
足迹表示机器人的轮廓,只能是一个多边形,或一个圆形。不论哪种形态,都用std::vector<geometry_msgs::Point>进行存储,对每个Point,z分量都是0。文中把这些Point称为顶点。对多边形,顶点数目是多边形中点的数目,圆形则固定用16个顶点。
一、配置和变量
配置涉及到两处变量,这些变量单位都是米。
param参数
多边形时 footprint = "[[-0.1, -0.06], [0.08, -0.06], [0.1, 0.0], [0.08, 0.06], [-0.1, 0.06]]";
“[[], ... []]”不是xml-prc内置格式,<costmap_2d>/src/array_parser.cpp中的parseVVF负责把这字符串解析成std::vector<std::vector<float> >。后者再转成std::vector<geometry_msgs::Point>。
至少需要3个顶点。
圆形时 robot_radius = 1.234;
轮廓半径,当中取16个点。
动态配置参数
footprint_padding = 0.01
在param参数的基础上,整个轮廓向外延伸footprint_padding米,延伸后轮廓将做为最终的footprint。
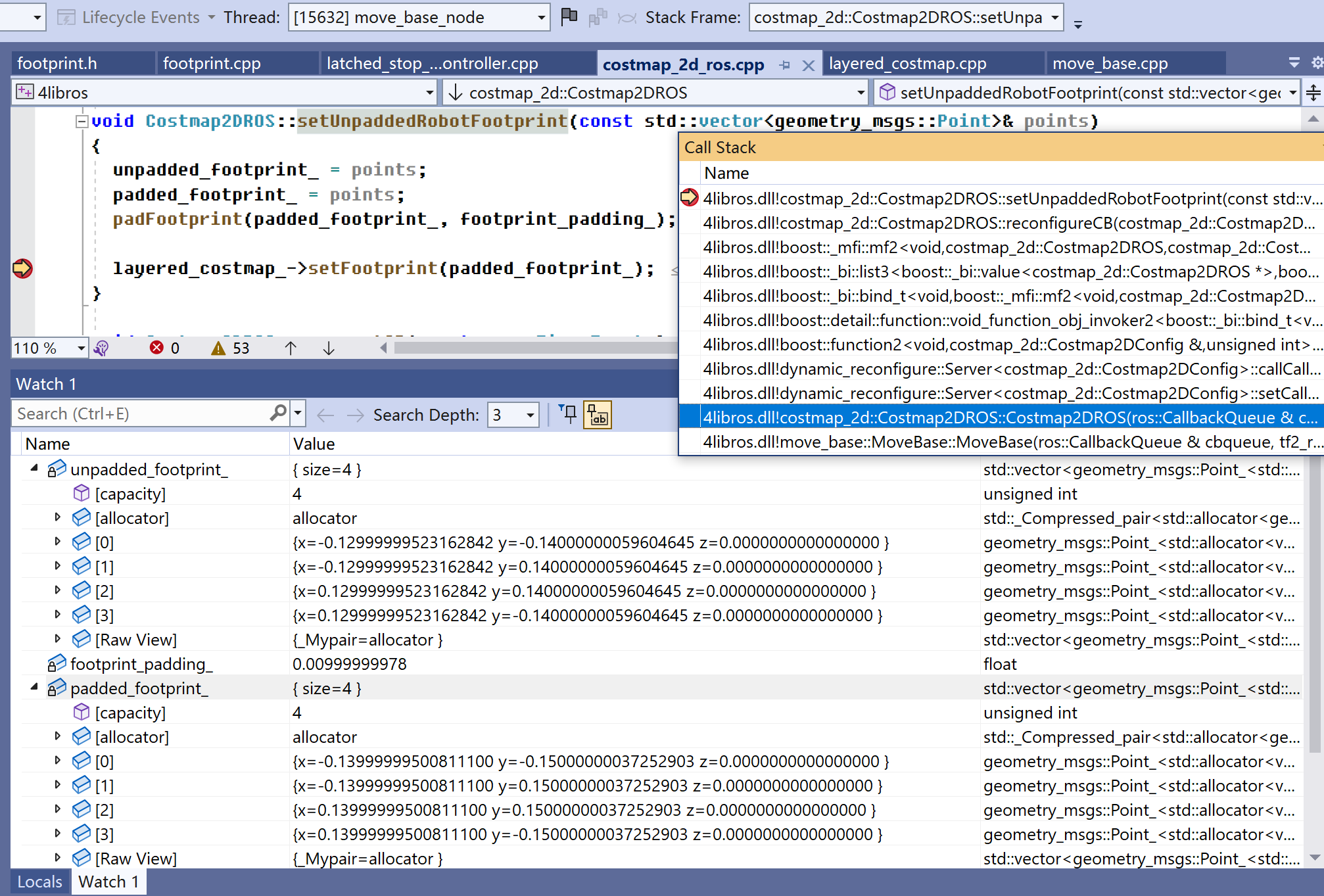
图1中的setUnpaddedRobotFootprint显示了如何从参数生成footprint,调用时机是在构造Costmap2DROS时。
- std::vector<geometry_msgs::Point> unpadded_footprint_。未填充过的足迹,即直接从param参数“footprint”或“robot_radius”算出的足迹。由于它不可直接用于计算导航,很少会用它。
- float footprint_padding_。来自动态配置参数footprint_padding。图1中值是0.01,即1厘米。
- std::vector<geometry_msgs::Point> padded_footprint_。填充过的足迹。unpadded_footprint_加上footprint_padding_后的足迹。它就是导航过程中机器人的footprint,读取它的api是getRobotFootprint()。
以上三个都是Costmap2DROS成员变量,另外LayeredCostmap.footprint_,ObstacleCostFunction.footprint_spec_,都等于填充过的足迹Costmap2DROS.padded_footprint_。
