
本文给的雷达点云相关图像,用的雷达是镭神N10。
目前只支持机器人背部充电,不支持底部。对充电桩的硬件要求
- 对准误差不超过3cm。这意味着,每张接触铜片至少6cm。当然,这两铜片可能放在机器人端。
- 识别特征是直线。会用激光雷达识别充电桩,因而雷达扫描平面扫到的那一行得是直线。但雷达扫描平面不是严格在一个高度,上、下得留一定误差。建议至少各2cm(须雷达产家确认)。
- 宽度至少15cm。最终确定这个宽度时需要考虑机器人后背宽度,建议取15cm和“后背宽度+3cm”最大值。举个例子,机器人后背15cm,那充电桩宽度至少18cm。原因是一旦机器人对准充电桩时出现误差,像3cm。会出现机器人后背有3cm和充电桩是悬空的,这时机器人径直向后退时,由于3cm悬空,会给充电桩一个斜向力,这个力导致充电桩有向左或向右的移动趋势。
- 厚度至少5cm。可能的话留大点,像6cm。要给厚度留最小值,是为了区分充电桩和墙。要没意外,充电桩会靠着墙放。由于充电桩识别特征是直线,左、右两墙也是直线,虽然墙的宽度可能不在充电桩宽度范围,但也会遇到差不多情况。这时就要靠厚度区分哪是墙、哪是充电桩。
- 得能承受住机器人后退时产生的压力。快要对准时,机器人依旧会用几次后退来确保真的对准。这几次后退,机器人后背可能就紧贴着充电桩,充电桩得受得住这些压力。对这压力,一个指标是机器人后退的线速度会不大于0.05m/s。
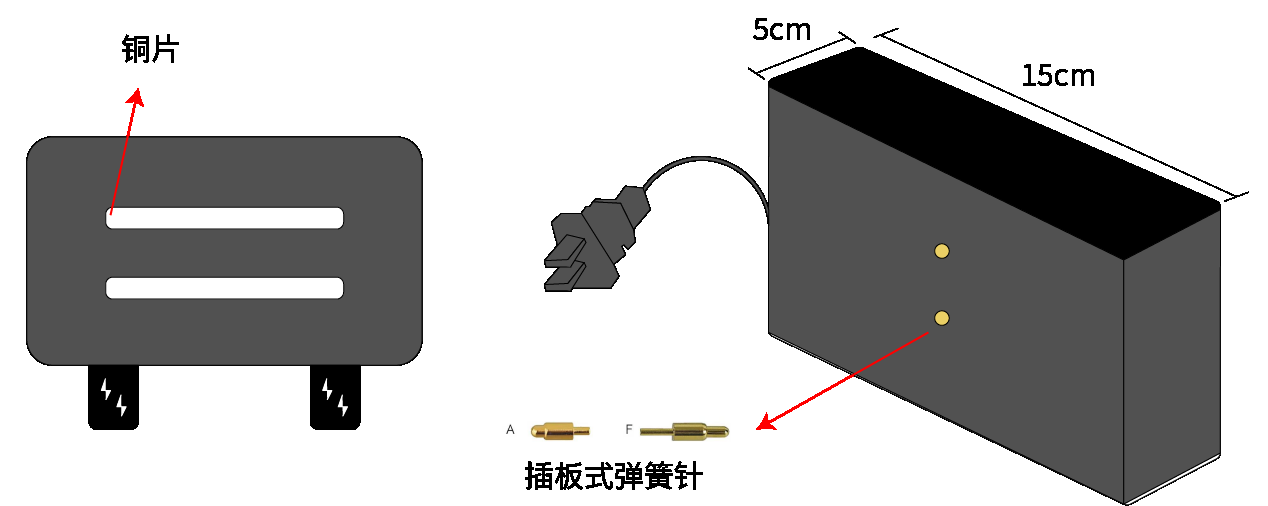
设想中的一种充电方案。在机器人尾部开两条槽,内粘两6cm铜片,作为充电口母头。在充电桩,对应两槽的中心,放两个pogopin弹簧触点,作为充电口公头。当机器人对准充电桩后,弹簧触点会碰到槽内铜片,实现充电。对两条槽位置,可能上下或左右。在都可以时,为容许更大误差,以及降低机器人最小宽度,建议用上下。
充电逻辑涉及到机器人硬件有没有提供是否正在充电标志。软件考虑了没有提供,这种情况下,会用每次间隔3秒的后退来判断。如果连续三次后退后,雷达到充电桩两端的距离基本没变,认为已在充电。对两条槽位置,可能开在上下或左右,为容许更大误差,以及降低机器人最小宽度,建议用上下。
由于会出现几次紧贴着充电桩的后退命令,可此时充电桩正挡着,其实机器人没有移动,这时在轮子电机处会“积蓄”着这段未移动距离,像弹簧一直被压着。一旦拿着机器人离开充电桩,压力被释放,轮子就自动转几圈。这个“积蓄”状态可能会烧坏电机,机器人须要提供个命令,让软件在要进入充电时,发这命令释放掉“积蓄”状态。
机器人放置雷达时,x方向可以不放在底盘中心。在y方向,雷达需放在底盘的y=0,即雷达和底盘的y偏移需是0。
一、总逻辑
建完地图后,地图上一定会有个叫“充电”的位置。用户在放置这位置时,须要离充电桩半米内,角度和充电桩垂直,且背对充电桩。
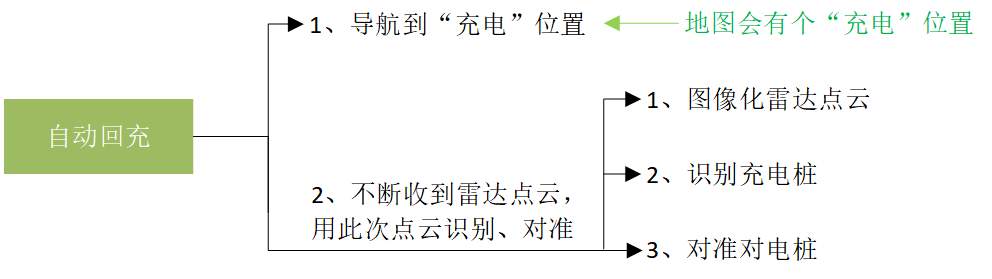
