
- 适配器必须实现基类PlanningRequestAdapter的虚操作adaptAndPlan#3,它的第一个参数是个函数,对这个函数,传给组中前N-2个的是callAdapter2,第N-1个callAdapter1,最后一个则是callPlannerInterfaceSolve。
- 对callAdapter1和callAdapter2,顾名思义,它们的作用是调用下一个适配器。区别是callAdapter2调用该适配器的adaptAndPlan#3方法,callAdapter1则是adaptAndPlan#1。
- 规划逻辑(适配器组中适配器个数>=2)。generatePlan调用PlanningRequestAdapterChain::adaptAndPlan。2)adaptAndPlan执行callAdapter2,callAdapter2调用下一个(即第一个)适配器的adaptAndPlan#3。在adaptAndPlan#3中,因为本适配器不是组中第N-1个或最后那个,第一个参数指向的函数是callAdapter2,callAdapter2继续调用下一个适配器的adaptAndPlan#3。3)依此逻辑不断在adapter_chain_向前处理适配器,直到执行第N-1个适配器的adaptAndPlan#3,此时第一个参数指向的函数是callAdapter1,callAdapter1继续调用最后一个适配器的adaptAndPlan#1。在这个adaptAndPlan#1,参数planner指向的函数会执行ompl规划器ModelBasedPlanningContext::solve(...)。4)执行完ModelBasedPlanningContext::solve后,由于各适配器的adaptAndPlan#3还被逆序压在Call Stack,参考图2,于是接下就是逆序执行各适配器callAdapter1或callAdapter2后的那些操作。作为特殊情况,如果组中适配器只有一个,那不会调用到callAdapter2。
- 执行PlanningPipeline::generatePlan后,规划出的路径存放在MotionPlanResponse::trajectory_,类型是robot_trajectory::RobotTrajectory。
路径规划,也称运动规划、轨迹规划,是给定一个目标关节状态或目标位姿
,找到一条从机器人当前关节状态
到
路径。指定的是目标位姿时,期间会用逆运动学求解器(IK)逆解出关节状态。
一、PlanningPipeline
PlanningPipeline::generatePlan是执行路径规划的顶层函数,参数req存放着,参数res要存放规划出的路径。既然要调用generatePlan方法,首先说下如何得到PlanningPipeline对象。系统创建的PlanningPipeline集中放置在moveit_cpp::MoveItCpp,这可说是顶层class,具体是它的planning_pipelines_成员。
class MoveItCpp
{
private:
std::map<std::string, planning_pipeline::PlanningPipelinePtr> planning_pipelines_;
};planning_pipelines_是个std::map,first是字符串表示的标识,second是对应该标识创建的PlanningPipeline。当中有个特殊标识,值来自param变量“/move_group/default_planning_pipeline”,称它为默认PlanningPipeline。当前launcher这个值是空,根据moveit_ros_move_group__move_group取出该值时代码,空可能是不允许的。虽然planning_pipelines_是个std::map,但是很多时候整系统可能也就这么个默认PlanningPipeline。这个PlanningPipeline如何被要执行路径规划的对象得到,这分两种情况,一是关节、位姿规划时,二是抓取、放置时。注:笛卡儿规划没有路径规划阶段。
第一类:关节、位姿规划
顶层是class MoveGroupMoveAction的executeMoveCallbackPlanOnly或executeMoveCallbackPlanAndExecute,内中通过方法resolvePlanningPipeline(const std::string& pipeline_id)得到PlanningPipeline。其中参数pipeline_id是表示要获取moveit_cpp::MoveItCpp中哪个PlanningPipeline。是空时,得到的就是默认PlanningPipeline。因为pipeline_id来自于goal->request.pipeline_id,也就是说,client填的request.pipeline_id是空时,将使用默认PlanningPipeline。
此种情况下,是在ActionServerThread线程执行PlanningPipeline::generatePlan。
第二类:抓取、放置
顶层是class ManipulationPipeline,它的Start方法会运行新线程processingThread。在processingThread,有三个3个stages_,最后一个stage是PlanStage。PlanStage有个PlanningPipelinePtr类型的成员planning_pipeline_,通过它调用PlanningPipeline::generatePlan。这个planning_pipeline_就是默认PlanningPipeline。