二、计算内切圆、外切圆
- footprint中心是base_footprint坐标系原点。
- 两个圆的圆点一定是footprint中心。
- 在计算时,会算出两种距离:原点到顶点的距离vertex_dist,原点到线段的距离edge_dist。
- 内切圆半径:所有距离的最小值。
- 外切圆半径:所有距离的最大值。
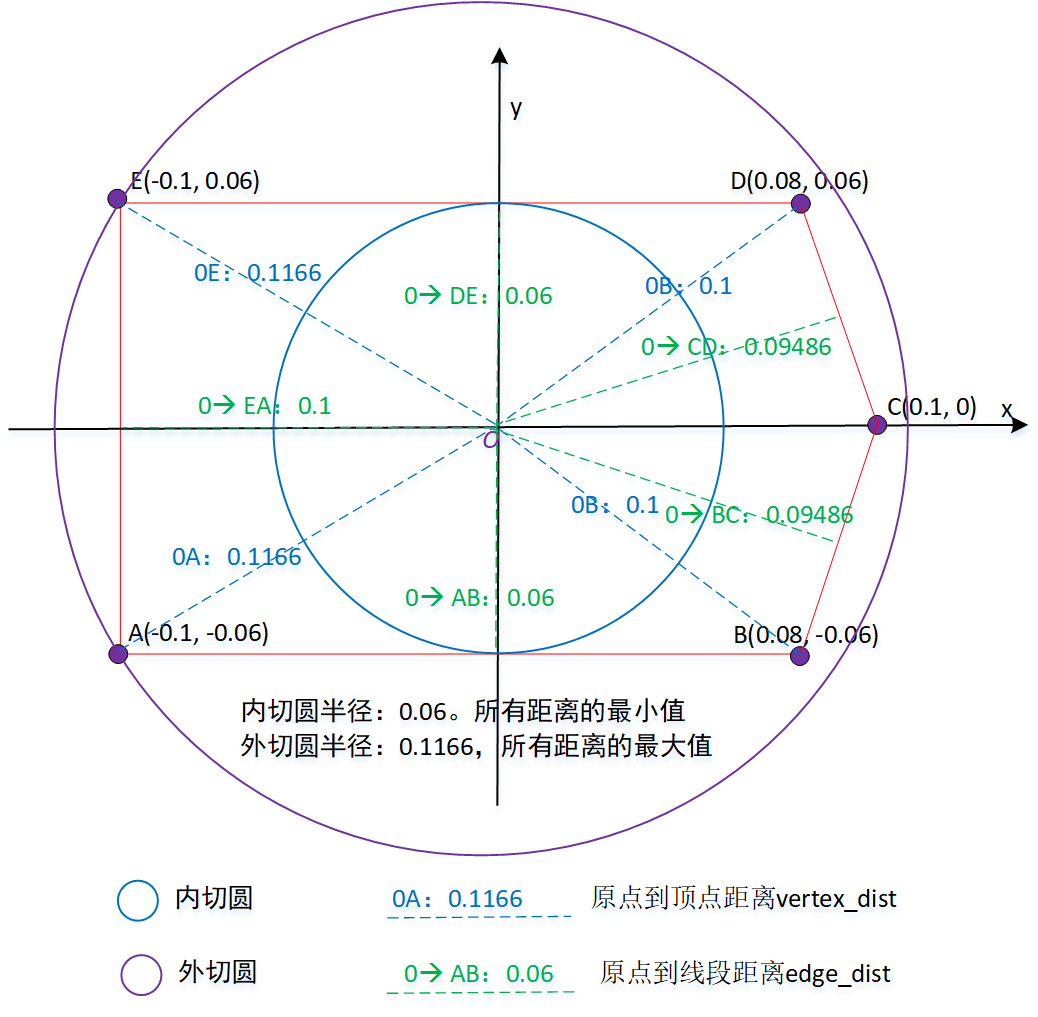
calculateMinAndMaxDistances用于计算这两个半径。输入参数footprint是填充过的足迹padded_footprint_,即图中红色五边形。输出参数min_dist存储着内切圆半径,max_dist则存储外切圆半径。
<libros>/costmap_2d/src/footprint.cpp
------
void calculateMinAndMaxDistances(const std::vector<geometry_msgs::Point>& footprint, double& min_dist, double& max_dist)
{
min_dist = std::numeric_limits<double>::max();
max_dist = 0.0;
if (footprint.size() <= 2)
{
return;
}
for (unsigned int i = 0; i < footprint.size() - 1; ++i)
{
// check the distance from the robot center point to the first vertex
double vertex_dist = distance(0.0, 0.0, footprint[i].x, footprint[i].y);
double edge_dist = distanceToLine(0.0, 0.0, footprint[i].x, footprint[i].y,
footprint[i + 1].x, footprint[i + 1].y);
min_dist = std::min(min_dist, std::min(vertex_dist, edge_dist));
max_dist = std::max(max_dist, std::max(vertex_dist, edge_dist));
