
参考
一、安装openrave
这里介绍的安装openrave适用于新安装的ubuntu 20.04。至少ubuntu要没安装过python。
1.1 openrave-installation
下载openrave-installation:https://github.com/crigroup/openrave-installation
强烈建议下载最新版,较老openrave-installation不支持20.04,这里须要下载支持20.04的版本,类似出现了下面语句。
# Check ubuntu version
UBUNTU_VER=$(lsb_release -sr)
if [ ${UBUNTU_VER} != '14.04' ] && [ ${UBUNTU_VER} != '16.04' ] && [ ${UBUNTU_VER} != '18.04' ] \
&& [ ${UBUNTU_VER} != '20.04' ]; then
echo "ERROR: Unsupported Ubuntu version: ${UBUNTU_VER}"
echo " Supported versions are: 14.04, 16.04, 18.04, and 20.04"
exit 1
fi下载的*.sh中有出现“pip install ...”,为安全,我是在它们前面加了“sudo”。不加或许也能成功吧。
有了4个*.sh脚本后,按顺序执行命令。
$ ./install-dependencies.sh $ ./install-osg.sh $ ./install-fcl.sh $ ./install-openrave.sh
以上4个sh成功执行后,在终端输入下面命令测试。
$ openrave.py --example hanoi
在终端输入“python”,测试下此时python版本,应该是2.7.x。

二、安装ROS Noetic
安装步骤:Ubuntu install of ROS Noetic
安装成功后,继续安装功能包:collada_urdf。
$ sudo apt install ros-noetic-collada-urdf
注意“PACKAGE”中的横杆。在目录名/opt/ros/noetic/share/collada_urdf,横杆是下横杆,但在apt install,横杆是中横杆。
三、用UR5模型,生成C++逆运动学求解源码
3.1 下载UR5模型
下载universal_robot:https://github.com/ros-industrial/universal_robot。本文只用到当中<universal_robot>/ur_description目录,模型ur5_joint_limited_robot.urdf.xacro。
3.2 基于ur_description,创建或加入私有功能包
以创建私有工作包为例,假设要创建的私有功能包名称是moveit_ws。
$ mkdir ~p ~/moveit_ws/src $ cd ~/moveit_ws/src $ catkin_init_workspace $ cd ~/moveit_ws $ catkin_make $ source devel/setup.bash
catkin_make成功后,把目录<universal_robot>/ur_description复制到~/moveit_ws/src,再重新catkin_make。
3.3 xacro格式转换成urdf格式
$ cd ~/moveit_ws/src/ur_description/urdf $ rosrun xacro xacro --inorder -o ur5.urdf ur5_joint_limited_robot.urdf.xacro
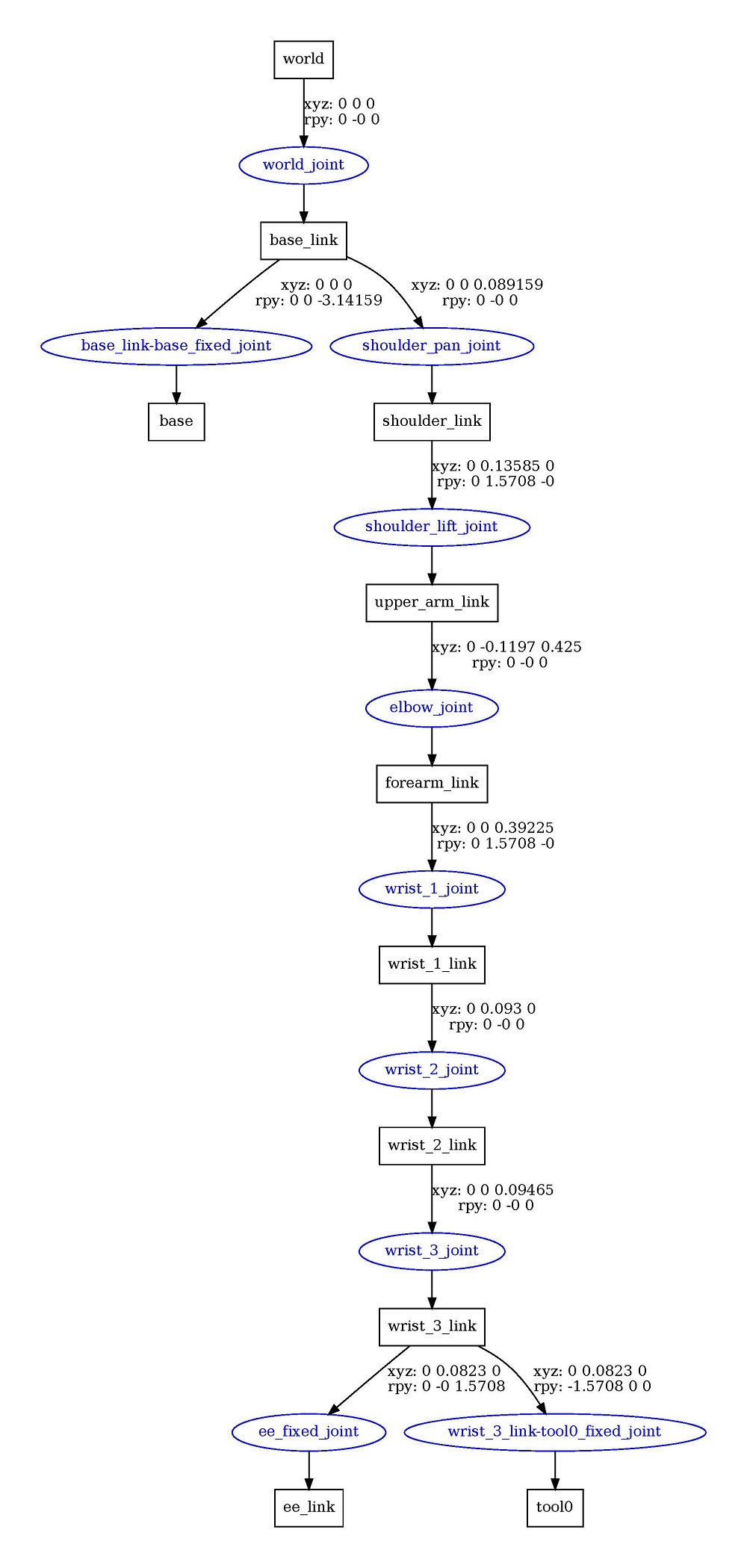
转换成功后,可执行“urdf_to_graphiz ur5.urdf”生成ur5.pdf,打开pdf查看该模型整体结构。
3.4 urdf格式转换成dae格式
$ rosrun collada_urdf urdf_to_collada ur5.urdf ur5.dae
设置精度
$ export IKFAST_PRECISION="5" $ rosrun moveit_kinematics round_collada_numbers.py ur5.dae ur5.dae "$IKFAST_PRECISION"
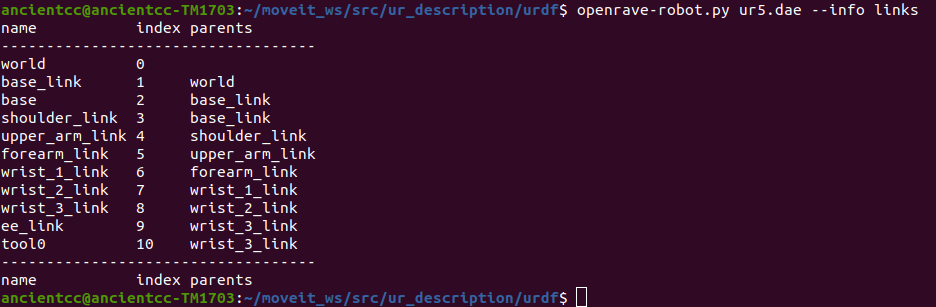
查看关节数据