虽然ManipulationPipeline和PlanningPipeline都含有Pipeline字符串,但它们可说没关系。此种情况下,是在新建的processingThread线程执行PlanningPipeline::generatePlan,不是在处理action的ActionServerThread。
二、PlanningPipeline::generatePlan
在深入PlanningPipeline::generatePlan前,先看下规划请求适配器基类PlanningRequestAdapter中三个版本的adaptAndPlan方法,知道文中提到的adaptAndPlan#1、adaptAndPlan#3是指哪两个函数。
第一个版本,缩写为“adaptAndPlan#1”。规划过程中只有callAdapter1会调用它,而且只一次。它把callPlannerInterfaceSolve作为下一个适配器adaptAndPlan#1方法的第一个参数。
bool PlanningRequestAdapter::adaptAndPlan(const planning_interface::PlannerManagerPtr& planner,
const planning_scene::PlanningSceneConstPtr& planning_scene,
const planning_interface::MotionPlanRequest& req,
planning_interface::MotionPlanResponse& res,
std::vector<std::size_t>& added_path_index) const
{
return adaptAndPlan(std::bind(&callPlannerInterfaceSolve, planner.get(), std::placeholders::_1, std::placeholders::_2,
std::placeholders::_3),
planning_scene, req, res, added_path_index);
}第二个版本,规划过程不会调用到这个版本。
bool PlanningRequestAdapter::adaptAndPlan(const planning_interface::PlannerManagerPtr& planner,
const planning_scene::PlanningSceneConstPtr& planning_scene,
const planning_interface::MotionPlanRequest& req,
planning_interface::MotionPlanResponse& res) const
{
std::vector<std::size_t> dummy;
return adaptAndPlan(planner, planning_scene, req, res, dummy);
}第三个版本,适配器必须重载并实现的版本。缩写为“adaptAndPlan#3”。
virtual bool adaptAndPlan(const PlannerFn& planner, const planning_scene::PlanningSceneConstPtr& planning_scene, const planning_interface::MotionPlanRequest& req, planning_interface::MotionPlanResponse& res, std::vector<std::size_t>& added_path_index) const = 0;
在函数声明上,adaptAndPlan#1和adaptAndPlan#3的差别只在第一个参数,#1是PlannerManager对象,#3则是一个函数。对这个函数,后面可知道,传给组中前N-2个适配器的是callAdapter2,第N-1个callAdapter1,最后一个则是callPlannerInterfaceSolve。

图1显示了generatePlan大致流程,为直观会结合一个示例进行描述。示例中有5个规划请求适配器,按着以下的次序添加到规划请求适配器组(adapter_chain_)。
- default_planner_request_adapters/AddTimeParameterization
- default_planner_request_adapters/FixWorkspaceBounds
- default_planner_request_adapters/FixStartStateBounds
- default_planner_request_adapters/FixStartStateCollision
- default_planner_request_adapters/FixStartStatePathConstraints
参数req存放着,参数res要存放规划出的路径。规划出的路径存放在MotionPlanResponse::trajectory_,类型是robot_trajectory::RobotTrajectory。
bool planning_pipeline::PlanningPipeline::generatePlan(const planning_scene::PlanningSceneConstPtr& planning_scene,
const planning_interface::MotionPlanRequest& req,
planning_interface::MotionPlanResponse& res,
std::vector<std::size_t>& adapter_added_state_index) const
{
adapter_added_state_index.clear();
...
