
- Ros先后提供了两个和tf相关的功能包:tf、tf2。开发者应该使用tf2,放弃用tf。
- tf使用了ros的topic机制。要发布tf的node,发布名叫“/tf”或“/static_tf”的话题。对“/static_tf”,为确保接收者能够收到,往往采用周期性发送。
- 订阅者收到/tf、/tf_static后,BufferCore::setTransform会确保让存在child_frame_id的那个frame,并把此个变换存储到该frame。对header.frame_id,则只是frameIDs_增加一项,不能保证有存储对象。
- 对BufferCore来说,对/tf_static、/tf的不一样处理表现在不同的存储方式。/tf_static时,StaticCache的storage_就是个TransformStorage,新变换来时整个替换。/tf时,TimeCache的storage_是个按时间戳排序的std::deque,队列头是最近发生的变换,队列中单元有着一样的child_frame_id_,但frame_id_可能不一样。(如果出现不一样是不是表示编程出错?)
- tf常出现两种变量名:target_id/frame、source_id/frame,它们用于表示一次坐标变化涉及的到两个坐标系。具体到tf树中位置,靠近根的是target_id,远离根的是source_id。在geometry_msgs::TransformStamped,target_id对应header.frame_id,source_id对应child_frame_id。
- 只要target_frame、source_frame都在tf树中,那它们就是可变换,canTransform返回true。对两个frame参数,并没有要求target_frame一定要离根更近的那个,但用离根更近那个的话,可以些许提高些效率。
TF是一个让用户随时间跟踪多个坐标系的功能包。它使用树形数据结构,根据时间缓冲并维护多个坐标系之间的坐标变换关系,可以帮助开发者在任意时间、坐标系间完成点、向量等坐标的变换。
一、topic机制
tf的发布和接收使用了ros的topic机制。要发布tf的node,发布名叫“/tf”或“/static_tf”的话题,要接收tf变换的则订阅这两个话题。随着各自订阅不断收到tf,那些个接收tf的node都自个存储了“整个”tf树,也就实现了去中心化。“整个”加引号是因为对“/tf”,某个node只能收到它开始订阅“/tf”后的那个些tf,当然对使用tf目的来说,关心的往往是最近很短时间内的tf,丢失些历史tf不影响使用。“/static_tf”只有一种变换,而且会周期发送,实际使用中反而不会丢。
对要接收tf的node,第一步是构造一个tf::TransformListener对象。构造时会依次执行两个操作。
- 订阅“/tf”、“/static_tf”
- 启动一个线程:TransformListener::dedicatedListenerThread。
为调用“/tf”、“/static_tf”设置的回调函数,TransformListener使用CallbackQueue机制,对应的变量是tf_message_callback_queue_。是在dedicatedListenerThread线程调用tf_message_callback_queue_.callAvailable,因而也是在该线程执行收到tf后的回调函数。
二、“/tf”还是“/static_tf”
tf发布者发布变换可使用两种话题:“/tf”、“/static_tf”。使用哪种的判断依据是此坐标变换是否会随着时间而变动。
