
只有Windows上的Rose-Ros才支持rivz。
一、下载官方Ros(版本:noetic)
有了Rose-Ros源码后,Ros已经能工作,但为使用rviz,以及更多第三方Ros node,还是要安装个官方Ros。Rose-Ros中的Ros版本是noetic,这里安装版本也须要是noetic。
对如何在windows安装ros,微软额外做了工作。安装也就变得简单了。网上有文章介绍如何安装,个人建议直接看Ros wiki:ROS on Windows installation。
安装有个步骤是“Using the new Windows Terminal”,个人认为可以略过,终端就用cmd。microsoft新开发的一个终端,既不是cmd、也不是powershell。我用下来,基本功能都有问题,真不明白之前都两个终端了,在上面改不好吗,偏还要再折腾。后来我不管它,依旧用cmd,没遇到有啥问题。
本机ros安装路径是c:\opt,以下“Create a ROS Command Window shortcut”阶段Ros终端命令,用的是Microsoft Visual Studio Enterprise 2022 (64-bit)
C:\Windows\System32\cmd.exe /k "C:\Program Files\Microsoft Visual Studio\2022\Enterprise\Common7\Tools\VsDevCmd.bat" -arch=amd64 -host_arch=amd64&& set ChocolateyInstall=c:\opt\chocolatey&& c:\opt\ros\noetic\x64\setup.bat
要测试安装结果,运行Ros cmd,敲入“roscore”,如果出现图1,那表示安装成功了。
1.1 现在(20250705)去下载此个官方Ros,已失败
具体是在要下载ros-noetic-desktop_full,报错
C:\Windows\System32>choco upgrade ros-noetic-desktop_full -y --execution-timeout=0 Chocolatey v2.4.3 Upgrading the following packages: ros-noetic-desktop_full By upgrading, you accept licenses for the packages. ros-noetic-desktop_full is not installed. Installing... Unable to connect to source 'https://aka.ms/ros/public': Failed to fetch results from V2 feed at 'https://ros.org/Packages()?$filter=(tolower(Id)%20eq%20'ros-noetic-desktop_full')%20and%20IsLatestVersion&semVerLevel=2.0.0' with following message : 响应状态代码不指示成功: 404 (Not Found)。 ros-noetic-desktop_full not installed. The package was not found with the source(s) listed. Source(s): 'https://aka.ms/ros/public;https://community.chocolatey.org/api/v2/' ...
估计是microsoft不再维护ros-noetic-desktop_full,已从“https://aka.ms/ros/public"的可下载列表中删除了。
二、让Ros工作在一node一进程
为使用rivz,须让Rose-Ros工作Ros原有一node一进程。
<libros>/ros_comm/roscpp/src/libros/common.cpp
------
namespace ros {
#ifdef _WIN32
// nocopy_intra置为false。
bool nocopy_intra = false;
#else
