
- 误差阀值eps。来自TRAC_IKKinematicsPlugin::searchPositionIK(...)栈内变量“double epsilon = 1e-5”,是个不能改的参数。
- 逆解溢出时间maxtime,单位秒。来自param:/robot_description_kinematics/robot_arm/kinematics_solver_timeout。中间“robot_arm”是规划组名称。该param定义在文件kinematics.yaml。建议值或许是0.5,即default_ik_timeout_的默认值。
- solvetype不是Speed时,trac_ik会用足maxtime,从而求出多个可能的逆解。Speed时,找到一个逆解就结束。
- 由delta_twist算出的error[0]将用于计算后面导函数误差
,它应该正确、灵敏反应出不同
值时的变化。一旦不正确或不灵敏,会影响nlopt的收敛速度,结果造成时间溢出,逆解失败
- errors是个std::vector,单元类型std::pair<double, uint>,first是误差,用于“std::sort(errors.begin(), errors.end())”排序,second则是该逆解在solutions的索引。solutions[errors[0].second]则是基于“err”排序后,得到的最优逆解。
trac_ik和Orocos KDL类似,也是一种基于数值解的机器人运动学求解器,但是在算法层面进行了很多改进。具体来说,KDL的收敛算法基于牛顿方法,在存在关节限制的情况下效果不佳,但这在许多机器人平台上很常见。trac_ik同时运行两个IK实现。一个是对KDL基于牛顿的收敛算法的简单扩展,该算法通过随机跳跃检测和减轻由于联合限制引起的局部最小值。第二种是SQP非线性优化方法(Sequential Quadratic Programming,参考“序列二次规划——SQP“),它使用更好地处理关节限制的拟牛顿方法。默认情况下,当两个算法中的任何一个收敛到答案时,IK搜索会立即返回。不论成功率还是计算时间,trac_ik比KDL都要好很多。
编程实现上,trac_ik的两个IK算法独立运行在两个并发线程:TRAC_IK::runKDL和TRAC_IK::runNLOP
class TRAC_IK
{
private:
// 误差阀值eps。
// 来自TRAC_IKKinematicsPlugin::searchPositionIK(...)栈内变量“double epsilon = 1e-5”,是个不能改的参数。
double eps;
// 逆解溢出时间maxtime,单位秒。
double maxtime;
// 可选{ Speed, Distance, Manip1, Manip2 },默认使用Speed
SolveType solvetype;
std::unique_ptr<NLOPT_IK::NLOPT_IK> nl_solver;
std::unique_ptr<KDL::ChainIkSolverPos_TL> iksolver;
// solutions, erros共同存储着逆解出的结果
std::vector solutions;
std::vector<std::pair<double, uint> > errors;
};
inline bool TRAC_IK::runKDL(const KDL::JntArray &q_init, const KDL::Frame &p_in)
{
return runSolver(*iksolver.get(), *nl_solver.get(), q_init, p_in);
}
inline bool TRAC_IK::runNLOPT(const KDL::JntArray &q_init, const KDL::Frame &p_in)
{
return runSolver(*nl_solver.get(), *iksolver.get(), q_init, p_in);
}NLOPT_IK::NLOPT_IK和KDL::ChainIkSolverPos_TL的构造时机都是在IKConstraintSampler::callIK,即要执行一次把笛卡儿位姿逆解关节状态时。此次逆解一旦结束,它们立即被销毁。
可认为这两线程独立运行,运行中没有需要同步的变量。
一、TRAC_IK::CartToJnt
TRAC_IK::CartToJnt是trac_ik提供的由笛卡儿位姿逆解关节状态的api。
- @q_init[IN]:牛顿迭代初值。
- @p_in[IN]:要求解的笛卡儿位姿
- @q_out[OUT]:存储着逆解出的关节状态
- @_bounds[IN]:不是关节范围限制,用于定义位姿误差delta_twist中6个字段的归0阀值。在索引i字段,值“std::abs(delta_twist[i]) <= std::abs(_bounds[i])“时,强制把该误差字段置为0。也就是说,让caller不改eps前提下,有机会可以加大某些分量的允许误差。默认0。
返回值是个整数。小于0表示没找到,大于0表示找到的逆解数。不会出现0。参数@q_out存储着那个最优逆解。
int TRAC_IK::CartToJnt(const KDL::JntArray &q_init, const KDL::Frame &p_in, KDL::JntArray &q_out, const KDL::Twist& _bounds)
{
...
