
本文内容未实现,写了些代码后,认为若没有深度摄像头,到头也可能只是实验室产品。代码中有叫ros::use_follow的变量,和它相关代码,本意是希望实现“跟着前方的二维码走”,可才写几段就不继续了。正常运行时,必须把use_follow置为false。
预建地图,然后在这地图上设个目标点,这地图中的机器人就导航到目标点,这是常见的一种导航。相对地,存在没有预建地图,称它为跟随式导航。
- 跟着某人的脚步走。
- 跟着前方二维码走。
- 沿着路上一条白线走。
- 有环境传感器给出绝对位置,借由传感器指定的位置到达某个位置(坐标)。
前面三种情况较相像,可归结为以下步骤。
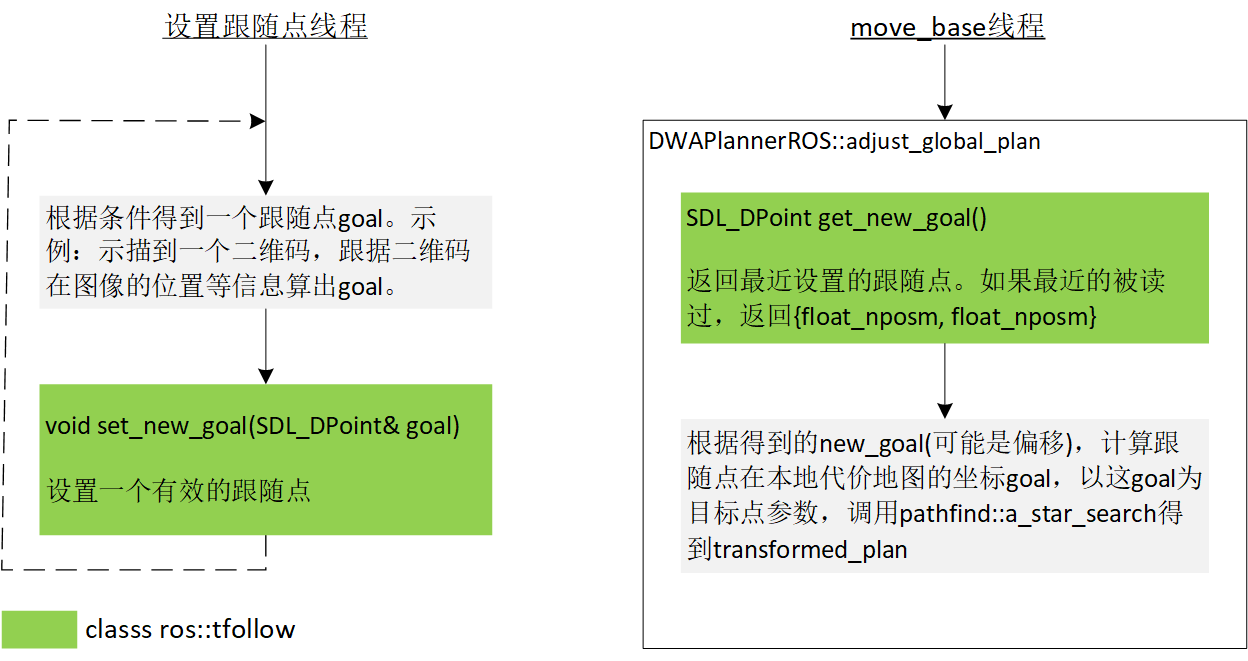
- 打开摄像头,由摄像头识别出物体在拍到的图像中位置position。
- 由位置position等参数计算出目标点距离机器人现在位置的偏移new_goal。
- 偏移new_goal结合机器人当前在本地代价地图(local_costmap)的坐标,计算出local_costmap要到达的目标点goal。
- 以这goal为目标点参数,调用pathfind::a_star_search得到本地路径transformed_plan。
针对第四种情况,若还是按上面这4步逻辑,它的new_goal或许可以直接就是goal。当然,这只是猜,真怎么实现要等到做了才知道。这里和前面3种放在一块,是表明我是想把这种场景也视为跟随式导航。