bool nocopy_intra = true;
#endif
}把表示进程内不复制的变量nocopy_intra置为false,然后编译。
二、新开ROS cmd:roscore
三、新开ROS cmd:rosrun rviz rviz
四、操作rviz(导航)
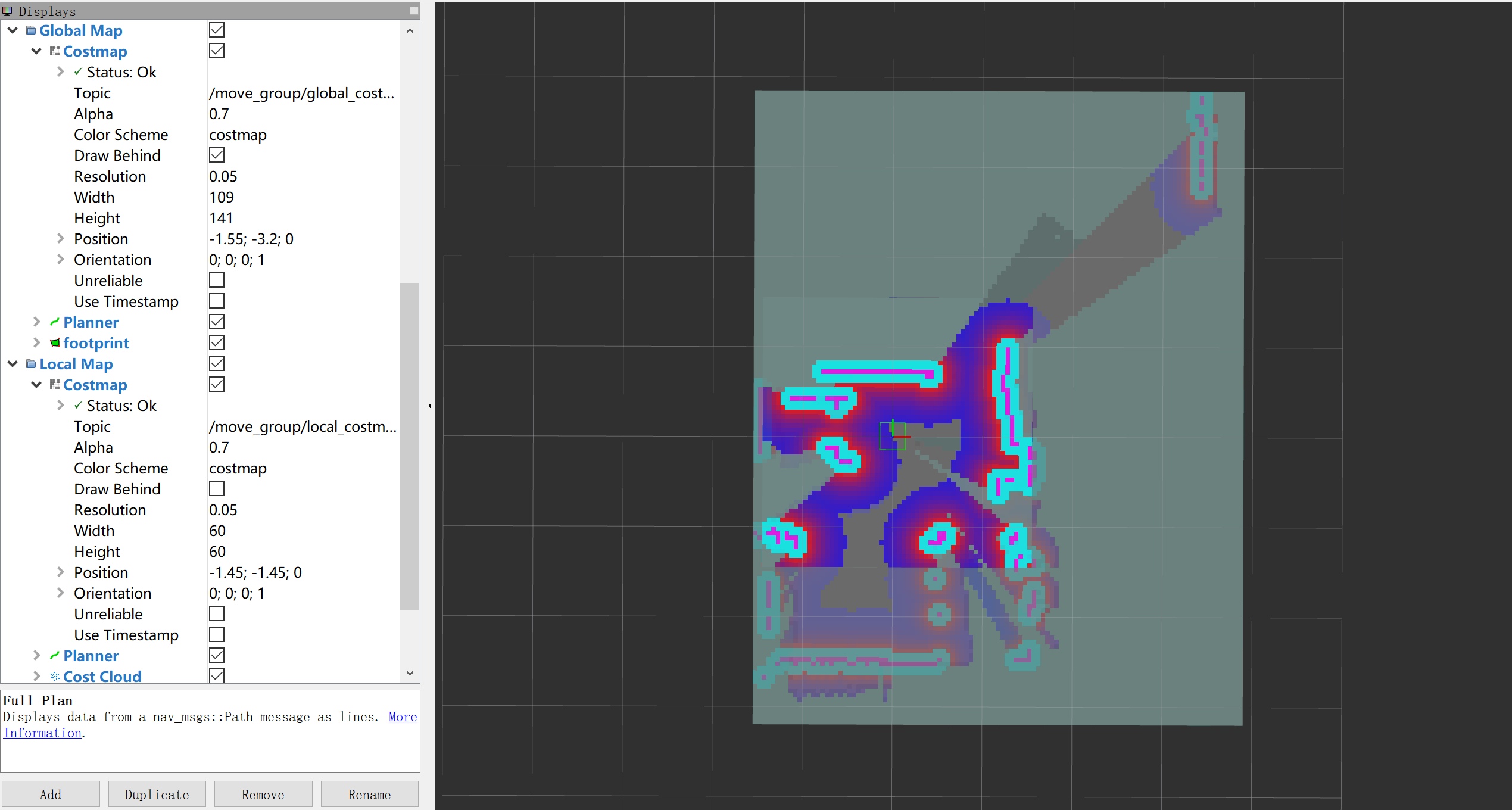
File -- Recent Configs -- navigation_rose.rviz
- {Global Options}Fixed Frame: map。map是世界坐标系。
- {Global Map:Costmap}1)Color Scheme选择“costmap”。2)打勾“Draw Behind”。查看时,rviz极可能同时订阅着全局代价地图、局部代价地图costmap,这时局部代价地图会覆盖在是全局代价地之上。为方便开发者分清哪是全局地图、哪是局部地图,这时建议把全局地图的rviz选项“Draw Behind”打勾,这样全局地图颜色变暗。
- {Global Map:Costmap}Color Scheme选择“costmap”。
| Add | C++类型 | Topic | 描述 |
| (rviz)TF | tf树,一个就够了 | ||
| (rviz)Polygon | geometry_msgs/PolygonStamped | /move_group/global_costmap/footprint(注1) | 全局代价地图中的footprint |
| (rviz)Polygon | geometry_msgs/PolygonStamped | /move_group/local_costmap/footprint | 局部代价地图中的footprint |
| (rviz)Map | nav_msgs::OccupancyGrid | /move_group/global_costmap/costmap | 全局代价地图uint8_t数组(注2) |
| (rviz)Map | nav_msgs::OccupancyGrid | /move_group/local_costmap/costmap | 局部代价地图uint8_t数组(注2) |
| (rviz)PointCloud2 | sensor_msgs::PointCloud2 | /move_group/DWAPlannerROS/trajectory_cloud | 显示候选轨迹 |
| (rviz)Path | nav_msgs::Path | /move_group/GlobalPlanner/plan | 在全局代价地图,makePlan规划出的路径MoveBase.planner_plan_(注3)。绿色 |
| (rviz)Path | nav_msgs::Path | /move_group/DWAPlannerROS/global_plan | 全局路径,基本和MoveBase.planner_plan_重合。红色 |
| (rviz)Path | nav_msgs::Path | /move_group/DWAPlannerROS/local_plan | 局部路径,即最优轨迹中路径。蓝色 |
注
- 在“Topic”,话题放在“move_group”这个名字空间,是为和move_group相关那些topic兼容。
- 还有个和costmap话题相似的/move_group/global_costmap/costmap_updates。always_send_full_costmap_==false时,如果代价地图尺寸、原点没变过,只是内容变了,那只会发布constmap_updates,不会有costmap。always_send_full_costmap_==true时则只会发costmap。
- GlobalPlanner/plan是makePlan出的来全局路径。DWAPlannerROS/global_plan是从全局路径MoveBase.planner_plan_截取出的位在局部代价地图内的路径。对官方ros来说,这路径和GlobalPlanner/plan重合。DWAPlannerROS/local_plan是候选轨迹选出的、最优轨迹中路径。