机器人判断出得去充电了,会先启动导航,自主导航到“充电”位置。导航结束,机器人离充电桩不到半米,且背对充电桩。然后不断重复收到雷达点云,用此次点云识别、对准充电桩,直到进入充电。
导航到了“充电”位置,如果3分钟后依旧没让进入充电,会结束此次任务。等着下一次判断出要充电了,重复上图的充电过程。
二、图像化雷达点云
1.1 由LaserScan点云转为cv::Mat
SDL_2Point tleagor_charge_api::did_scan_subscribed(const sensor_msgs::LaserScan& msg)
{
const std::vector<float>& ranges = msg.ranges;
float angle = msg.angle_min;
const double max_consider_range = 1.5;
const float range_max = SDL_min(msg.range_max, max_consider_range);雷达最远半径一般可12米,对识别充电桩来说,一般查1.2米内的点云就够了。为减少后绪计算量,要减少半径。这里设了1.5米。
for (int idx = 0; idx < scan_msg_range_size; ++ idx, angle += msg.angle_increment) {
const float echo = ranges[idx];
if (msg.range_min <= echo && echo <= range_max) {
float dx = cos(angle) * echo;
float dy = sin(angle) * echo;
tangle_range& angle_range = angle_ranges[ep_count ++];
angle_range.int250_x = (int)(dx * PIXEL_2_METER);
angle_range.int250_y = (int)(dy * PIXEL_2_METER);
posix_touch_i32(angle_range.int250_x, angle_range.int250_y, &min_x, &min_y, &max_x, &max_y);posix_touch_i32将找出点云中最小的x、y,以及最大的x、y。
}
}
SDL_Rect rect{0, 0, max_x - min_x + 1, max_y - min_y + 1};
const SDL_Point origin{0 - min_x, rect.h - (0 - min_y) - 1};posix_touch_i32计算出图像矩形rect。存储在msg.ranges的点,用的是数学坐标系,也就是说,在y轴,是越往下y值越小,这和图像坐标系相反。cv::Mat是图像坐标系,origin是雷达中心在图像中的坐标,因则它的y是“rect.h - (0 - min_y) - 1”。