start_time = boost::posix_time::microsec_clock::local_time();
nl_solver->reset();
iksolver->reset();
solutions.clear();
errors.clear();
bounds = _bounds;
task1 = std::thread(&TRAC_IK::runKDL, this, q_init, p_in);
task2 = std::thread(&TRAC_IK::runNLOPT, this, q_init, p_in);
task1.join();
task2.join();
if (solutions.empty())
{
q_out = q_init;
return -3;
}不是Speed类型时,过程中可能找到数个逆解,solutions存储着这些逆解。这里有个问题,最终要返回只是一个逆解,如何判定solutions中哪个逆解最好呢?,——把算出的各逆解减去q_init,求出各分量差的平方和,正如“err = TRAC_IK::JointErr(q_init, q_out)”算出的err。errors中的first就是这个err,second则是该逆解对应的在solutions中的索引。
switch (solvetype)
{
case Manip1:
case Manip2:
std::sort(errors.rbegin(), errors.rend()); // rbegin/rend to sort by max
break;
default:
std::sort(errors.begin(), errors.end());errors类型是std::vector,不是自动排序容器,std::sort执行着把errors按first排序。排序后[0]存储着err最小的逆解,也就是最终要返回的。
break; } q_out = solutions[errors[0].second];
经过排序,erros[0]的err最小,erros[0].second指向这个逆解在solutions中索引。
return solutions.size(); }
二、TRAC_IK::runSolver
两个IK都会执行runSolver,可认为runSolver就是这两个线程的线程函数。
template<typename T1, typename T2>
bool TRAC_IK::runSolver(const std::string& tag, T1& solver, T2& other_solver,
const KDL::JntArray &q_init,
const KDL::Frame &p_in)
{
...
while (TRUE) {
...
int RC = solver.CartToJnt(seed, p_in, q_out, bounds);两个IK需要实现自已的CartToJnt(...),它们的区别全在这个函数。“RC >= 0”表示此次solver.CarToJnt成功得到了一个逆解,存储在变量q_out。
if (RC >= 0)
{
switch (solvetype)
{
case Manip1:
case Manip2:
normalize_limits(q_init, q_out);
break;
default:
normalize_seed(q_init, q_out);
break;
}
mtx_.lock();
if (unique_solution(q_out))
{不是Speed类型时,一次逆运动学求解可能找到数个逆解。q_out是此轮新找到的逆解,unique_solution(q_out)用于判断这个新逆解值是否是个新值(独一无二,已得出的逆解中不存在),true表示是一个新值。接下,一是把这个新值放入solutions。二是算出可用于比较的该逆解优劣的误差(err),放入errors。
errors是个std::vector,单元类型std::pair<double, uint>,first是误差,用于“std::sort(errors.begin(), errors.end())”排序,second则是该逆解在solutions的索引。solutions[errors[0].second]则是基于“err”排序后,得到的最优逆解。
两个线程都要执行TRAC_IK::runSolver,它们有可能同时修改共享变量solutions、errors,因而修改它们须要加互斥锁mtx_。
solutions.push_back(q_out);
uint curr_size = solutions.size();
errors.resize(curr_size);
mtx_.unlock();
double err, penalty;
switch (solvetype)
{
case Manip1:
...
break;
case Manip2:
...
