
- 目前只支持N10(lidar_name=N10)。其它型号代码有保留,但没实物测过。为安全,一开始有验证lidar_name参数必须填“N10”。
- 按rose_ros对雷达驱动要求,一定发布sensor_msgs::LaserScan类型话题(pubScan=true),话题名“/laser_scan”(scan_topic),消息中frame_id填“laser”(frame_id)。
- 一定不发布sensor_msgs::PointCloud2类型话题(pubPointCloud2=false)。cartographer_node节点会发布这话题,而且已带上机器人位姿。雷达驱动填充这个消息还消耗时间。
- 取消专门用于发布“laser_scan”话题的线程pubscan_thread_。在node线程解析出一帧点云后,就调用发布函数pubScanThread。我不认为发布话题要用个专门线程。
- 有控制电机操作。运行雷达驱动时,会启动电机;结束雷达驱动时,会停转电机。
驱动源码在小程序Basic项目:<libleagor_basic>/lsx10。以下是一段点云(sensor_msgs::LaserScan)日志。可看到一秒大概10帧点云,即扫描频率10HZ。
SDL_Log("%u HandleLaserScanMessage, ranges.size: %i range(%.2f, %.2f) scan_time: %.3f angle(%.3f, %.3f, %.3f)",
SDL_GetTicks(), (int)msg->ranges.size(), msg->range_min, msg->range_max, msg->scan_time,
RAD2DEG(msg->angle_min), RAD2DEG(msg->angle_increment), RAD2DEG(msg->angle_max));
---
37454 HandleLaserScanMessage, ranges.size: 450 range(0.10, 12.00) scan_time: 0.099 angle(-180.000, 0.801, 180.000)
37554 HandleLaserScanMessage, ranges.size: 449 range(0.10, 12.00) scan_time: 0.099 angle(-180.000, 0.803, 180.000)
37652 HandleLaserScanMessage, ranges.size: 450 range(0.10, 12.00) scan_time: 0.098 angle(-180.000, 0.801, 180.000)
37752 HandleLaserScanMessage, ranges.size: 450 range(0.10, 12.00) scan_time: 0.099 angle(-180.000, 0.801, 180.000)
37851 HandleLaserScanMessage, ranges.size: 450 range(0.10, 12.00) scan_time: 0.099 angle(-180.000, 0.801, 180.000)
37955 HandleLaserScanMessage, ranges.size: 450 range(0.10, 12.00) scan_time: 0.103 angle(-180.000, 0.801, 180.000)
38054 HandleLaserScanMessage, ranges.size: 451 range(0.10, 12.00) scan_time: 0.099 angle(-180.000, 0.800, 180.000)
38154 HandleLaserScanMessage, ranges.size: 449 range(0.10, 12.00) scan_time: 0.099 angle(-180.000, 0.803, 180.000)
38254 HandleLaserScanMessage, ranges.size: 450 range(0.10, 12.00) scan_time: 0.099 angle(-180.000, 0.801, 180.000)
38354 HandleLaserScanMessage, ranges.size: 451 range(0.10, 12.00) scan_time: 0.099 angle(-180.000, 0.800, 180.000)
---range(0.10, 12.00)指的是sensor_msgs::LaserScan中的range_min、range_max字段。它们是“主观”指定,这里设为(0.10, 12.00)是和思岚A1M8一样。
一、控制电机

运行雷达驱动时,会启动电机,只会启动一次。结束雷达驱动时,会停转电机。
void LslidarDriver::ctrl_motor(bool start)
{
VALIDATE(valid(), null_str);
if (lidar_name == "N10") {
const int len = 43 * 4 + 16;
uint8_t data[len] = {0xa5, 0x5a, 0x55, 0x0};
data[len - 1] = 0xfb;
data[len - 2] = 0xfa;
data[len - 3] = start? 0x01: 0x00;
data[len - 4] = 0x01;
send_data(data, len);
}
}
void LslidarDriver::did_read_one_packet(const uint8_t* packet_bytes, int len)
{
......
if (!is_start) {
ctrl_motor(true);
is_start = true;
}
...