}
// we also need to do the last vertex and the first vertex
double vertex_dist = distance(0.0, 0.0, footprint.back().x, footprint.back().y);
double edge_dist = distanceToLine(0.0, 0.0, footprint.back().x, footprint.back().y,
footprint.front().x, footprint.front().y);
min_dist = std::min(min_dist, std::min(vertex_dist, edge_dist));
max_dist = std::max(max_dist, std::max(vertex_dist, edge_dist));
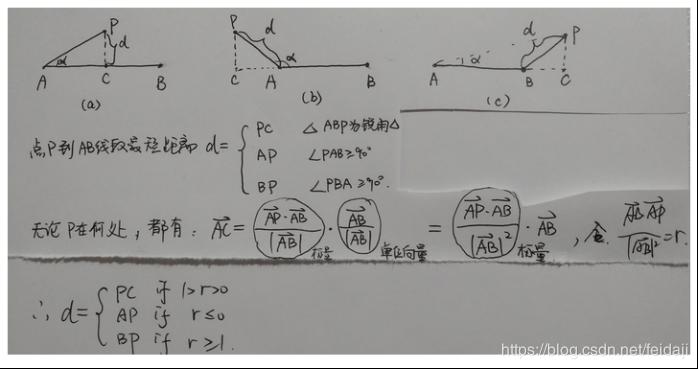
}distanceToLine用于计算原点(0, 0)到线段距离,代码注释见“costmap_2d中计算footprint的内切圆半径和外切圆半径的函数解析——点到线段的距离计算[1] ”。
三、代价地图中足迹
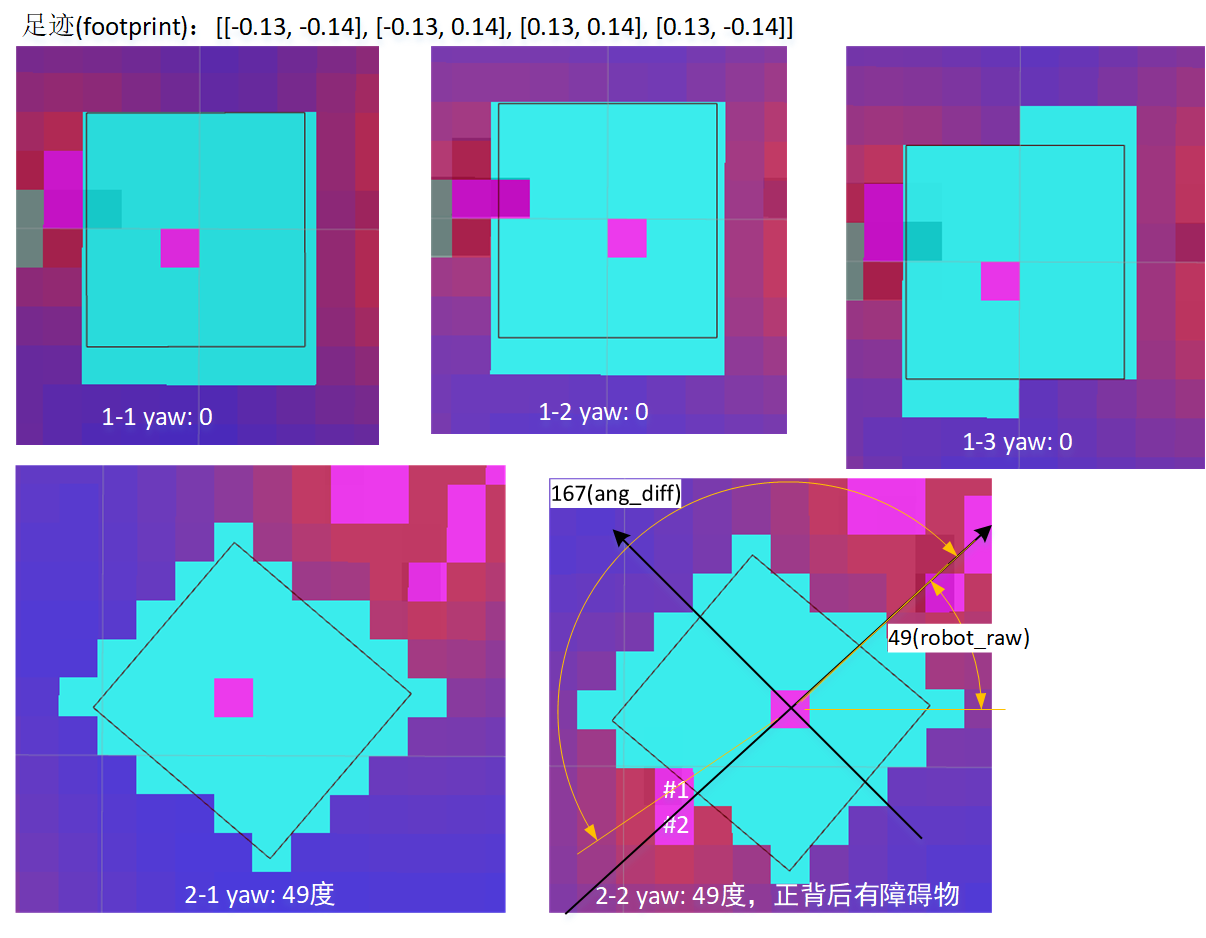
- 黑色框是rivz收到footprint话题后画出的足迹。中间红色是机器人中心(base_footprint坐标系原点)所在栅格。
- 第一行;航偏角(yaw)0度,背后放一个宽度9cm的障碍物。机器人、障碍物都不动时,然后不同时刻从rviz截出来的三张图。
- 第二行;航偏角(yaw)49度。机器人不动时,不同时刻从rviz截出来的两张图。
- 青色是Costmap2D::setConvexPolygonCost会涉及到的栅格(包括1-2、2-2障碍物突进的那个栅格。
- 1-1、1-2、1-3左侧和2-2左下红色是9cm宽障碍物。
rviz画足迹框不是以栅格为单位,是按world坐标系的米。
机器人中心栅格在足迹框中的位置不是固定的。以图中yaw=0为例,在x方向,1-1和1-2不一样。类似的,y方向也会不一样。
即使足迹是矩形,代价地图出来的足迹可能不是矩形。示例见1-3。
有障碍物毗邻机器人时,虽然现实看到它们没有相互交织,但在代价地图会出现,即共同栅格。要理解这个,栅格对应现实世界5cmx5cm面积,如果机器人和障碍物都有出现在这面积,它们自然要共用。于是可得出个结论:Costmap2D::setConvexPolygonCost(..., FREE_SPACE)会清除毗邻障碍物。
