
本文转自“心之器机的ompl”中和RRTConnect相关的三篇文章。
一、从零开始的OMPL库算法学习记录(0)
写在开头
毕设要做基于moveit的零件抓取,现在进度卡在解决place_pose_orientation的倾斜问题,所以开始学习moveit下的ompl库。希望能坚持下去,并分享给大家。本学习记录只关注算法原理,不关注程序实现。
OMPL
ompl(The Open Motion Planning Library)的全称是开源运动规划库,基于采样方法,包含了各种先进的路径规划算法。其算法分为两类,Geometric planners和control-based planners。在moveit生成的ompl_planning.yaml文件中,可供选择的算法有以下几种:
- SBL - EST - LBKPIECE - BKPIECE - KPIECE - RRT - RRTConnect - RRTstar - TRRT - PRM - FMT - BFMT - PDST - STRIDE - BiTRRT - LBTRRT - BiEST - ProjEST - LazyPRM - LazyPRMstar - SPARS - SPARStwo
看起来一头雾水。其默认选择为RRTConnet。
采样算法
opml库中的算法是基于采样的,那什么是采样算法呢?采样算法又称蒙特卡罗方法。它解决的问题是:给定一个概率分布p(x),如何让计算机生成满足这个概率分布的样本。 这个问题就叫采样。其本质是对随机现象的模拟,根据给定的概率分布 ,来模拟产生一个对应的随机事件。
首先我们来看一个简单的例子,假设我们想对下面的二项分布进行采样:
P(X=0)=0.5, P(X=1)=0.5
我们如何采样得到X的值?我们会很毫不费力地想到“抛硬币”,如果硬币正面朝上,则X=1,否则,X=0。那计算机怎么做,使用随机数生成器生成0到1之间的随机数r,k如果r<0.5,则X=1,否则,X=0。
二、从零开始的OMPL库算法学习(1)RRT算法
简介
RRT 算法(快速扩展随机树,rapidly exploring random tree)是一种随机性算法,它可以直接应用于非完整约束系统的规划,不需进行路径转换,所以它的算法复杂度较小,尤为适用于高维多自由度的系统。
缺点是得到的路径质量不是很好。
其思想是快速扩张一群像树一样的路径以探索(填充)空间的大部分区域,伺机找到可行的路径。
RRT 的基本步骤是:
- 起点作为一颗种子,从它开始生长枝丫;
- 在机器人的“构型”空间中,生成一个随机点X;
- 在树上找到距离X最近的那个点,记为Y吧;
- 朝着X的方向生长,如果没有碰到障碍物就把生长后的树枝和端点添加到树上,返回 2;
实际效果如图2。
伪代码
function BuildRRT(qinit, K, Δq) T.init(qinit) for k = 1 to K qrand = Sample() -- chooses a random configuration qnearest = Nearest(T, qrand) -- selects the node in the RRT tree that is closest to qrand if Distance(qnearest, qgoal) < Threshold then return true qnew = Extend(qnearest, qrand, Δq) -- moving from qnearest an incremental distance in the direction of qrand if qnew ≠ NULL then T.AddNode(qnew) return false function Sample() -- Alternatively,one could replace Sample with SampleFree(by using a collision detection algorithm to reject samples in C_obstacle p = Random(0, 1.0) if 0 < p < Prob then return qgoal elseif Prob < p < 1.0 then return RandomNode()
初始化时随机树T只包含一个节点:根节点qinit。首先Sample函数从状态空间中随机选择一个采样点qrand(4行);然后Nearest函数从随机树中选择一个距离qrand最近的节点qnearest(5行);最后Extend函数通过从qnearest向qrand扩展一段距离,得到一个新的节点qnew(8行)。如果qnew与障碍物发生碰撞,则Extend函数返回空,放弃这次生长,否则将qnew加入到随机树中。重复上述步骤直到qnearest和目标点qgaol距离小于一个阈值,则代表随机树到达了目标点,算法返回成功(6~7行)。为了使算法可控,可以设定运行时间上限或搜索次数上限(3行)。如果在限制次数内无法到达目标点,则算法返回失败。
为了加快随机树到达目标点的速度,简单的改进方法是:在随机树每次的生长过程中,根据随机概率来决定qrand是目标点还是随机点。在Sample函数中设定参数Prob,每次得到一个0到1.0的随机值p,当0<p<Prob的时候,随机树朝目标点生长行;当Prob<p<1.0时,随机树朝一个随机方向生长。
三、从零开始的OMPL库算法学习(2)RRT-connect算法
简介
RRT-connect算法是基于RRT算法的一种算法,它从起始点和终点同时生长两棵快速扩展随机树来搜索状态空间,效率会更高。其伪代码如图所示:
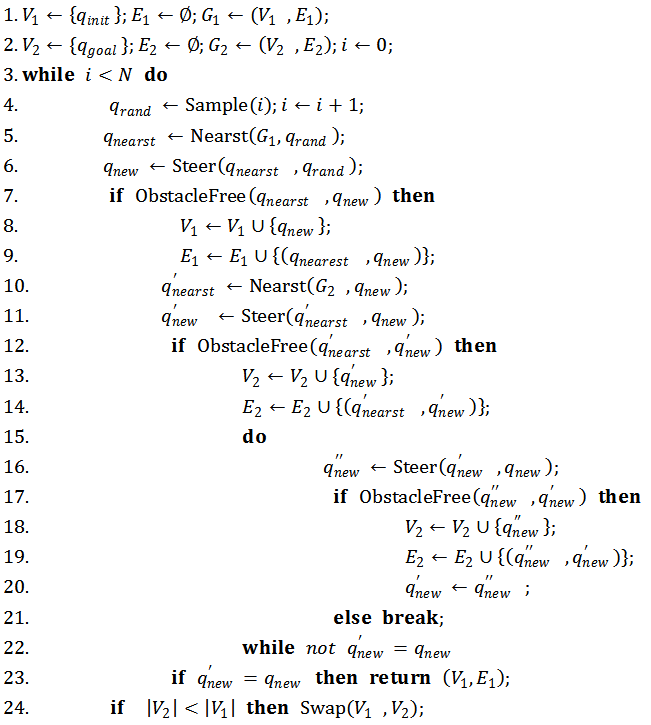
每一次迭代中,开始步骤与原始的RRT算法一样,都是采样随机点然后进行扩展。然后扩展完第一棵树的新节点后,以这个新的目标点作为第二棵树扩展的方向。同时第二棵树扩展的方式略有不同(15~22行),首先它会扩展第一步得到
,如果没有碰撞,继续往相同的方向扩展第二步,直到扩展失败或者
表示与第一棵树相连了,即connect了,整个算法结束。每次选择较小的那棵树进行拓展,搜索速度、搜索效率有了显著提高。