$ openrave-robot.py ur5.dae --info links
查看三维模型
$ openrave ur5.dae
3.5 生成IKFast C++文件
$ sudo python `openrave-config --python-dir`/openravepy/_openravepy_/ikfast.py --robot=ur5.dae --iktype=transform6d --baselink=0 --eelink=9 --savefile=$(pwd)/ikfast61.cpp
注意要加“sudo”,sympy模块的路径在“/root/.local/lib/python2.7/site-packages”(0.7.1),要有管理权限才能读取。没有权限会报找不到sympy模块。
Traceback (most recent call last): File "/usr/local/lib/python2.7/dist-packages/openravepy/_openravepy_/ikfast.py", line 179, in <module> from sympy import __version__ as sympy_version ImportError: No module named sympy
上面生成ikfast C++源码的时候,用到了openravepy模块,其安装路径为:/usr/local/lib/python2.7/dist-packages/openravepy。
$ sudo python `openrave-config --python-dir`/openravepy/_openravepy_/ikfast.py --help
运行上面可查看ikfash.py参数。
3.6 使用ikfast61.cpp求逆解
$ cp /usr/local/lib/python2.7/dist-packages/openravepy/_openravepy_/ikfast.h . $ g++ ikfast61.cpp -o ikfast -llapack -std=c++11
注
- IKFast 算法依赖于LAPACK(Linear Algebra PACKag)库,所以编译的时候要链接 liblapack.so 库;
- 输入为 3x4 矩阵(rotation 3x3, translation 3x1)
r00 r01 r02 t1 r10 r11 r12 t2 r20 r21 r22 t3 # 转换成 3x4 矩阵 r00 r01 r02 t1 r10 r11 r12 t2 r20 r21 r22 t3
生成 8 组解
$ ./ikfast 0.04071115 -0.99870914 0.03037599 0.4720009 -0.99874455 -0.04156303 -0.02796067 0.12648243 0.0291871 -0.02919955 -0.99914742 0.43451169

3.7 用正向运动学方程进行验证
上面每一组解都表示一个正确的6关节状态。注意最后一个关节ee_fixed_point,虽然类型是fixed,但它有非零(xyz, rpy),计算时也须要包含该关节。
Eigen::Isometry3d chain_getSegment_pose(const Eigen::Vector3d& xyz, const Eigen::Vector3d& rpy, const Eigen::Vector3d& axis_tag_xyz, double angle) { Eigen::AngleAxisd rollAngle(Eigen::AngleAxisd(rpy(0), Eigen::Vector3d::UnitX())); Eigen::AngleAxisd pitchAngle(Eigen::AngleAxisd(rpy(1), Eigen::Vector3d::UnitY())); Eigen::AngleAxisd yawAngle(Eigen::AngleAxisd(rpy(2), Eigen::Vector3d::UnitZ())); Eigen::Isometry3d F_parent_jnt = Eigen::Isometry3d::Identity(); F_parent_jnt.rotate(yawAngle * pitchAngle * rollAngle); Eigen::Vector3d _axis = F_parent_jnt.rotation() * axis_tag_xyz; Eigen::Vector3d