| grid_.data[n] | 颜色值 | rviz显示的颜色(Color Scheme选择“costmap”) |
| 255(NO_INFORMATION) | -1 | 白色(半透明)rviz上看到的显示的是半透明底下图像,通常就是地图。它那里像被镂空 |
| 254(LETHAL_OBSTACLE) | 100 | 红色 |
| 253(INSCRIBED_INFLATED_OBSTACLE) | 99 | 青色 |
| 0(FREE_SPACE) | 0 | 没有颜色。rviz上看到的显示的是底下图像,通常就是地图。它那里像被镂空 |
| [1, 252],值记为i | 1 + (97 * (i - 1)) / 251 | 值从98到1时,从红变成蓝 |
4.1 Costmap2DPublisher
Costmap2DPublisher负责发布costmap、costmap_updates话题。
Costmap2DPublisher(ros::NodeHandle * ros_node, Costmap2D* costmap, std::string global_frame, std::string topic_name, bool always_send_full_costmap = false);
always_send_full_costmap_==false时,如果代价地图尺寸、原点没变过,只是内容变了,那只会发布constmap_updates,不会有costmap。always_send_full_costmap_==true时则只会发costmap。因为只是在开发时才会看costmap,而且如果没有订阅者,即使到发布时间了,也不会发布话题,免得麻烦,我是总把always_send_full_costmap_设为true。
void updateBounds(unsigned int x0, unsigned int xn, unsigned int y0, unsigned int yn)
{
x0_ = std::min(x0, x0_);
xn_ = std::max(xn, xn_);
y0_ = std::min(y0, y0_);
yn_ = std::max(yn, yn_);
}xn、yn尺度是size值。x0_、xn_、y0_、yn_都是基于map坐标系的值。
{x0, xn, y0, yn}表示当前代价地图边界,为什么不是直接替代,而是要包含原来存在、而此刻不存在的部分呢?
void Costmap2DPublisher::publishCostmap()
{
if (costmap_pub_.getNumSubscribers() == 0)
{
// No subscribers, so why do any work?
// 如果没有订阅者,即使到发布时间了,也不会发布话题。
return;
}
boost::unique_lock<Costmap2D::mutex_t> lock(*(costmap_->getMutex()));
float resolution = costmap_->getResolution();
if (always_send_full_costmap_ || grid_.info.resolution != resolution ||
grid_.info.width != costmap_->getSizeInCellsX() ||
grid_.info.height != costmap_->getSizeInCellsY() ||
saved_origin_x_ != costmap_->getOriginX() ||
saved_origin_y_ != costmap_->getOriginY())
{
// prepareGrid功能填充grid_。
prepareGrid();
costmap_pub_.publish(grid_);
} else if (x0_ < xn_) {
...
costmap_update_pub_.publish(update);
}
xn_ = yn_ = 0;
x0_ = costmap_->getSizeInCellsX();
y0_ = costmap_->getSizeInCellsY();
}如果没有订阅者,即使到发布时间了,也不会发布话题。