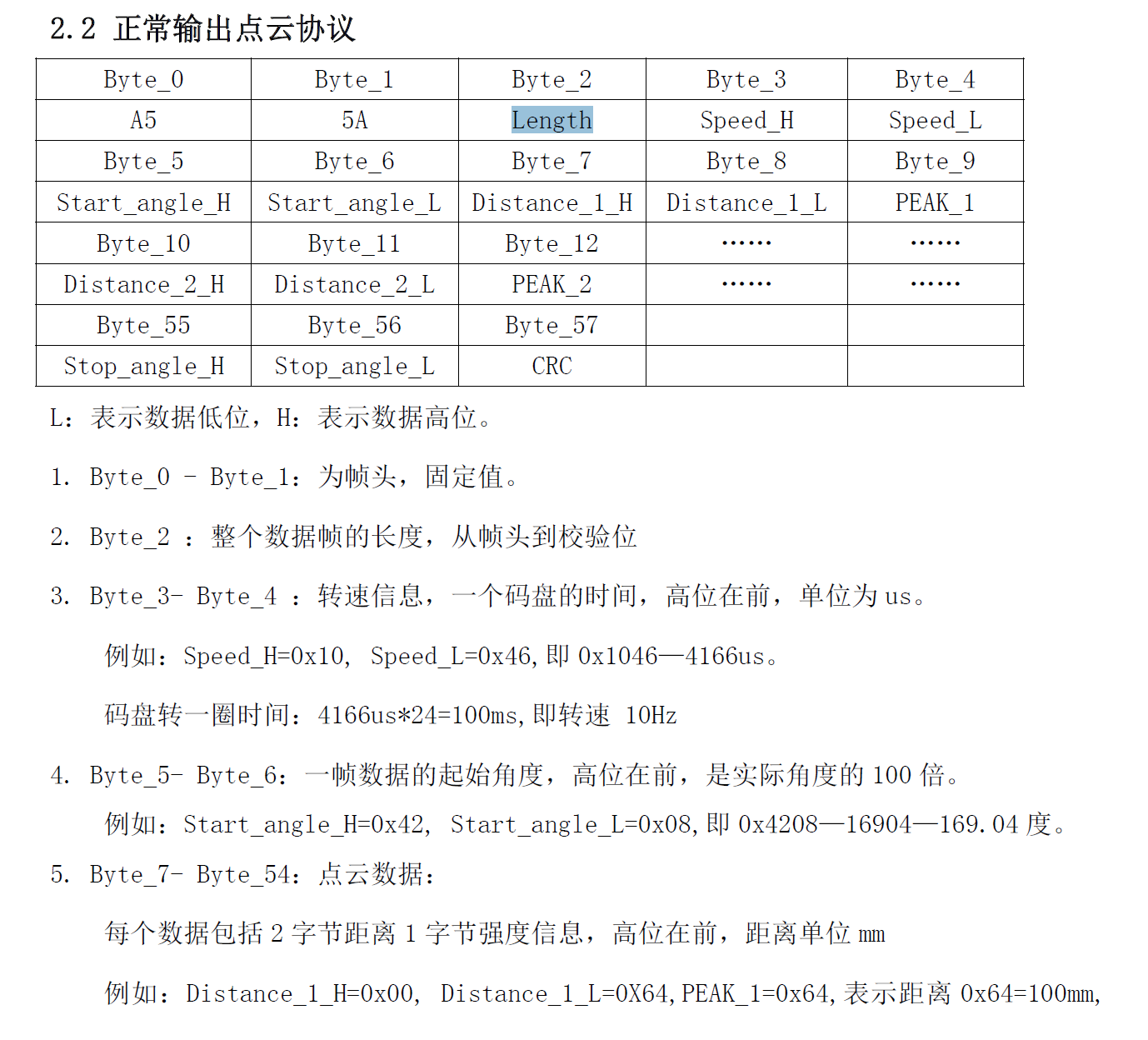
}启动电机发生在驱动读取到第一帧雷达点云数据时。发现is_start是false,就启动电机。电机只启动一次。这里有个问题,此次启动电机会不会出现失败?——曾在pdf找某个能反映电机转速的反馈,设想由反馈知道还没转,那就再发。只找到个或许有联系的“转速信息”,见图2“Speed_H、Speed_L”。手头这个雷达测试下来,电机转动时,Speed是100ms左右,这个pdf写的10HZ差不多。电机不转时,Speed是150ms左右。我不理解这个数值意义,也就没用。
二、sensor_msgs::LaserScan中的ranges可能全是inf
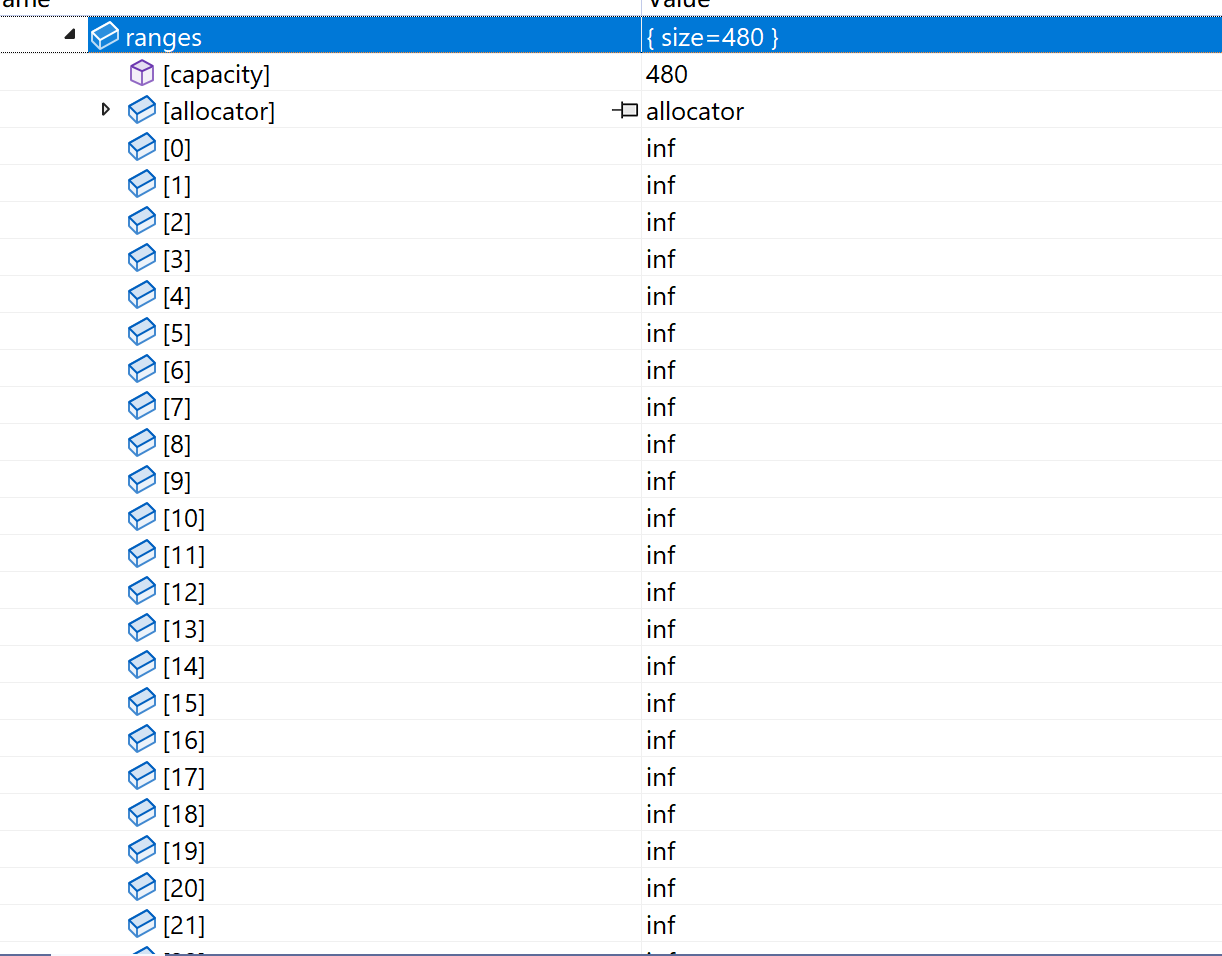
即使ranges全是inf,cartographer会正确处理掉这种情況。HandleLaserScanMessage处理点云时,调用ToPointCloudWithIntensities,把sensor_msgs::LaserScan格式的点云转成carto::sensor::PointCloudWithIntensities格式的points,接下调用void SensorBridge::HandleLaserScan。
void SensorBridge::HandleLaserScan(
const std::string& sensor_id, const carto::common::Time time,
const std::string& frame_id,
const carto::sensor::PointCloudWithIntensities& points) {
if (points.points.empty()) {points.points数就是msg.ranges的单元数。这里是0,退出。对此次点云处理就结束了。
return; } ... }
修改雷达驱动,可避免输出全inf。既然后面能安全处理,就暂不改了。
三、官方源码函数:LslidarDriver::receive_data
receive_data用于从雷达获取一帧点云数据。一旦成功,参数package_bytes存储着这帧点云数据,返回值表示字节数。如果失败,返回值是0,packet_bytes填什么不确定。过程中用了四次while读。