cv::Mat laser_scan_mat = cv::Mat(rect.h, rect.w, CV_8UC1); ... }
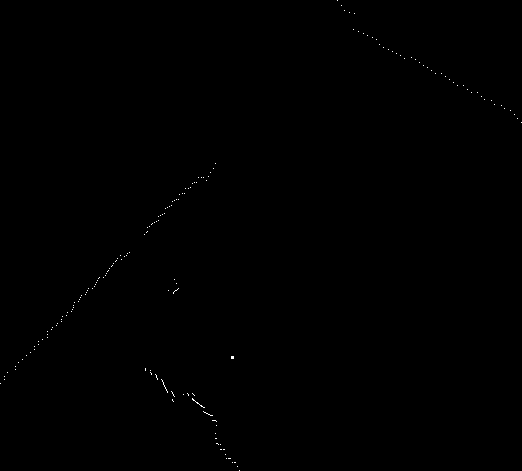
laser_scan_mat是由点云转换出的矩形,因为后面要用opencv,这里就把图像以着cv::Mat格式存储。origin是雷达中心在图像中的坐标。下图是一个由雷达点云转换出的cv::Mat。是个灰度图,点云中点所在像素值是255(白色),否则是0(黑色)。 左下较亮那个小方块是雷达中心(这9个像素是为调试特意设置到255),充电桩是左下三段中的中间那段。
PIXEL_2_METER用于把米表示的距离转换到用像素表示的像素数。当前PIXEL_2_METER值是250,即每像素4mm,这意味着图像精度是4mm。就识别效果来说,这精度一般是越大越好,不过有几个原因限制不能太大。
- PIXEL_2_METER变大,图像尺寸会数倍增加。后面cv::HoughLinesP消耗时间要变大。
- 图像精度太大,一旦超过了雷达距离精度,那同样1cm下,像由4像素变大到5像素,由于像素之间不连贯,可能会让cv::HoughLinesP连线时,不成功。
个人认为,上限不要让出现500,下限至少250。
二、识别充电桩
2.1 清除雷达点云中的孤悬点
对某个雷达点,如果半径3格内的48个点都不是雷达点,认为这个点是个孤悬点。充电桩靠墙放时,墙和充电桩点云离得较近,“连接线”上可能出现孤悬点。为避免让cv::cv::HoughLinesP在“连接线”生成直线,要清除这些点。
2.2 以半径1进行膨胀
膨胀目的是为让后面cv::HoughLinesP,容易在充电桩生成直线。
2.3 find_line
在叙述find_line函数前,先看下一个叫tline_C结构,它用于封装一条线。
2.3.1 tline_C
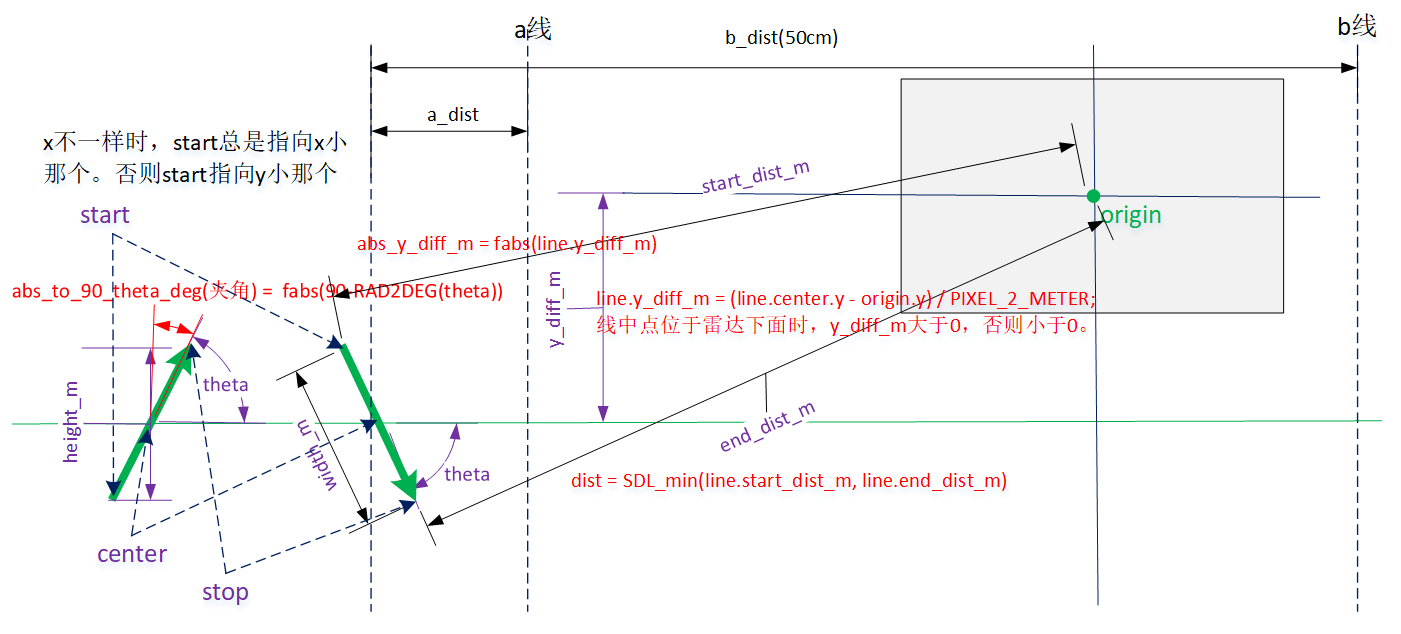
- start、end(SDL_Point)。线的两个端点。x不一样时,start总是指向x小那个。否则start指向y小那个。
- start_dist_m、end_dist_m(double)。雷达到两个端点的距离。
- center(SDL_DPoint)。线的中心点,为更精准,这里用了浮点。
- width_m(double)。线的长度,考虑到它要比较的是充电桩宽度,用了“width”字样。用户预先会给定一个充电桩真实宽度,一旦width_m不在充电桩宽度范围,那该线不可能是充电桩。
- theta(double)。单位弧度。线的角度,值总在[-90度, 90度]。绝对值在90附近,可能会出现正、负摇摆。像这次是86.9度,下次可能是-85.3度。
- height_m(double)。线在垂直方向高度。目前没使用。