- /tf:动态的位置关系发布到此topic。动态指的是运行时会发生变动的坐标系变换。
- /tf_static:固定的位置关系发布到此topic,固定指是运行时不会发生变动的坐标系变换。
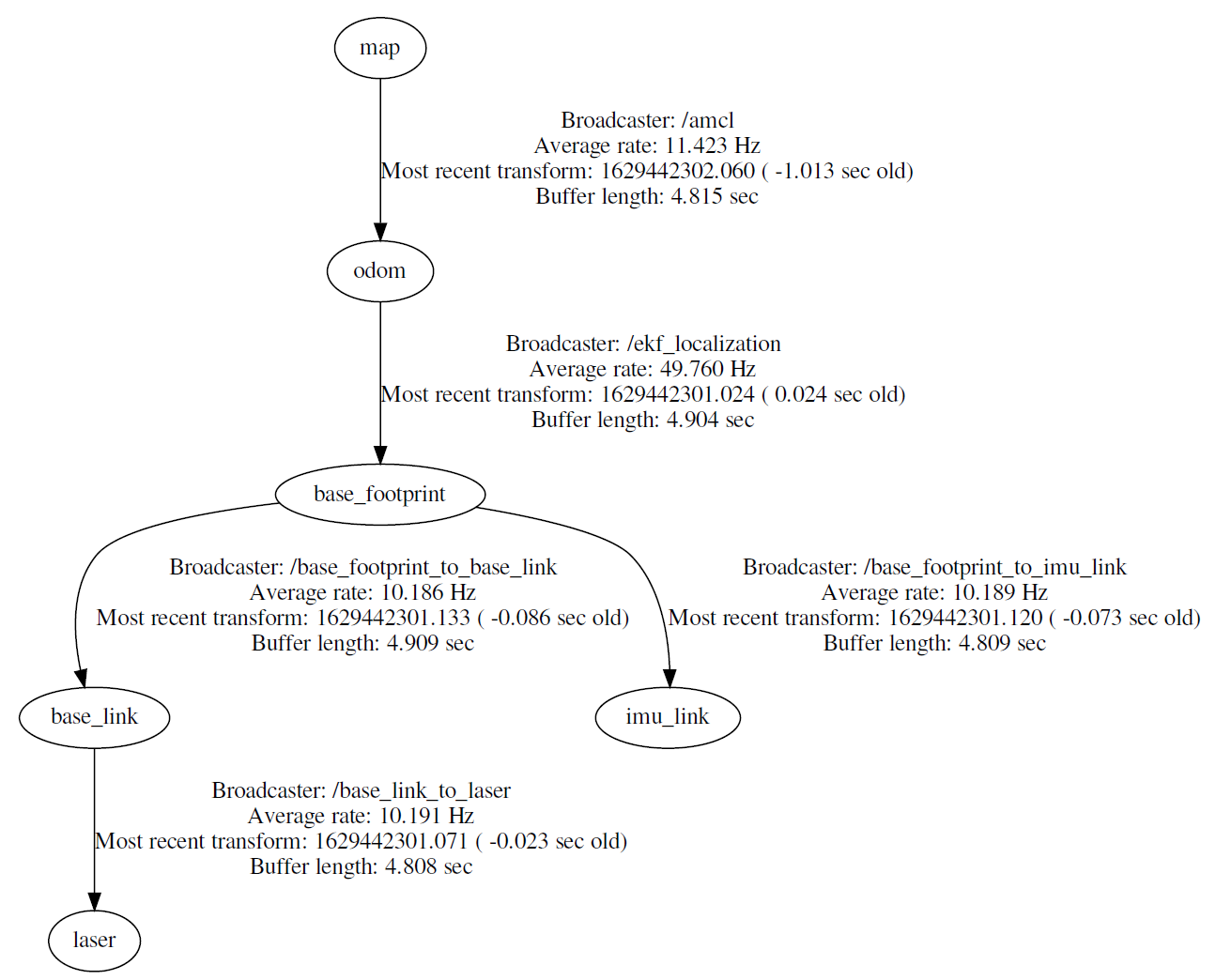
在图2,[map, odom]、[odom, base_footprint],它们的坐标变换会随着时间而变动,使用“/tf”,其它的则使用“/static_tf”。
使用“/static_tf”会有个疑问:如果tf发布时刻,希望接收该tf变换的node还没订阅“/static_tf”,那该node是否就接收不到这个tf变换?——极有可能是。举个例子:/base_link_to_laser发布[base_link, laser],/amcl希望知道这个变换,如果/base_link_to_laser发布时/amcl还没订阅“/static_tf”,那/amcl极可就收不到那次变换。以下是原因。
- “/static_tf”使用的是topic机制,topic没有缓存历史记录功能。
- topic不能说没缓存,若advertise时参数latch设为true,会缓存最后一次记录。而“/static_tf”恰是把latch设为了true。所以会存在这么个现象,如果/amcl订阅“/static_tf”时刻,[base_link, laser]是最后一次发布的,那/amcl会收到,否则就收不到。
实际编程时,很难保证/acml订阅时发布的最后一个“/static_tf”是啥,还有,系统在运行多线程,不能奢望/amcl订阅时/base_link_to_laser一定已发布那次tf了。为解决这些问题,“/static_tf”往往不会是只发送一次,会是采取周期性发送。static_transform_publisher中的period_in_ms就是设置那发送间隔用的。
三、存储tf变换:BufferCore::setTransform
不论是“/tf”,还是“/static_tf”,订阅者收到变换消息后,会调用BufferCore::setTransform,setTransform是存储变换的核心函数。
由于会同时存在N个tf::TransformListener,虽然某个tf只发布了一次,但是会调用了N次BufferCore::setTransform存储这个tf,这N次的BufferCore应该是不同对象。
<libros>/geometry2/tf2/src/buffer_core.cpp
------
@transform_in。发布者发布的坐标变换。
@authority。发布者在connection_header["callerid"]字段设置的名称。如果没指定名称,取固定值“unknown_publisher”。
@is_static。true:来自/tf_static话题。false:来自/tf话题。
bool BufferCore::setTransform(const geometry_msgs::TransformStamped& transform_in,
const std::string& authority, bool is_static)
{
geometry_msgs::TransformStamped stripped = transform_in;
...
// 判断transform_in参数是否合法,不合法就返回false。
if (error_exists)
return false;
{
boost::mutex::scoped_lock lock(frame_mutex_);