bool solved = false;
try
{
if (adapter_chain_)
{
solved = adapter_chain_->adaptAndPlan(planner_instance_, planning_scene, req, res, adapter_added_state_index);adapter_chain_是适配器组,它不为nullptr,意味着为此次规划至少添加了一个规划请求适配器。正常工作时,为让得到的路点有时间戳,就须要添加能产生时间戳的适配器,必然会进这入口。
adapter_chain_->adaptAndPlan执行着具体的路径规划操作。
if (!adapter_added_state_index.empty())
{
std::stringstream ss;
for (std::size_t added_index : adapter_added_state_index)
ss << added_index << " ";
ROS_INFO("Planning adapters have added states at index positions: [ %s]", ss.str().c_str());
}
}
else
{没有为此次规划添加规划请求适配器,像调试时。结合图1,它就是没有前、后适配器,只留中间的ModelBasedPlanningContext::solve(...)。
planning_interface::PlanningContextPtr context = planner_instance_->getPlanningContext(planning_scene, req, res.error_code_); solved = context ? context->solve(res) : false; } } ... return solved && valid; }
三、PlanningRequestAdapterChain::adaptAndPlan
已确定此次规划至少添加了一个适配器,adaptAndPlan执行着具体的路径规划操作。
bool PlanningRequestAdapterChain::adaptAndPlan(const planning_interface::PlannerManagerPtr& planner,
const planning_scene::PlanningSceneConstPtr& planning_scene,
const planning_interface::MotionPlanRequest& req,
planning_interface::MotionPlanResponse& res,
std::vector<std::size_t>& added_path_index) const
{
// if there are no adapters, run the planner directly
if (adapters_.empty())
{
added_path_index.clear();
return callPlannerInterfaceSolve(planner.get(), planning_scene, req, res);
}
else
{
// the index values added by each adapter
std::vector<std::vector<std::size_t> > added_path_index_each(adapters_.size());
// if there are adapters, construct a function pointer for each, in order,
// so that in the end we have a nested sequence of function pointers that call the adapters in the correct order.