- y_diff_m(double)。线中心到原点中心、在y方向的偏移。用的是“center.y - origin.y”,于是线中点位于雷达下面时,y_diff_m大于0,否则小于0。
对以double表示的距离,单位都是米,“_m”的语义就是米。图中红色还显示了如何得到三个变量,abs_to_90_theta_deg、abs_y_diff_m和dist,后面对准会用到这些变量。为叙述方便,abs_to_90_theta_deg称为夹角,从图中可看到,它是“90度减去theta“。
2.3.2 find_line逻辑
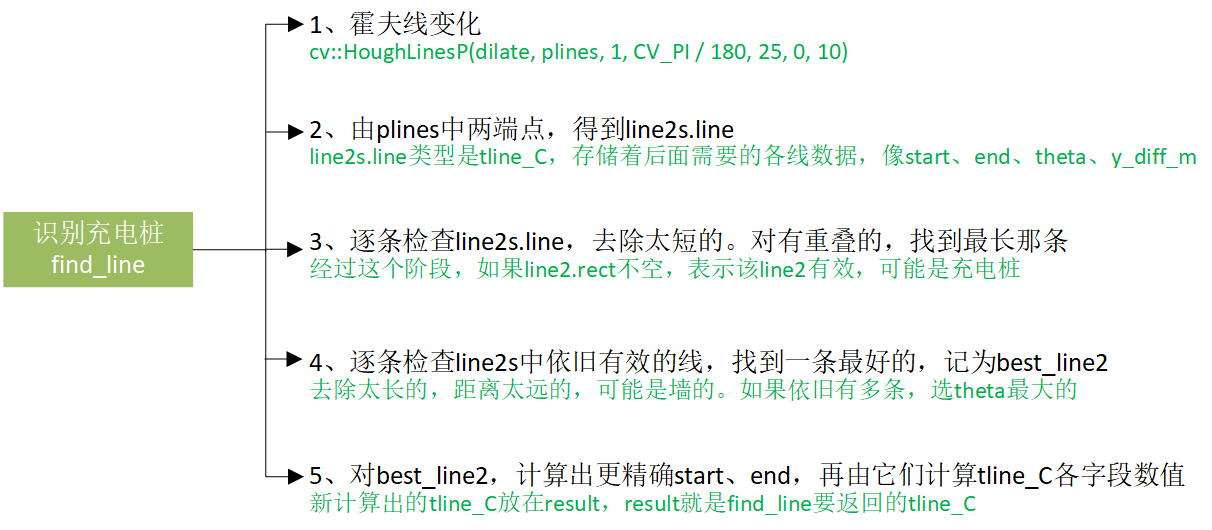
第一步cv::HoughLinesP得到的直线plines,这些直线好多会出现重叠。
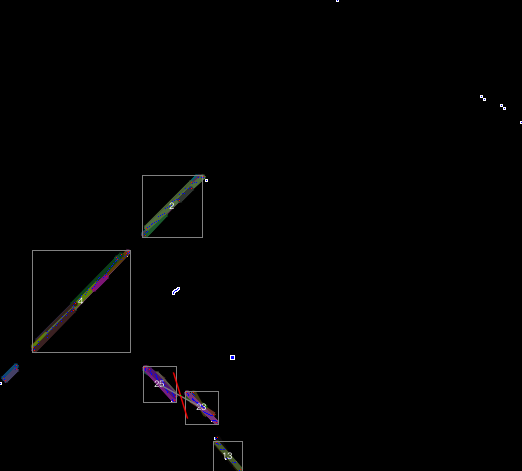
示例找到了32条直线,上图用一种颜色表示一条直线,为直观,每条直线进行了加粗。让看下索引4直线,它和好多条有重叠。是充电桩的直线23,内中也有几条。免得这种“更短”直线产生干扰,在第3步,对有重叠的,要找出最长那条。于是第3步后,可能是充电桩的就剩2、4、13、23、25。
第4步,要从剩下5条中选出最好的。因为line.width_m太长,可去掉2、4。剩下3条,23是充电桩,靠着墙放,25、13分别是左、右两侧墙体。结合上图,具体看怎么区分23、25哪是墙、哪是充电桩。
- 变量23_center表示23直线的中心坐标,25_center则是25的。在两坐标连出一条线(图中灰白线),并算出该线的中心坐标center,即图中绿点。
- 变量23_theta表示23直线角度,25_theta则是25的,算出这两角度平均值theta,abs_theta是theta的绝对值。
- 让23_center、25_center绕着绿点(center)顺时针旋转(90-abs_theta)度。旋转后,23、25都是变得会近乎垂直。
- 变量23_center2表示23_center旋转后的值,25_cener2则是25的,分别是图中红线的两个端点。比较23_center2.x、25_center2.x,大的那一个是充电桩,否则是墙。
此示例是只要去掉13、25这两墙,就剩充电桩了,但实际场景肯定会出现还有多条满足充电桩宽度的直线。这时就选theta最大的。原因是不论前进还是后退,机器人总是尽量保持垂直充电桩,于是认为theta大的更可能是充电桩。这里可能是那些和充电桩垂直的墙。
第5步,要计算更精确的线(tline_C)数值,首先是start、end。之前这两坐标来自cv::HoughLinesP(),这次要依据点云中的雷达点。查找是这么个过程。
- 走出一条从start到end的直线,从这条线生成个灰度图mat:check_2th_mat。
- 对check_2th_mat,也就是这条线涉及到的点,以半径4作膨胀,生成一个dilate2_mat。