CompactFrameID frame_number = lookupOrInsertFrameNumber(stripped.child_frame_id);
TimeCacheInterfacePtr frame = getFrame(frame_number);
if (frame == NULL)
frame = allocateFrame(frame_number, is_static);
std::string error_string;
if (frame->insertData(TransformStorage(stripped,
lookupOrInsertFrameNumber(stripped.header.frame_id), frame_number), &error_string))
{
frame_authority_[frame_number] = authority;
}
else
{
CONSOLE_BRIDGE_logWarn((error_string+" for frame %s at time %lf according to authority %s").c_str(),
stripped.child_frame_id.c_str(), stripped.header.stamp.toSec(), authority.c_str());
return false;
}
}
testTransformableRequests();
return true;
}在分析setTransform前,让解释BufferCore常出现的两个变量名:target_id、source_id。一次坐标变化会涉及到两个坐标系,target_id、source_id就是此次变换涉及到的两个坐标系,值是string类型,像图1中的“map”、“laser”、“base_link”,等等。具体到某个变换,像laser和odom之间,哪个是target_id,哪个是source_id?——靠近根的是target_id,远离根的是source_id。为什么target_id更靠近根?——在tf树,叶子更多表示可直接获取数据源的传感器,像激光雷达(lawer)、IMU(imu_link),这些不同坐标系,终究要“归一化”到某个坐标系,一个称为世界的坐标系。实际使用时,世界坐标系可能不叫world,像图1就叫“map”。但不影响“map”是那个终级坐标系,是那个最后的target,于是在变化时,能更靠近“map”的归为target_id。
transform_in类型是geometry_msgs::TransformStamped,它里面存着两个坐标系:header.frame_id和child_frame_id,以下是它们和target_id、source_id的对应关系。
| geometry_msgs::TransformStamped | 习惯名称 |
| header.frame_id | target_id |
| child_frame_id | source_id |
接下分析setTransform执行的操作
2.1、判断参数是否合法
主要判断的参数是transform_in,像transform_in中存储旋转的rotation必须是归一化后的四元数。参数不合法就忽略此次变换,返回false。
2.2、查找child_frame_id,没有就添加
lookupOrInsertFrameNumber负责执行查找并添加。
typedef uint32_t CompactFrameID;
class BufferCore
typedef std::unordered_map<std::string, CompactFrameID> M_StringToCompactFrameID;