axis = _axis / _axis.norm(); Eigen::Isometry3d joint_pose = Eigen::Isometry3d::Identity(); joint_pose.rotate(Eigen::AngleAxisd(angle, axis)); joint_pose.pretranslate(xyz); Eigen::Isometry3d f_tip = Eigen::Isometry3d::Identity(); f_tip.rotate(F_parent_jnt.rotation()); Eigen::Isometry3d result = joint_pose * f_tip; return result; } void verify_ur5() { double angle0[6] = {-2.508279331875612, -3.013057342196758, 1.224580428339185, 1.736242820305415, 0.593205998702227, 0.072539035191919}; std::vector<double*> angles; angles.push_back(angle0); int at = 0; for (std::vector<double*>::const_iterator it = angles.begin(); it != angles.end(); ++ it, at ++) { double* angle = *it; char buf[128]; SDL_snprintf(buf, sizeof(buf), "%.15f, %.15f, %.15f, %.15f, %.15f, %.15f", angle[0], angle[1], angle[2], angle[3], angle[4], angle[5]); SDL_Log("[%i/%i]%s---", at, (int)angles.size(), buf); result = Eigen::Isometry3d::Identity(); // SDL_Log("Joint: shoulder_pan_joint"); Eigen::Vector3d rpy = Eigen::Vector3d(0.0, 0.0, 0.0); Eigen::Vector3d xyz = Eigen::Vector3d(0.0, 0.0, 0.089159); Eigen::Vector3d axis_tag_xyz = Eigen::Vector3d(0, 0, 1); result = result * chain_getSegment_pose(xyz, rpy, axis_tag_xyz, angle[0]); // SDL_Log("Joint: shoulder_lift_joint"); rpy = Eigen::Vector3d(0.0, 1.5707963267948966, 0.0); xyz = Eigen::Vector3d(0.0, 0.13585, 0.0); axis_tag_xyz = Eigen::Vector3d(0, 1, 0); result = result * chain_getSegment_pose(xyz, rpy, axis_tag_xyz, angle[1]); // SDL_Log("Joint: elbow_joint"); rpy = Eigen::Vector3d(0.0, 0.0, 0.0); xyz = Eigen::Vector3d(0.0, -0.1197, 0.425); axis_tag_xyz = Eigen::Vector3d(0, 1, 0); result = result * chain_getSegment_pose(xyz, rpy, axis_tag_xyz, angle[2]); // SDL_Log("Joint: wrist_1_joint"); rpy = Eigen::Vector3d(0.0, 1.5707963267948966, 0.0); xyz = Eigen::Vector3d(0.0, 0.0, 0.39225); axis_tag_xyz = Eigen::Vector3d(0, 1, 0); result = result * chain_getSegment_pose(xyz, rpy, axis_tag_xyz, angle[3]); // SDL_Log("Joint: wrist_2_joint"); rpy = Eigen::Vector3d(0.0, 