PlanningRequestAdapter::PlannerFn fn =
std::bind(&callAdapter1, adapters_.back().get(), planner, std::placeholders::_1, std::placeholders::_2,
std::placeholders::_3, boost::ref(added_path_index_each.back()));此时得到的fn指定了是用callAdapter1调起第N-1个适配器(不是最一个),调用的是它的adaptAndPlan#1方法。
for (int i = adapters_.size() - 2; i >= 0; --i) fn = std::bind(&callAdapter2, adapters_[i].get(), fn, std::placeholders::_1, std::placeholders::_2, std::placeholders::_3, boost::ref(added_path_index_each[i])); bool result = fn(planning_scene, req, res);
for内会执行N-1次fn赋值,示例就是4次。每一个fn对应让回调一次callAdapter2,即每次都是调用下一个适配器的adaptAndPlan#3方法。
执行“fn(planning_scene, req, res)”过程会涉及到较多函数,像callAdapter1、callAdapter2、callPlannerInterfaceSolve、各适配器的adaptAndPlan#3、adaptAndPlan#1,让在ompl::geometric::RRTConnect::solve入口设个断点,看下此时的Call Stack。
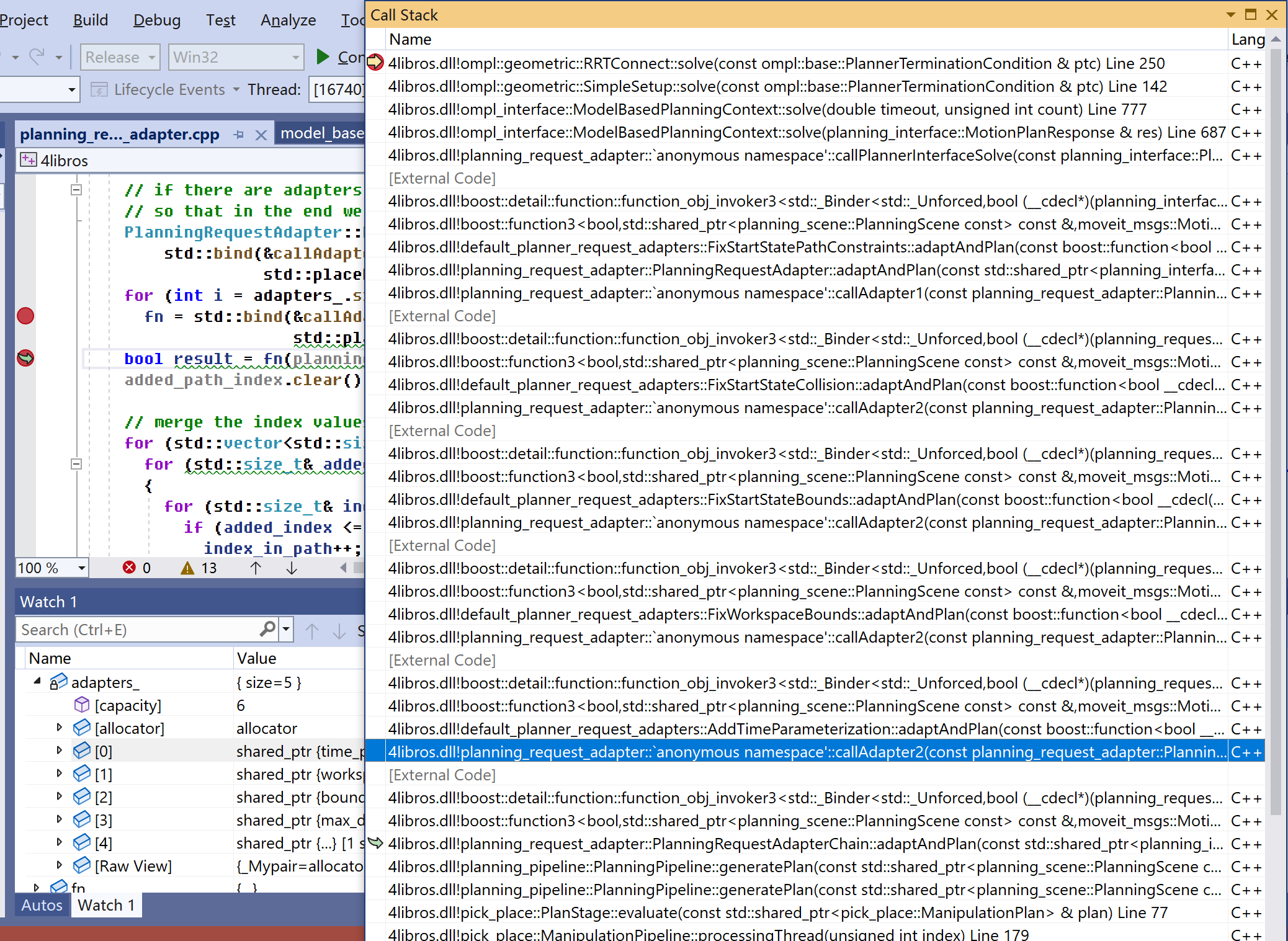
- 顶层“fn(planning_scene, req, res)”中的fn是个callAdapter2,图2中高亮显示,它将调用adapters_中下一个适配器的adaptAndPlan#3方法,此时“下一个”就是第一个,即AddTimeParameterization。
- 在AddTimeParameterization,它必须执行传给它的第一个参数planner指定的函数。这个planner也是callAdapter2,它将调用下一个适配器的adaptAndPlan#3,即FixWorkspaceBounds。
- 在FixWorkspaceBounds,它必须执行传给它的第一个参数planner指定的函数。这个planner也是callAdapter2,它将调用下一个适配器的adaptAndPlan#3,即FixStartStateBounds。
- 在FixStartStateBounds,它必须执行传给它的第一个参数planner指定的函数。这个planner也是callAdapter2,它将调用下一个适配器的adaptAndPlan#3,即FixStartStateCollision。
- 在FixStartStateCollision,它必须执行传给它的第一个参数planner指定的函数。这个planner是callAdapter1,它将调用下一个适配器的adaptAndPlan#1,即FixStartStatePathConstraints。
- 在FixStartStatePathConstraints,它必须执行传给它的第一个参数planner指定的函数。这个planner是callPlannerInterfaceSolve,它会调用ompl规划器ModelBasedPlanningContext::solve(...)。
