
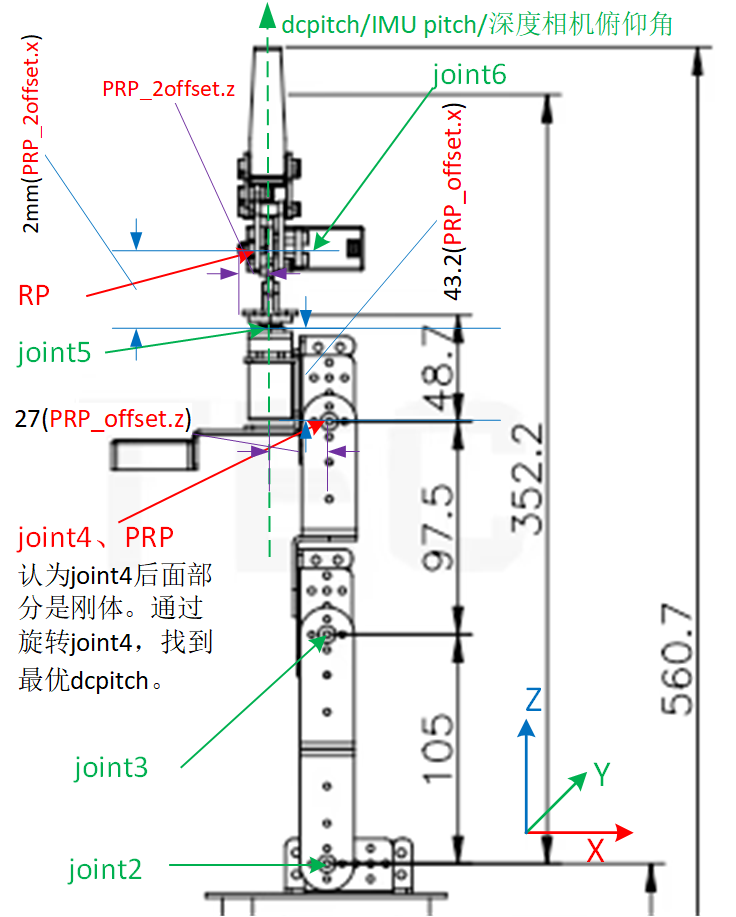
- RP(Reference Point):参考点。存在爪子上的一个点,由机械臂提供商在图像中识别出来。y分量必须在机械臂中线上。
- PRP(Pitch Reference Point):俯仰角参考点。位置上,x、z是PRP_joint关节原点,y等于参考点的y。为让爪子放在正确位置,一种方法是调爪子的俯仰角,调角度时就是通过这个关节。它的计算方法,RP坐标减去一个固定偏移得到,这个偏移等到RPR_offset + RPR_2offset。
- TP(Target Point):目标点。在输入的彩色图像,识别小程序给出这个点。它指示机械臂要操作的目标物坐标。
- PRP_offset:有两个作用。1)计算PRP相机坐标。2)导找最优dcpitch。——moveit.rsp存储的dist是(RP-PRP_2offset.x)到末端的距离。
- PRP_2offset:只用于计算PRP坐标,这个坐标是在RPR_offset基础再加上,因而出现“2”字样。它不用于寻找最优dcpitch。
一、一次识别过程
夹取3cmx3cmx3cm方块实例。已启动深度相机、底盘(用于控制机械臂)、IMU(用于获取俯仰角pitch),负责识别方块的小程序是aplt.leagor.basic。
- 识别线程。深度相机的DoWork线程,任务是根据输入的彩色图像,告知TP在彩色图像中的像素坐标。
- 任务线程。求逆解,控制机械臂等,是些耗时操作,为不干扰主线程,让执行在任务线程。
1 (主线程)调用start_operate(),进入state_distance状态。深度相机把实时彩色图像交给小程序。
2 (识别线程)识别彩色图像,告知检测到一个目标点TP:color_points。彩色图像是二维图像,color_points是在该二维图像中的像素坐标。
3 (主线程)调用handle_distance()。
- 在该彩色图像中找到参考点RP,得到参考点在彩色图像中像素坐标。
- 深度相机在彩色深度同步功能,于是由之前彩色图像中的像素坐标,可在深度图像中查到对应深度,并计出相应RP、TP的相机坐标系下的笛卡尔坐标:ref_camera_xyz、target_camera_xyz。
- 根据相机坐标系和世界坐标系位姿变换,得到RP、TP在世界坐标系下的笛卡尔坐标:ref_map_xyz、target_map_xyz。
- 由IMU得到当前dcpitch,计算出在俯仰角值是dcpitch时的坐标:RP_、TP_。
- 由moveit.rsp给出的爪子模型,调用RP_2_PRP,得到PRP_。
- 计算接下机械臂要移动多少距离delta,因为y方向不会有变换,delta.y总是0,要计算的是delta.x、delta.z。接下移动是近距移动,在计算x时,除precise_gap_x外,还须加上blind_x_threshold。因为近距移动后,会有一次图像识别过程,只有precise_gap_x的话,爪子离目标物太近,会导致无法识别。
- 由正向运行学方程得到当前fk,fk加上delta,就是接下求解的逆解query_fk。并进入state_ik状态。
4)(任务线程)在ik_arm组求逆解,得到组内关节状态joint_values。旋转各关节,让达到joint_values。
5)(主线程)发现已得到逆解,进入state_distance状态。深度相机再次把实时彩色图像交给小程序。转到步骤2。
6)(主线程)在步骤3中的3.6计算delta。接下要进行盲移,计算delta.x时只须考虑precise_gap_x,不再需要blind_x_threshold。同时会置near_move_finished=true,表示近距移动结束了。
7)(任务线程)和步骤4一样,求逆解,旋转各关节到joint_values。?但不再控制PRP关节必须角度?