0.0, 0.0); xyz = Eigen::Vector3d(0.0, 0.093, 0.0); axis_tag_xyz = Eigen::Vector3d(0, 0, 1); result = result * chain_getSegment_pose(xyz, rpy, axis_tag_xyz, angle[4]); // SDL_Log("Joint: wrist_3_joint"); rpy = Eigen::Vector3d(0.0, 0.0, 0.0); xyz = Eigen::Vector3d(0.0, 0.0, 0.09465); axis_tag_xyz = Eigen::Vector3d(0, 1, 0); result = result * chain_getSegment_pose(xyz, rpy, axis_tag_xyz, angle[5]); // SDL_Log("Joint: ee_fixed_joint"); rpy = Eigen::Vector3d(0.0, 0.0, 1.5707963267948966); xyz = Eigen::Vector3d(0.0, 0.0823, 0.0); axis_tag_xyz = Eigen::Vector3d(0, 0, 1); result = result * chain_getSegment_pose(xyz, rpy, axis_tag_xyz, 0); std::stringstream ss; ss << "total result's matrix = \n"; ss << result.matrix(); SDL_Log("%s", ss.str().c_str()); } }
以下是执行后的output输出,可看到计算出的result就是执行“./ikfast”时的参数。
INFO: [0/1]-2.508279331100000, -3.013057342000000, 1.224580428000000, 1.736242820000000, 0.593205998000004294967295, 0.072539035000000--- INFO: total result's matrix = 0.0407112 -0.998709 0.0303765 0.472003 -0.998745 -0.041563 -0.0279603 0.126479 0.0291867 -0.0292001 -0.999147 0.434511 0 0 0 1
四、生成moveit_ikfast_plugin功能包
$ cd ~/moveit_ws/src $ export MOVEIT_IK_PLUGIN_PKG="moveit_ikfast_plugin" $ catkin_create_pkg "$MOVEIT_IK_PLUGIN_PKG"
上面语句的功能是在~/moveit_ws/src添加功能包moveit_ikfast_plugin。下面填充功能包内容,假设成功world-->ee_link的规划组叫“robot_arm”。
$ cd ~/moveit_ws/src/moveit_ikfast_plugin $ export MYROBOT_NAME="ur5" $ export PLANNING_GROUP="robot_arm" $ export IKFAST_OUTPUT_PATH=~/moveit_ws/src/ur_description/urdf/ikfast61.cpp $ rosrun moveit_kinematics create_ikfast_moveit_plugin.py "$MYROBOT_NAME" "$PLANNING_GROUP" "$MOVEIT_IK_PLUGIN_PKG" "world" "ee_link" "$IKFAST_OUTPUT_PATH"
成功后,会在~/moveit_ws/src/moveit_ikfast_plugin/src生成两个文件。
- ur5_robot_arm_ikfast_moveit_plugin.cpp。创建一个可用在moveit的,针对“ur5”模型、“robot_arm”规划组,派生于KinematicsBase的运动学求解器。
- ur5_robot_arm_ikfast_solver.cpp。它的内容就是ikfast61.cpp。
执行catkin_make后,“rospack find moveit_ikfast_plugin”可得到moveit_ikfast_plugin功能包的有效路径。