- 执行完solve(...)后,各适配器的adaptAndPlan#3还被逆序压在Call Stack,于是接下就是逆序执行各适配器planner(...)后的那些操作。
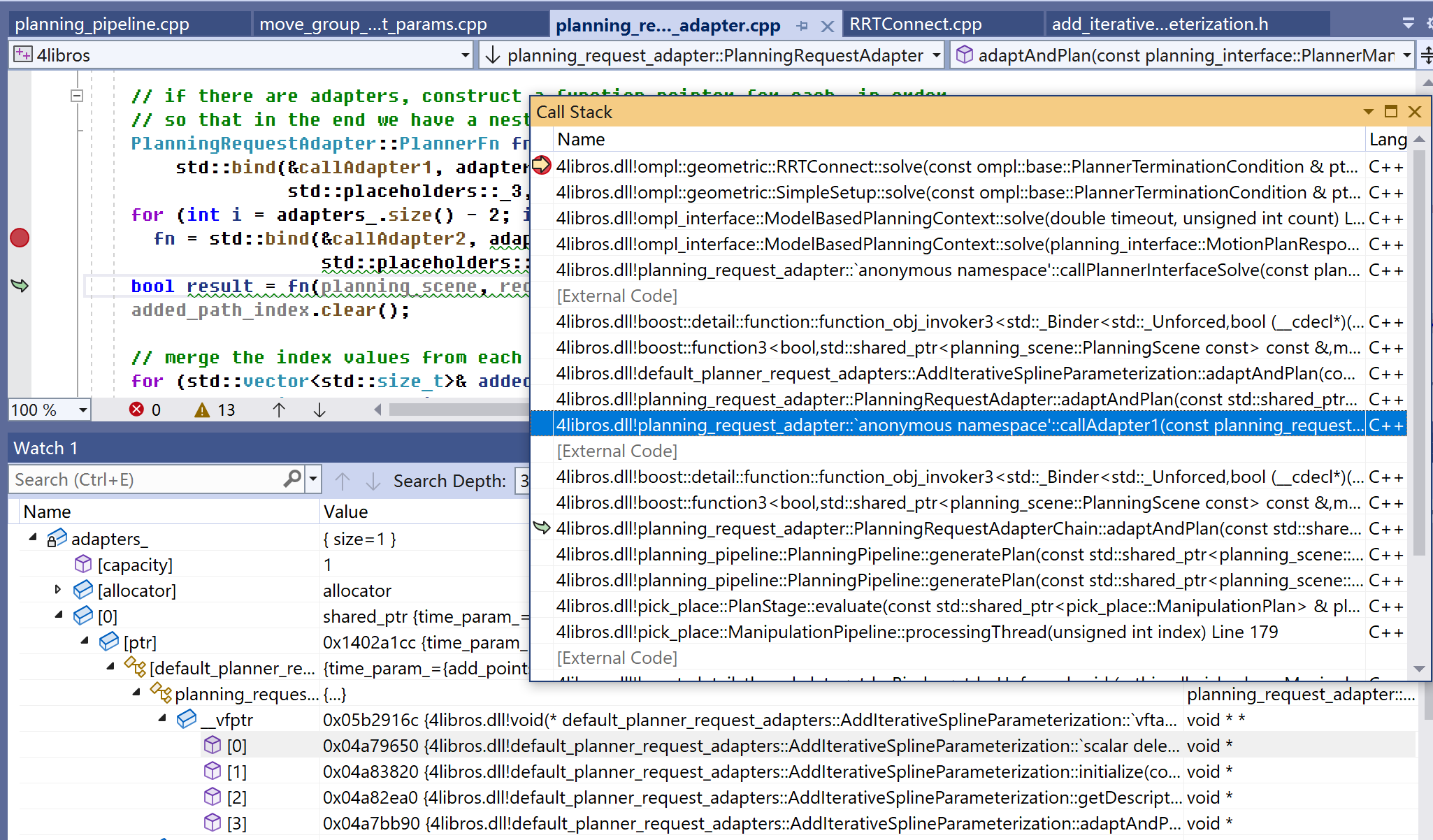
图3显示了组中只有一个“default_planner_request_adapters/AddIterativeSplineParameterization”适配器时的Call Stack。可以看到,这时不会调用到callAdapter2。
added_path_index.clear();
// merge the index values from each adapter
for (std::vector<std::size_t>& added_states_by_each_adapter : added_path_index_each)
for (std::size_t& added_index : added_states_by_each_adapter)
{
for (std::size_t& index_in_path : added_path_index)
if (added_index <= index_in_path)
index_in_path++;
added_path_index.push_back(added_index);
}
std::sort(added_path_index.begin(), added_path_index.end());
return result;
}
}
四、callPlannerInterfaceSolve、callAdapter1和callAdapter2
bool callPlannerInterfaceSolve(const planning_interface::PlannerManager* planner,
const planning_scene::PlanningSceneConstPtr& planning_scene,
const planning_interface::MotionPlanRequest& req,
planning_interface::MotionPlanResponse& res)
{
planning_interface::PlanningContextPtr context = planner->getPlanningContext(planning_scene, req, res.error_code_);
if (context)
// context->solve就是ompl路径规划器ModelBasedPlanningContext::solve。
return context->solve(res);
else
return false;
}- @adapter。下一个要调起的适配器。就adapters_集合中第N-1个适配器。
- @planner。PlannerManager对象。
- @planning_scene。PlanningScene对象。
- @req[IN]。规划请求,存储着目标关态/位姿。
- @res[OUT]。存储着规划出的路径、
bool callAdapter1(const PlanningRequestAdapter* adapter, const planning_interface::PlannerManagerPtr& planner,
const planning_scene::PlanningSceneConstPtr& planning_scene,
const planning_interface::MotionPlanRequest& req, planning_interface::MotionPlanResponse& res,
std::vector<std::size_t>& added_path_index)
{
try
{
// 调用adaptAndPlan#1