8)(主线程)发现已得到逆解,进入state_claw状态。
9)(任务线程)由正向运动学方程得到当前fk,记为curr_fk,认为curr_fk减去near_moved_fk就是此次PRP移动了距离,得到“移动”后的PRP在世界坐标系坐标:PRP。根据PRP、爪子模型、TP,调用find_best_dcpitch,计算最佳dcpitch。find_best_dcpitch(...)得到的是深度相机俯仰角dcpitch,不是PRP_joint的旋转角度。
10)(任务线程)旋转PRP关节,让转出dcpitch。同时控制爪子,旋转出snapshot.value。
二、搜寻、对齐、可逆解
2.1 搜寻
搜寻指的是机器人导航到预设位置后,寻找目标物。搜寻可分为两步。
- 在当前点找寻目标物。如果没有,机器人逆时针转45度,将这个点做为当前点。如果还是没有,继续转45度。直到转了一圈,如果都没有,此将操作失败。
- 在当前点,再分两次。初始状态,搜5秒。如果没发现目标,相机向前伸出至少10厘米,称近距识别状态,再搜5秒。在当前点时,目标物或许离机器人较远,相机要近距识别状态才能发现。
让相机向前伸10厘米,可有两种方法。一是机器人向前移。二是机械臂向前移。用第一种方法,机器人移动有较大随机性,而且还得退回来。这里选择使用移动机械臂。于是机械臂存在两个和识别相关状态,初始识别状态(state_recognize)和近距识别状态 (state_recognize_near)。
在搜寻过程,机器人会发生的移动是线速度为零的原地转。
2.2 对齐
对齐指的是要让目标点尽量在爪子中心线上。想象下夹取苹果,苹果中心点要在爪子中心线上。当然,实际很难做到在中心线,为此只能是尽量。对齐有两种方案,一是旋转机器人,二是旋转机械臂,具体是当中joint1关节。
方案之旋转机器人
旋转机器人时,虽然会发给一个线速度为0的速度,但转后,不能保证机器人旋转后还在原坐标。
转了几次,快到目标角度时,难免要用到小速度。根据经验,最终中心线和目标点夹角不让超过6度,要到达6度内误差,对底盘速度控制还是有点要求的。
这里暂不用横移,即只有y不是0的速度。考虑到一些机器人并没有很好做到横移,不想只是因为这里,而要求机器人有很好横移性能。
方案之旋转机械臂
相比旋转机器人,旋转机械臂能容易到达满足对齐。不过它有个缺陷,当距离不满足时,像不在可逆角薄围,要移动dist米。通过dist*cos(yaw)是可以把要移动的距离算出来,可这样,角度就不满足了。
在对齐过程,机器人会发生的移动是线速度为零的原地转。
2.3 混合搜寻、对齐、前后
前后指的径直向前或径直向后。而不论搜寻还是对齐,都是拐弯。实际情况下,搜索、对齐不是可以独立分开的两个阶段,而且还会和前后混合,即机器人一会儿前后,一会儿拐弯,不断夹杂。让看示例。
- 在初始识别状态,5秒内没发现目标物,进入近距识别状态。发现目标物,进入对齐。
- 完成对齐,进入求逆解。发现距离不在可逆解范围,需后退。
- 后退后,发现没了目标物,进入搜寻。即使有目标物,角度不满足,进入对齐。
一旦不在逆解范围,就会再次搜寻、对齐,于是会看到机器人移动不断出现后退、拐弯。
机器人发生前后移动后,机械臂会强制回到初始识别状态。原因是近距识别状态,可能发生丢失目标物,那还是得回到初始状态。于是会出现从近距状态回到初始状态,使得判断机器人是否发生过前后移动更复杂了。
1)如果是action_navigation_near才找到的,移动距离通过fk差。2)如果5秒内仍旧没有收到可识别帧,认为此个角度失败,换下个角度。
对前后移动,有时可能要求只是小距离,像1cm。机器人很难做不到只移动这么点距离。有人会想到这么个方法:先后退5cm,再前进6cm,从而前面1cm。没采用这,这有两上原因。1)每次后退、前进,并不能保证会有操作。2)即使有操作,误差有时较大,像超过3cm,在这时还不如直接跑个3cm。