代价地图中栅格数并不严格等于按footprint数值算出的栅格数。以图中yaw=0为例,按footprint数值算的话,水平、垂直都6个栅格,但3张图的重直方向都是7个栅格。
由于激光雷达存在随机误差,导致9cm障碍物并不会总是占用两栅格。
四、transformFootprint
<libros>/costmap_2d/src/footprint.cpp
------
namespace costmap_2d
{
void transformFootprint(double x, double y, double theta, const std::vector<geometry_msgs::Point>& footprint_spec,
geometry_msgs::PolygonStamped& oriented_footprint)
{
// build the oriented footprint at a given location
oriented_footprint.polygon.points.clear();
double cos_th = cos(theta);
double sin_th = sin(theta);
for (unsigned int i = 0; i < footprint_spec.size(); ++i)
{
geometry_msgs::Point32 new_pt;
new_pt.x = x + (footprint_spec[i].x * cos_th - footprint_spec[i].y * sin_th);
new_pt.y = y + (footprint_spec[i].x * sin_th + footprint_spec[i].y * cos_th);
oriented_footprint.polygon.points.push_back(new_pt);
}
}
}oriented_footprint存储着把机器人中心放在(x, y),并且旋转theta角度后,size()个顶点在x、y所属的坐标系下的坐标。costmap_2d::transformFootprint(...)有着一样代码。
参考
- costmap_2d中计算footprint的内切圆半径和外切圆半径的函数解析——点到线段的距离计算 https://www.freesion.com/article/8527194106