- 读出第一个字节0xa5。见图2的“Byte_0”。
- 到现在count是1。读出第二个字节0x5a。见图2的“Byte_1”。
- 到现在count是2。读出第三、第四个字节,见图2的“Byte_2、Byte_3”。对一些型号雷达,当中有表示该次点云字节数。像N10,Byte_2存储点云长度,值58。至此要算出一个表示此帧点云字节数的变量len,对N10,len等于58。
- 到现在count是4。此次读出该点云剩余字节数据len - count。对N10,要读54字节。不能多,也不能少。
/lslidar_driver/src/lslidar_driver.cc
------
int LslidarDriver::receive_data(unsigned char *packet_bytes)
{
int link_time = 0;
int len_H = 0;
int len_L = 0;
int len = 0;
int count_2 = 0;
int count = 0;
while (count <= 0)
{
count = serial_->read(packet_bytes, 1);
LslidarDriver::recvThread_crc(count, link_time);
}
if (packet_bytes[0] != 0xA5)
return 0;
第一次while读。读出第一个字节0xa5。
while (count_2 <= 0)
{
count_2 = serial_->read(packet_bytes + count, 1);
if (count_2 >= 0)
count += count_2;
LslidarDriver::recvThread_crc(count_2, link_time);
}
count_2 = 0;
if (packet_bytes[1] != 0x5A)
return 0;
第二次while读。到现在count是1。读出第二个字节0x5a。
while (count_2 <= 0)
{
count_2 = serial_->read(packet_bytes + count, 2);
if (count_2 >= 0)
count += count_2;
LslidarDriver::recvThread_crc(count_2, link_time);
}
count_2 = 0;