M_StringToCompactFrameID frameIDs_;
typedef std::vector<TimeCacheInterfacePtr> V_TimeCacheInterface;
V_TimeCacheInterface frames_;
};
<libros>/geometry2/tf2/src/buffer_core.cpp
------
CompactFrameID BufferCore::lookupOrInsertFrameNumber(const std::string& frameid_str)
{
CompactFrameID retval = 0;
M_StringToCompactFrameID::iterator map_it = frameIDs_.find(frameid_str);
if (map_it == frameIDs_.end())
{
retval = CompactFrameID(frames_.size());
frames_.push_back(TimeCacheInterfacePtr());//Just a place holder for iteration
frameIDs_[frameid_str] = retval;
frameIDs_reverse.push_back(frameid_str);
}
else
retval = frameIDs_[frameid_str];
return retval;
}lookupOrInsertFrameNumber以frameid为key在frameIDs_中查找,找到就返回该key对应的整数标识,否则向frameIDs_新增一个[key, value],并返回value。
frameIDs_数据结构是unordered_map,即不排序的map。key是tf变化的frame_id,value是一个整数值。frameIDs_固定有一个key是“NO_PARENT”的frame,它的value是0。value=0是个特殊值,1)它总是frameIDs_第一个单元的值。2)函数lookupFrameNumber(frameid_str)返回时,它用于表示参数frameid_str对应的frame不存在。
frameIDs_中的单元数只会增长,不会erase。
2.3、确保frames_中有对应的TimeCacheInterfacePtr对象
第二步添加到frameIDs_,只是记录child_frame_id这个字符串的frame来过了,接下是保存此次变换的数据。那数据保存在哪里?——frames_。
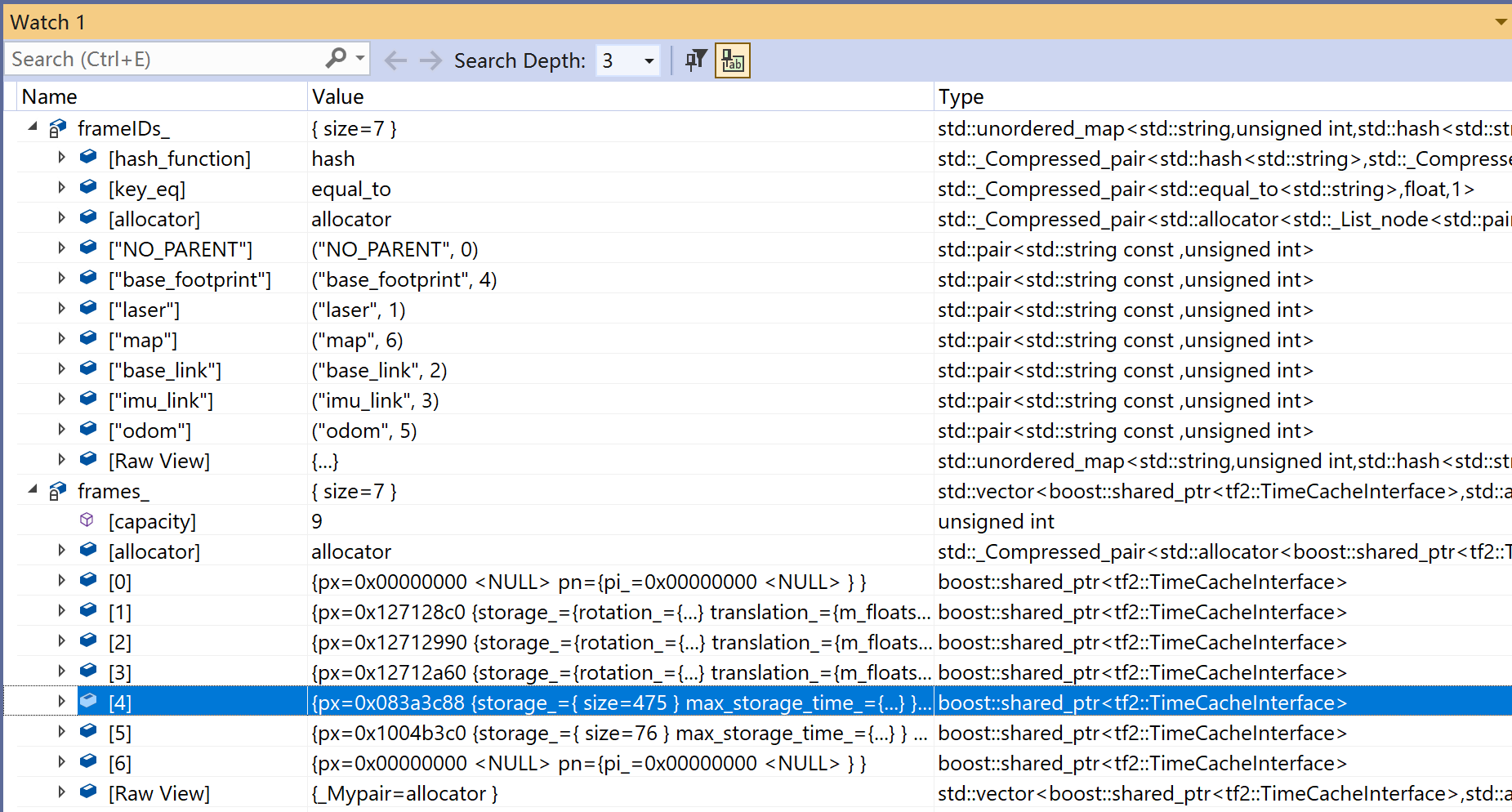
frames_数据结构是std::vector<TimeCacheInterfacePtr>,正如图2显示,长度总和frameIDs_一致,索引则对应frameIDs_中的value值。
变换数据将存储在frames_[n],根据is_static是true还是false,frames_[n]可能是两种类型:StaticCache、TimeCache。
TimeCacheInterfacePtr BufferCore::allocateFrame(CompactFrameID cfid, bool is_static)
{
TimeCacheInterfacePtr frame_ptr = frames_[cfid];
if (is_static) {
frames_[cfid] = TimeCacheInterfacePtr(new StaticCache());
} else {