- 在dilate2_mat,对它的非0像素,对比雷达点云mat,找到更准确的start、end。找到的start、end一定是点云中某个点的坐标。用它们重新生成result。result就是fine_line要返回的tline_C。
2.4 消除抖动
- 雷达两次扫描时,即使障碍物一模一样,得到的各点坐标依旧会有偏差。
- 机器人正移动时,充电桩位置会出现变动。后面对准逻辑须要等机器人不动后,再执行。
- 某次find_line找到的result,其实不是充电桩。
为消除这些随机问题,需要有个除抖动机制。方法是内部维护个tline_C数组line_samples_[ltype_vel]。如果连续4次result,它们的start_dist_m、end_dist_m误差不超过3cm,那认为找到的result是充电桩、而且机器人不在移动。
此时line_samples_[ltype_vel]存储着最近4条tline_C,后面对准时只须要一条,那要选哪条。直观想到是取四条的平均值,的确,大都是这样,但有意外。假设最近四条的theta是以下四个数值(单位是度)。
{-88.994, -88.994, -88.994, 88.958} ==> 平均值:-44.506theta绝对值在90度时,会出现正、负角度摇摆,此时若计算角度平均值,就出错了。如果四条中同时出现正负theta,改为选最后一条用于对准。
三、对准充电桩
- y0对齐。机器人雷达中心的y尽量对齐充电桩中心的y。两个都是中心,于是叫y0。
- 垂直对齐。机器人尽量和充电桩垂直。
对准充电桩,说来就是要同时做到y0对齐和垂直对齐。反应到数值上,如果达到abs_y_diff_m不大于2cm,那认为y0对齐了。abs_to_90_theta_deg(夹角)不大于15度,那认为垂直对齐了。
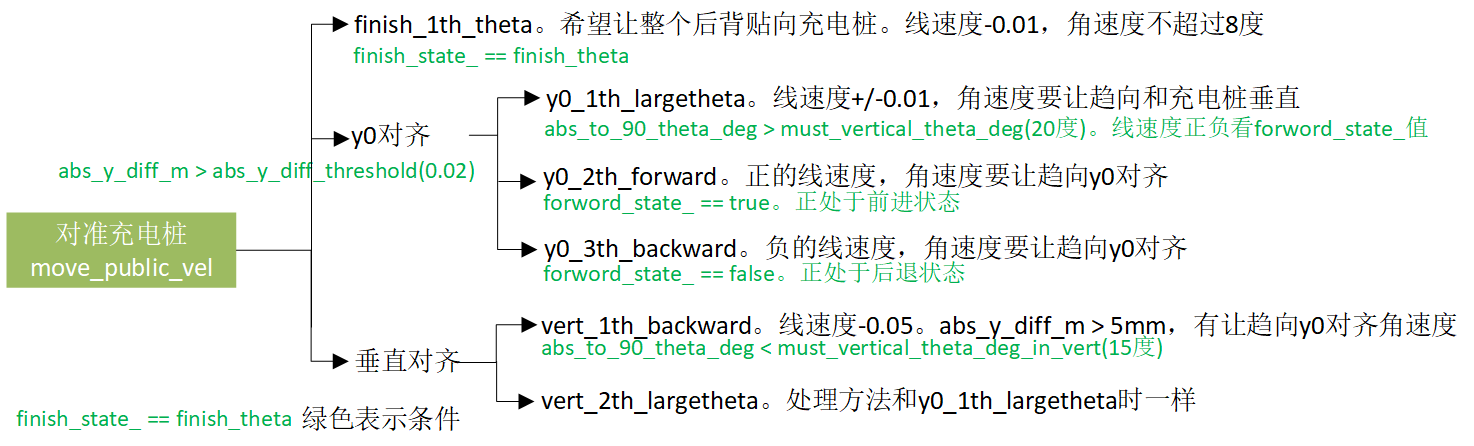
已连续三个移动周期,充电桩位置不变,abs_y_diff_m不大于2cm,并且夹角小于15度,为什么还不认为已在充电?——机器人要能充电,须要整个后背都碰到充电桩,而不能只是有某个点碰上了,但依然有个小角度。为此在即将要充电时,再分两阶段,finish_theta(对应图中finish_1th_theta)和finish_finished。先进入finish_theta,此时只是认为至少一个点和充电桩碰到,而不是整个后背。这时让试着转一个最多8度的角度,线速度则固定用-0.01。如果之后连着三个移动周期后,充电桩位置都没变,才认为整个后背碰上了。于是进入finish_finished阶段,同时认为已在充电。
只要abs_y_diff_m超过2cm,就要进入y0对齐。y0对齐分支下分三种处理。
- y0_1th_largetheta。当前夹角太大了,必须先减少夹角。虽然放在y0对齐,但它做的其实是垂直对齐的事。