2.4 判断机器人是否发生过前后移动
发送命令前后移动的速度,2.5秒后,需要判断机器人是否有移动,没有,要再次发送速度。原因是发送速度后,机器人可能不动。就没动过,后面ik肯定失败,还是会回来继续发送速度,徒增时间。
计算出TP和PRP之间x距离(TP_PRP_diff_x),如果前后两次距离差值超过1cm,认为移动过,否则没有。这里有个问题,机器人发现需要移动时,机械臂在哪个状态是未知的,可能初始状态,可能近距状态,可能其它位置。而在判断是否有移动,是要恢复到初始状态。即计算TP_PRP_diff_x是在任意状态,而判断是在初始状态,如何在任意状态计算出初始状态时偏移(initial_fk_TP_RP_diff_x)?——要能发现目标物,至少有一次或是在初始状态、或是在近距状态,记住当时TP_PRP_diff_x作为initial_fk_TP_RP_diff_x。当然,如果在近距状态,须要加上初始、近距两状态下的PRP偏移。以下是一次在近距状态时,IK失败时流程。
- (state_distance)在handle_distance,计算初始状态时initial_fk_TP_RP_diff_x。但正处在近距状态,要在当前TP_RPP_diff_x上,加两个状态的PRP偏移。
- (state_ik)在近距状态,IK失败。initial_fk_TP_RP_diff_x赋值给operate_.TP_PRP_diff_x。机械臂恢复到初始状态。发布后退速度。
- (state_distance)2.5秒后。计算此时TP_PRP_diff_x,判断和operate_.TP_PRP_diff_x差是否超过1cm。
如何计算两个状态时的PRP偏移。目前用的是正向求解(fk)两状态时fk_xyz,然后得到x分量差值fk_diff_x,这个就做为PRP偏移。也就是说,urdf写着多少,那就是多少。如果想验证这值有多少误差,可进入lancher的“深度相机”,“Start”——“近距识别校准”。走完流程后,会弹出图2结果。
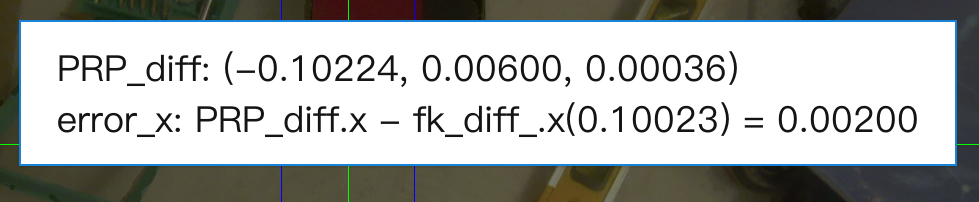
核验靠的是用深度相机得到的坐标计算PRP偏移。具体来说,核验时保证机器人和TP不变,只动机械臂,进行两次计算PRP和TP之间的x,方法“TP.x - PRP.x”。第一次在初始状态,第二次在近距状态,然后得到这两次x的差,即图2中PRP_diff。如果精准的话,这个PRP_diff.x和fk_diff_x的误差error_x应该很小。
对判断是否发生过前后移动,没用机器人在地图中的坐标变化。这种方法必须开着雷达、cartographer。
三、横抓
代码中grasp_horizontal表示用横抓。因为相机支架,导致横抓对距离要求较严格,目前不使用。

上图情况,要抓取顶上黄色积木。采用横抓,即最后dcpitch是0,那意味着要求joint4逆时针转。但是,因为相机支架被机械臂档了,实际已不可能再改变dcpitch。
四、在识别时,如果要依赖识别侧身图像,须仔细测试
根源出在识别时,不建议使用小点的相机俯仰角(dcpitch)。
图7中,要以贴在黄色木块侧身的二维码为识别特征,那意味着dcpitch不能太大,这会导致相机更倾向“平行”地面。也就意味着图7中得采用dcpitch=30这方案。

图7中的上、下两张图,机器人和目标物距离这些都没变过,只是上面那张相机俯仰角是70度,下面是30度。可以看到,在低dcpitch,近处物体会更多地拍不到,即使拍到,也更有可能被爪子档住,即使那物体离机器人中心(base_footprint原点)已有35cm。
因为侧身识别难问题,在按侧身按钮时,如果侧身图像过小,那建议改识别顶上图像,然后用一个距顶上图像的偏移来定位按钮。