frames_[cfid] = TimeCacheInterfacePtr(new TimeCache(cache_time_));
}
return frames_[cfid];
}已确保frames_[n]有效后,接下就是调用frame->insertData把此次变换放进TimeCacheInterfacePtr。
frame->insertData(TransformStorage(stripped, lookupOrInsertFrameNumber(stripped.header.frame_id), frame_number),
&error_string)/tf_static时,StaticCache把数据存放在“TransformStorage storage_”,storage_就是个TransformStorage,insertData直接整个替换。
/tf时,storage_是个按时间戳排序的std::deque,队列头是最近发生的变换。对deque中的单元,因为frames_[n]中的n是child_frame_id,所以它们的child_frame_id_是一样的,但frame_id_对应header.frame_id,有可能不一样。
三、清空缓存:BufferCore::clear()
BufferCore::clear()只是清空缓存,不清空存储frame信息的成员变量,像frameIDs_、frames_。
只清空缓存也是有用的。launcher在一次导航结束后,就会调用clear()清空缓存,避免再次启动导航时,这些过时的tf导致各坐标系间依旧可转换。接下会说,即使BufferCore::frmaeIDs_已存在target_frame、source_frame,只要缓存是空,这时canTransform会也是返回false。
四、BufferCore::canTransform
tf的一个常用操作是要判断树中两个frame之间是否可转换。Buffer、BufferCore都提供了canTransform,作为派生类的Buffer多带一个参数timeout。
- time。要求tf的必须发生时刻。time不是0时,缓存中存在发生时刻>=time的tf才算有tf。time是0时,树中有过一个tf就行,不必在乎发生时刻。如果source_frame到target_frame的所有变化都是静态变化,忽略该参数。
- timeout。如果当前坐标不可变换,最多等待的时间。内部会以timeout/100的时间片进行sleep。如果timeout是0,则不等待,只看第一次BufferCore::canTransform的处理结果。
- 返回值。如果target_frame、source_frame之间可变换,返回true,否则false。BufferCore::frmaeIDs_已存在target_frame、source_frame,刚调用过BufferCore::clear()把tf缓存清空了,这时canTransform会返回成功吗?——不会,由于参数time。time不是0时,要求缓存必须存在发生时刻>=time的tf。time是0时,要调用getLatestCommonTime得到缓存中最新发生的tf,由于没有tf,这函数要返回失败。也就是说,不论time是何值,都要求缓存不能是空。
bool Buffer::canTransform(const std::string& target_frame, const std::string& source_frame,
const ros::Time& time, const ros::Duration timeout, std::string* errstr) const
{
...