- y0_2th_forward。正处在向前移动,同时让机器人y0向充电桩y0靠拢,宁可增大夹角。
- y0_3th_backward。正处在向后移动,同时让机器人y0向充电桩y0靠拢,宁可增大夹角。
2th、3th都要让机器人y0向充电桩y0靠拢,至于此次移动把夹角增得过大了,那由收到下个雷达点云时,发现角度过大了,由1th进行弥合。
布尔变量forword_state_用于表示机器人当前是处在要向前移动,还是向后移动。从充电桩到雷达方向,依次划出两个距离,分别叫a线、b线。雷达位置一旦小于a线,forword_state_要变成true。表示机器人得前进。一直前进,过了b线,forword_state_变成false,表示机器人得后退了。
不过,一旦机器人y0、垂直都对齐了,那即使雷达位置小于a线,forword_state_也是false,表示得后退。接下看用forword_state_如何解决一种拉扯情况。
在y0_1th_largetheta,不是用一个能弥补y0对齐的线速度(linear_x),而是用forword_state_来决定线速度的正负。——要是y0_1th_largetheta用上一个弥补y0对齐线速度,那会让1th和后面2th、3th出现前、后拉扯。举个例子,机器人正处在2th_forward,向前移动了一段距离,方向是顺时针。下次雷达点云到来,发现夹角超过了20度,于是进入1th。这时使用的角速度方向得和前面2th时的相反,得是逆时针,同时要弥补y0对齐,线速度得向后退。于是就出现了向前、向后拉址。
为不让出现这种拉扯,采用办法是在1th时,linear_x不再是为弥补y_diff_m,而是使用一个很小的0.01,其符号和此时的forword_state_一致。这时说来只须要转动角度就行,没必要给线速度。依旧给线速度原因,是一些底盘,当改变linear_x方向时,第一次相反时的移动会出现机器人就不动,或只有一个比期望值小得多的速度。有个方向不变的小速度,或许能减缓这种“呆滞”。虽然只有0.01,但这个linear_x难免会加大y_diff_m,不过期望后面的forward/backward会弥补回来。
设想下机器人向后移动,小于了a位置,并且没做到y0、垂直同时对齐,于是forword_state_变成true,改为向前移动。按forword_state_,下次极可能也是向前,于是也用forword_state_解决了在a位置可能出现的前、后拉扯。
四、调试充电任务
充电逻辑涉及较多参数,有些还是经验值。你可能希望看到修改参数后结果,对此增加了些方便调试的功能。要调试,必须修改源码、然后重编译,只适合开发者。
请在windows下调试。
4.1 让game_config::is_dbg_charge()返回true
<apps>/external/3rdparty/rose_config_3rdparty.cpp ------- const uint32_t dbg_flags = DBG_FLAG_CHARGE;