break;
default:
err = TRAC_IK::JointErr(q_init, q_out);
break;
}
mtx_.lock();
errors[curr_size - 1] = std::make_pair(err, curr_size - 1);
}
mtx_.unlock();
}
if (!solutions.empty() && solvetype == Speed) {
break;一个IK的solver.CartToJnt(...)找到逆解后,会把逆解放入solutions。当另外一个IK运行到这里,发现solutions非空,就break出while,从而退出自个线程。
} ... } ... }
一个IK找到逆解后,如何通知另外一个IK线束线程?——在两个IK都会执行的TRAC_IK::runSolver,一个IK找到逆解后,会把逆解放入TRAC_IK::solutions。当另外一个IK运行检测solutions.empty(),发现非空,就退出线程。
三、TRAC_IK::runKDL
运行着类似KDL的牛顿迭代算法。在runKDL,核心操作是调用ChainIkSolverPos_TL.CartToJnt(...)。
class ChainIkSolverPos_TL
{
public:
int CartToJnt(const KDL::JntArray& q_init, const KDL::Frame& p_in, KDL::JntArray& q_out, const KDL::Twist bounds = KDL::Twist::Zero());
private:
KDL::ChainIkSolverVel_pinv vik_solver;
KDL::ChainFkSolverPos_recursive fksolver;
};3.1 执行逻辑
牛顿迭代初值seed赋值给q_init。以q_init为参数调用ChainIkSolverPos_TL::CartToJnt。“KDL:运动学求解器”中3公式已大致描述了逻辑。
- q_init赋值给q_out。
- fksolver.JntToCart(q_out, f)。用正向运动学方程算出此时末端关节位姿
,存储在f。
- delta_twist = diffRelative(p_in, f)。算出此时位姿和期望位姿p_in间的误差delta_twist。注意,此时的delta_twist不是公式(3)中的
,而是一个可以和eps比较的Twist,详细见下面的“KDL::diffRelative”。
- 如果delta_twist小于误差阀值eps,认为求逆解成功,返回1。否则进入步骤5。
- delta_twist = diff(f, p_in)。算出的delta_twist就是公式(3)中的
- vik_solver.CartToJnt(q_out, delta_twist, delta_q)。求公式(3)中的状态增量
,结果放在delta_q。
- Add(q_out, delta_q, q_curr)。等价执行“q_curr = q_out + delta_q”。即q_curr存储着公式(3)的计算结果。
- 有一些判断逻辑,总的来说是把q_curr赋值给q_out。然后进入步骤2。
四、TRAC_IK::runNLOPT
NLopt是Nonlinear optimization的缩写,参考:NLopt--非线性优化--原理介绍及使用方法。
在runNLOPT,核心操作是调用NLOPT_IK::CartToJnt(...)。
<trac_ik>/nlopt_ik.hpp
------
enum OptType { Joint, DualQuat, SumSq, L2 };
class NLOPT_IK
{
public:
int CartToJnt(const KDL::JntArray& q_init, const KDL::Frame& p_in, KDL::JntArray& q_out, const KDL::Twist bounds = KDL::Twist::Zero(), const KDL::JntArray& q_desired = KDL::JntArray());
private:
OptType TYPE; // 固定使用NLOPT_IK::SumSq
nlopt::opt opt; // 一个封装了nlopt功能的C++类
};nlopt::opt是封装了nlopt功能的C++类,定义和实现都在nlopt.hpp。nlopt.hpp由nlopt-in.hpp自动生成。
4.1 执行逻辑
创建NLOPT_IK对象。期间会构造nlopt::opt对象opt,以下是opt构造函数中逻辑。
- 固定使用LD_SLSQP非线性优化算法。
- opt.set_xtol_abs(tolerance[0])。设置优化结束条件,tolerance[0]值是boost::math::tools::epsilon<float>()。
- TYPE值是SumSq。opt.set_min_objective(minfuncSumSquared, this)。
牛顿迭代初值seed赋值给q_init。以q_init为参数调用NLOPT_IK::CartToJnt。
- opt.set_maxtime(maxtime)。
- targetPose = p_in。p_in是client希望逆解的位姿。
- opt.set_lower_bounds(artificial_lower_limits)。“artificial_lower_limits[i] = std::max(lb[i], best_x[i] - 2 * M_PI)”。artificial_lower_limits[i]存储着q[i]下限。lb[i]是urdf中设置是索引i关节角度下限,那best_x[i] - 2 * M_PI是啥概念?——可认为best_x就是q_init,从物理上说,下次最多转360度,所以下一次停在的角度不可能小于best_x[i] - 2 * M_PI。由于urdf一般会限制关节角度范围,导致不大可能360度都可用,std::max后的值时往往等于lb[i]。
- opt.set_upper_bounds(artificial_upper_limits)。
- opt.optimize(x, minf)。
- 如果步骤5逆解失败,时间也没溢出,那进入while循环,在每轮循环,随机生成一个q_in,记为变量x,调用opt.optimize(x, minf)执行nlopt优化。
- 能到这里,至少或时间溢出,或逆解成功。如果是逆解成功,best_x存储着求解出的q,把结果赋值给q_out,
在nlopt约束方面,有上、下边界约束,没有不等式、等式约束。
一次NLOPT_IK::CartToJnt执行至少一次nlopt优化。执行多次的条件是第一次没有求出逆解,时间上也没有超过溢出时间。执行后续优化时,除了初始参数x、溢出时间,其它参数和第一次一样。对初始参数x,来自一个随机生成的q_in。
4.2 minfuncSumSquared
目前trac_ik写死了TYPE=SumSq,对应使用的极小值函数是minfuncSumSquared。
double minfuncSumSquared(const std::vector<double>& x, std::vector<double>& grad, void* data)
{
// Auxilory function to minimize (Sum of Squared joint angle error
// from the requested configuration). Because we wanted a Class
// without static members, but NLOpt library does not support
// passing methods of Classes, we use these auxilary functions.