if (lidar_name == "M10")
len = 92;
else if (lidar_name == "M10_GPS")
len = 102;
else if (lidar_name == "N10_P")
len = 108;
else if (lidar_name == "N10" || lidar_name == "L10")
len = packet_bytes[2];
else
{
len_H = packet_bytes[2];
len_L = packet_bytes[3];
len = len_H * 256 + len_L;
}
if (lidar_name == "M10" || lidar_name == "M10_DOUBLE" || lidar_name == "M10_GPS" || lidar_name == "M10_P"
|| lidar_name == "M10_PLUS")
{
if (packet_bytes[2] == 0x55 && packet_bytes[3] == 0x00)
len = 188;
}第三次while读。到现在count是2。读出第三、第四个字节,对一些型号雷达,当中有表示该次点云字节数,像N10。然后得到此帧点云长度len,N10是58,即图2中Byte_2的Legnth值是58。
while (count < len)
{
count_2 = serial_->read(packet_bytes + count, len - count);
if (count_2 >= 0)
count += count_2;
LslidarDriver::recvThread_crc(count_2, link_time);
}第四次while。到现在count是4,此次读出该点云剩余字节数据“len - count”。对N10,还要读54字节。不能多,也不能少。
if (lidar_name == "N10" || lidar_name == "L10" || lidar_name == "N10_P")
{
if (packet_bytes[PACKET_SIZE - 1] != N10_CalCRC8(packet_bytes, PACKET_SIZE - 1))
return 0;
}
return len;
}返回值len是此次点云帧字节数,N10时58。