return adapter->adaptAndPlan(planner, planning_scene, req, res, added_path_index);
}
catch (std::exception& ex)
{
ROS_ERROR_NAMED("planning_request_adapter", "Exception caught executing *final* adapter '%s': %s",
adapter->getDescription().c_str(), ex.what());
added_path_index.clear();
return callPlannerInterfaceSolve(planner.get(), planning_scene, req, res);
}
}- @adapter。下一个要调起的适配器。是adapters_集合中1个到第N-2个适配器任意一个。
- @planner。PlanningRequestAdapter::PlannerFn,这是个函数。不是callAdapter1中的PlannerManager对象。
bool callAdapter2(const PlanningRequestAdapter* adapter, const PlanningRequestAdapter::PlannerFn& planner,
const planning_scene::PlanningSceneConstPtr& planning_scene,
const planning_interface::MotionPlanRequest& req, planning_interface::MotionPlanResponse& res,
std::vector<std::size_t>& added_path_index)
{
try
{
// 调用adaptAndPlan#3
return adapter->adaptAndPlan(planner, planning_scene, req, res, added_path_index);
}
catch (std::exception& ex)
{
ROS_ERROR_NAMED("planning_request_adapter", "Exception caught executing *next* adapter '%s': %s",
adapter->getDescription().c_str(), ex.what());
added_path_index.clear();
return planner(planning_scene, req, res);
}
}callAdapter1会调用adaptAndPlan#1,callAdapter2会调用adaptAndPlan#3。
四、两种编写规则
适配器编写规则
- 主要任务是实现虚操作PlanningRequestAdapter::adaptAndPlan。PlanningRequestAdapter还有另外两个版本的adaptAndPlan,它们是public方法。
- 在adaptAndPlan,如果我是前适配器,那处理完自已的事后,调用planner(planning_scene, req, res)。如果是我是后适配器,先调用planner(planning_scene, req, res),然后干自已的事。如果我前、后都有,那先干前适配器工作,然后调用planner(...),最后干后适配器工作。
- 对适配器来说,可简单认为planner(planning_scene, req, res)执行着路径规划操作:ModelBasedPlanningContext::solve(...)。
“/move_group/request_adapters”值规则。
- 先添加后适配器,再添加前适配器。
- 执行时间上,越要在后面执行的适配器越添加在apapters_的前面。