修改dbg_flags初始值,至少带DBG_FLAG_CHARGE标记,game_config::is_dbg_charge()便会返回true。一旦is_dbg_charge()是true,launcher行为会有以下改变。
- game_instance::app_did_navigation_bh_use_cpp。在cfg_task.type == aplt::task_charge时,会调用ros_instance_.stop_dwa_local_planner_node(),使得在导航到指定位置后,结束三个node:cartographer_occupancy_grid、cartographer、move_base。免得调试充电任务时,这三个node输出日志,干扰查看。
- tmap_scene::did_run_state_changed。enable_teleop_when_map_viewer会变成true。让有后台任务导航时,“地图”窗口会显示发送速度框。
- 在MoveBase,不论充电前要去哪个位置,会不移动,并立即返回成功。
- tleagor_charge_api::move_public_vel。disble_public_vel值会是true,由于是true,此函数实际不发送速度。
有了以上改变后,你改为做以下操作去调试充电过程。
- 在“中心”,执行“充电”。由于上面的(3),机器人不用移动,便认为成功移动了指定位置。接下立即执行小程序提供的“充电”任务。
- 打开“地图”,在output,通过查看move_public_vel()输出日志,知道此次计算出的是啥速度,右下角速度面版切到“自定义”,改由这里发送速度。
- 每发送一个速度,评估相关结果。
4.2 抓取某个的点云,然后针对此点云调试
- 在find_line(),得到best_line2后,设置断点,像“if (best_line2 != nullptr) {”这一行。
- 在did_scan_subscribed,让msg_type值是msg_write。
- 在“中心”,执行“充电”。触发1)设置的断点后,看output输出,看是不是你想要调试的点云。如果不是,结束此次、再次执行充电,直到抓到一个。
- 在did_scan_subscribed,让msg_type值是msg_read。此后使用的点云将总是你上次抓取的点云。
msg_write后,点云被存储在<RoseApp>/launcher/aplt_leagor_basic__documents/LaserScan.msg。可以把这文件改名,等将来再用。
“测试数据”中“charge”目录放有数个点云文件,文件名格式:LaserScan-[xxxxx].msg。可以把下载它们,然后重命名为LaserScan.msg,本机看结果。当中LaserScan-example.msg对应着本文示例。