NLOPT_IK *c = (NLOPT_IK *) data;
std::vector<double> vals(x);
double jump = boost::math::tools::epsilon<float>();
double result[1];
c->cartSumSquaredError(vals, result);输入参数x是此刻在用的关节状态。
jump趋于0,将作为。示例:1.1920928955078125e-07。
cartSumSquaredError算出位姿误差的级小值,具体数值是误差中6个分量的平方和。
if (!grad.empty())
{
double v1[1];
for (uint i = 0; i < x.size(); i++)
{
double original = vals[i];
vals[i] = original + jump;
c->cartSumSquaredError(vals, v1);
vals[i] = original;
grad[i] = (v1[0] - result[0]) / (2.0 * jump);jump是,(v1[0] - result[0])是因为第i个关节值有了个
微小变化后,对应误差发生的变化量
,即第i个关节对误差的贡献率。grad[i]是导函数
的计算结果。此轮算出的grad将决定下一轮用的是什么q_in。
}
}
return result[0];
}
void NLOPT_IK::cartSumSquaredError(const std::vector<double>& x, double error[])
{
// Actual function to compute Euclidean distance error. This uses
// the KDL Forward Kinematics solver to compute the Cartesian pose
// of the current joint configuration and compares that to the
// desired Cartesian pose for the IK solve.
if (aborted || progress != -3)
{
opt.force_stop();
return;
}
KDL::JntArray q(x.size());
for (uint i = 0; i < x.size(); i++)
q(i) = x[i];
int rc = fksolver.JntToCart(q, currentPose);currentPose是关节状态是q时,末端关节的笛卡儿位姿。
if (rc < 0)
ROS_FATAL_STREAM("KDL FKSolver is failing: " << q.data);
if (std::isnan(currentPose.p.x()))
{
ROS_ERROR("NaNs from NLOpt!!");
error[0] = std::numeric_limits<float>::max();
progress = -1;
return;
}
KDL::Twist delta_twist = KDL::diffRelative(targetPose, currentPose);targetPose是client希望到达的pose。while中每一次优化时,值不变。delta_twist用的类型是KDL::Twist,但语义不是速度,而是位姿变换量,也称位姿误差。位姿变化量有6个double分量,恰好Twist有6个double字段,于是就把xyz放在Twist.vel,“rpy”在Twist.rot,应该不是欧拉角rpy,但应该是和旋转有关的3个分量,暂用加引号的“rpy”表示。delta_twist表示targetPose和currentPose之间的变换量,方向是从currentPose到targetPose,还是反过来,不能确定。具体到6个分量,假设以“e_”为前辍的,是类型由KDL::Frame变化到Eigen::Isometry3d、值不变的变量,那xyz值相当于取“e_targetPose.inverse() * e_currentPose”的平移部分。至于怎么算“rpy”,没有理解。
