodes::SUCCESS;
}
catch (ompl::Exception& ex)
{
ROS_ERROR_NAMED(LOGNAME, "OMPL encountered an error: %s", ex.what());
context.reset();
}
}
return context;
}
三、求解
ompl_simple_setup_->solve负责求解,即调用ompl::geometric::SimpleSetup::solve。默认用的路径规划算法是RTTConnect,具体执行的操作是ompl::geometric::RRTConnect::solve(...),参考“RRTConnect::solve和生成路径”。
四、读取规划结果
“server处理move action:MoveGroupMoveAction”中有写,会执行ModelBasedPlanningContext内的“getSolutionPath(*res.trajectory_)”,把存放在ompl_simple_setup_规划出的路径转成RobotTrajectory类型,并放在traj。
bool ompl_interface::ModelBasedPlanningContext::getSolutionPath(robot_trajectory::RobotTrajectory& traj) const
{
traj.clear();
if (ompl_simple_setup_->haveSolutionPath())
convertPath(ompl_simple_setup_->getSolutionPath(), traj);
return ompl_simple_setup_->haveSolutionPath();
}convertPath具体执行转换,第一个参数ompl_simple_setup_->getSolutionPath()得到的就是ompl_simple_setup_中路径,它最终会调用PlannerSolutionSet的getTopSolution。
<libros>/ompl/base/src/ProblemDefinition.cpp
------
class ProblemDefinition::PlannerSolutionSet
{
PathPtr getTopSolution()
{
std::lock_guard<std::mutex> slock(lock_);
PathPtr copy;
if (!solutions_.empty())
copy = solutions_[0].path_;
return copy;
}
};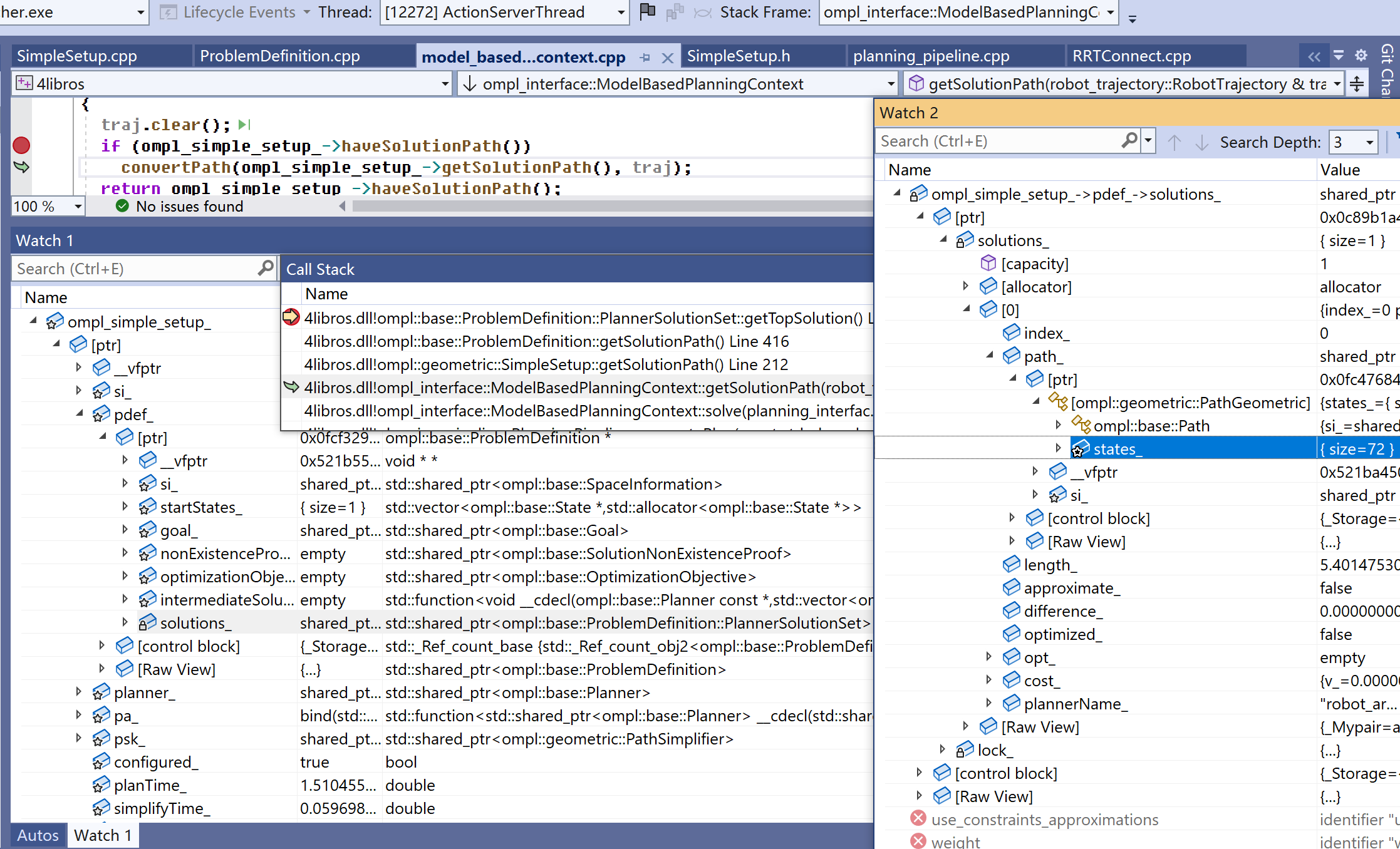
图4左侧显示了ompl_simple_setup_成员,有个类型ProblemDefinition变量pdef_,顾名思义,它封装了问题描述,成员solutions_存储着规化出的路径。
图4右侧显示solutions_。当中有两个名称是solutions_变量,外层是个PlannerSolutionSet对象,内中有个同名solutions_成员,类型std::vector<PlannerSolution>,这个vector的第一单元便是最后规划出的路径,getTopSolution()中的“Top”就是指vector的第一个。
具体到PlannerSolution,成员path_对应路径。注意,一个path_封装的是一条路径,不是路径中的一个点。path_类型是ompl::base::Path,它是个协议类。对基于Geometric方式的规化方法,像RRTConnect,最终类型是个从Path派生的PathGeometric。在PathGeometric内,路径具体存放在states_成员,其类型std::vector<base::State *>。vector中的一个base::State单元表示路径中的一个点,当然base::State自身是没法存储路径点,而是它的派生类ModelBasedStateSpace::StateType。对应到示例,states_长度是72,意味着规划出路径有72个点。
------size: 72 [0/71] (-0.56,0.79,-0.45) [1/71] (-0.538027,0.807043,-0.457747) [2/71] (-0.516054,0.824086,-0.465493) [3/71] (-0.494081,0.841129,-0.47324) [4/71] (-0.472108,0.858173,-0.480986) [5/71] (-0.450135,0.875216,-0.488733) [6/71] (-0.428162,0.892259,-0.49648) [7/71] (-0.406189,0.909302,-0.504226) ... [64/71] (0.846268,1.88076,-0.945782) [65/71] (0.868241,1.89781,-0.953529) [66/71] (0.890214,1.91485,-0.961276) [67/71] (0.912187,1.93189,-0.969022) [68/71] (0.93416,1.94894,-0.976769) [69/71] (0.956133,1.96598,-0.984515) [70/71] (0.978106,1.98302,-0.992262) [71/71] (1.00008,2.00006,-1.00001)