当两个输入位姿存在不同旋转时,diffRelative计算出的平移差不是两个输入位姿的平移对应分量的差值,会有一个微小变动。举个例子,以x、y、z对应三分量相减的平移差是[0.003370, 0.002000, 0.000119],diffRelative算出的平移差会是[0.002651, 0.002000, 0.002084]。
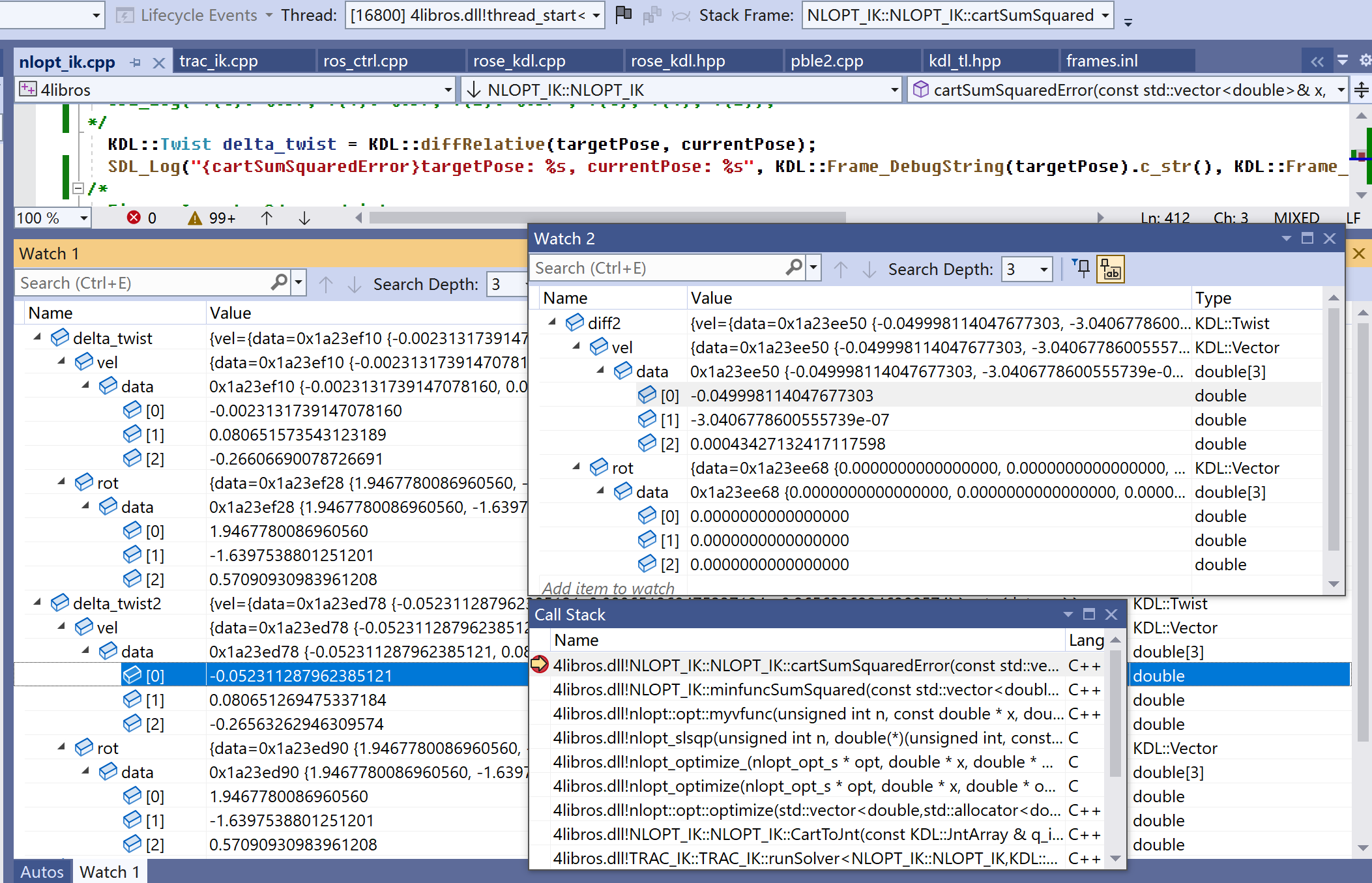
diffRelative算出的delta_twist中,可认为targetPose中的x分量只影响对应的delta_twist.vel(0),即使对其它分量有影响,影响值也在0.0005以内。让看个示例。
- currentPose: {p:(-0.00028, 0.04860, 0.01189), M:(2.15437, -1.36582, 2.55894)}
- targetPose: {p:(-0.00029, -0.07871, 0.25905), M:(-0.77001, -0.00623, -3.13555)}
给targetPose的x增加“-0.05”,其它不变,记为targetPose2。
- targetPose2: {p:(-0.05028, -0.07871, 0.25905), M:(-0.77001, -0.00623, -3.13555)}
然后分别计算它们和同一个currentPose的diffRelavite。
- delta_twist = KDL::diffRelative(targetPose, currentPose);
- delta_twist2 = KDL::diffRelative(targetPose2, currentPose);
图1的Watch1显示了delta_twist和delta_twist2,Watch2中diff2则来自“delta_twist2 - delta_twist”,即显示了这两个Twist差值。由diff2可看到,两次diffRelative,rot部分没变化,vel.x保持“原x差值”-0.05,vel.y差值可认为0,vel.z差值在0.0005以内。
for (int i = 0; i < 6; i++)
{
if (std::abs(delta_twist[i]) <= std::abs(bounds[i]))
delta_twist[i] = 0.0;
}
error[0] = KDL::dot(delta_twist.vel, delta_twist.vel) + KDL::dot(delta_twist.rot, delta_twist.rot);误差中6个分量的平方和做为目标函数的值,即。也就是说,优化是要算出位姿误差的极小值,具体数值是误差中各分量的平方和。
变量bounds称为改0阈值,作用见下文的“只要满足平移(position_ik_=true)”。它是caller调用TRAC_IK::CartToJnt(...)这个api时传下的参数,用于判断出该分量上的误差<=它时,强行改为0。换句话说,让caller不改eps前提下,有机会可以加大某些分量的允许误差。有了bounds[0]可自设定x归0误差,加上上面“targetPose.x只影响delta_twist.x”这个结论,有人会想到这么一种可能:caller在设置要逆解的位姿时,任意指定一个x,其它yzrpy则是正确的,然后再把这里bounds[0]设为足够大,即不管diffRelative算出的delta_twist[0]是何值,到这里delta_twist[0]都归到0,是不是就能做到不用设对x就可算出逆解?——不行。由delta_twist算出的error[0]将用于计算后面导函数误差,它应该正确、灵敏反应出不同
值时的变化。一旦不正确或不灵敏,会影响nlopt的收敛速度,结果造成时间溢出,逆解失败。举个例子,第i次迭代的关节状态是
,算出的error[0]是
,下一次
时算出的误差是
,值上
小于
,即误差变小了,但如果加上各自的delta_twist[0],
其实大于
!一旦出现这情况,基本可认定此次不可能求出逆解。
if (KDL::Equal(delta_twist, KDL::Twist::Zero(), eps))
{
progress = 1;
best_x = x;
逆解成功。preogress置为1,best_x存储着逆解出的关节状态。
return;
}
}
五、只要满足平移(position_ik_=true)
位姿有6个变量,3个平移和3个旋转,求逆解时,需要同时满足这6个变量。在一些场合,只须要满足平移,可忽略旋转。track_ik考虑到这种需求,用了一个叫position_ik_变量,是true时,表示此次求逆解只须满足平移。
5.1 误差改0阈值:KDL::Twist bounds
一旦只要满足平移时,调用者会把bounds的旋转部分阈值置为最大数值。
bool TRAC_IKKinematicsPlugin::searchPositionIK(const geometry_msgs::Pose &ik_pose, ...)
{
...
KDL::Twist bounds = KDL::Twist::Zero();
if (position_ik_)
{
bounds.rot.x(std::numeric_limits<float>::max());
bounds.rot.y(std::numeric_limits<float>::max());
bounds.rot.z(std::numeric_limits<float>::max());
}
...
}bounds不是各变量的容许误差。它的作用是,当变量的误差小于它时,就改为0。置0,是希望达到这么个目标,让导数变成0,相当于发生在该变量上的对
没有贡献。上面把bounds的旋转部分阈值设置为最大数值,意味着不论roll、pitch、yaw误差是多少,误差都要改为是0
5.2 只需要满足平移时的ChainIkSolverPos_TL
trac_ik会同时运行ChainIkSolverPos_TL和NLOPT_IK这两个ik,测试下来,只需要满足平移时,NLOPT_IK能正常工作,也就是说,能正确找到个只须满足平移的逆解,但ChainIkSolverPos_TL不行。深入代码,对如何使用bounds,ChainIkSolverPos_TL只是做了个判断,当该分量上比较下来的误差小于bounds,就改为0。这个改为0后,只是用在最后和容许误差比较时,并没有体现在导数上,即雅可比矩阵。
在NLOPT_IK,bounds发生作用是在cartSumSquaredError,当该分量上比较下来的误差小于bounds,对应的delta_twist[i]就改为0。这6个分量delta_twist[i]平方和可认为是
对
导数是放在雅可比矩阵,于是想到一种方法,在计算雅可比矩阵时,让和旋转三变量相关的总是0。
<orocos_kdl>/src/chainjnttojacsolver.cpp
------
int ChainJntToJacSolver::JntToJac(const JntArray& q_in, Jacobian& jac, int seg_nr)
{
.....
if (position_ik_) {算出雅可比矩阵(jac)后,如果只需满足平移,调用ZeroOrientation(),把旋转相关的3行置0。
jac.ZeroOrientation();
}
return (error = E_NOERROR);
}
<orocos_kdl>/src/jacobian.cpp
------
void Jacobian::ZeroOrientation()
{
// set line[3..5] to zero
int cols = data.cols();
for (int row = 3; row < 6; row ++) {
for (int col = 0; col < cols; col ++) {
data(row, col) = 0;变量data的类型Eigen::Matrix<double,6,Eigen::Dynamic>,是个6行矩阵。从上到下,依次是平移x、y、z,旋转roll、pitch、yaw。
} } }
Jacobian::ZeroOrientation是个新增函数。