// poll for transform if timeout is set
ros::Time start_time = now_fallback_to_wall();
const ros::Duration sleep_duration = timeout * CAN_TRANSFORM_POLLING_SCALE;
while (now_fallback_to_wall() < start_time + timeout &&
!canTransform(target_frame, source_frame, time) &&
(now_fallback_to_wall()+ros::Duration(3.0) >= start_time) && //don't wait when we detect a bag loop
(ros::ok() || !ros::isInitialized())) // Make sure we haven't been stopped (won't work for pytf)
{
sleep_fallback_to_wall(sleep_duration);while块的作用就是延时,最坏情况延时timeout秒。为做到更精准延时,不能一个sleep(timeout)就了事。要把它分为粒度更小的时间片sleep_duration。CAN_TRANSFORM_POLLING_SCALE用于决定怎么个分法,默认值0.01。举个例子,timeout值是1秒,时间片sleep_durationy就是10毫秒。假设100毫秒后source_frame-->target_frame变得可转换,那理论上10次while就够了,延时时间可基本等于100毫秒。
计算条件时要执行不带参数timeout的canTransform,和while块后的canTransform一样,是基类BufferCore的BufferCore::canTransform。
now_fallback_to_wall()值就是Time::now(),因而当参数timeout是0时,第一次while就不满足条件了。换句话说,timeout是0时,只会执行一次BufferCore::canTransform。
} bool retval = canTransform(target_frame, source_frame, time, errstr); conditionally_append_timeout_info(errstr, start_time, timeout); return retval; }
从上面可看到,判断是否可转换的核心逻辑是BufferCore::canTransform,后者主要通过walkToTopParent。
- f:函数执行过程中需要调用些会有“特定于场景”的操作,像gather、accum、finalize。f是一个封装了这些操作的一个对象。目前有两种F,用于只判断是否可转换(BufferCore::canTransform)的CanTransformAccum、用于获取tf(BufferCore::lookupTransform)的TransformAccum。BufferCore把F定义为模板类。依我做法,会把F定义一个基类,然后有虚函数gather、accum、finalize。CanTransformAccum、TransformAccum则是它的派生类。。
- target_id:target_frame在frameIDs_中的value。
- source_id:source_frame在frameIDs_中的value。
/geometry2/tf2/src/buffer_core.cpp
------
template
int BufferCore::walkToTopParent(F& f, ros::Time time, CompactFrameID target_id,
CompactFrameID source_id, std::string* error_string, std::vector
*frame_chain) const
{
if (frame_chain)
frame_chain->clear();
// Short circuit if zero length transform to allow lookups on non existant links
if (source_id == target_id)
{
f.finalize(Identity, time);
return tf2_msgs::TF2Error::NO_ERROR;
}
//If getting the latest get the latest common time
if (time == ros::Time())
{
// canTransform、lookupTransform的参数time是0,改为搜索最近发生的那个tf。
int retval = getLatestCommonTime(target_id, source_id, time, error_string);
if (retval != tf2_msgs::TF2Error::NO_ERROR)
{
return retval;
}
}
// Walk the tree to its root from the source frame, accumulating the transform
// 第一次溯源,从“应该”更远离根的source_id开始。
CompactFrameID frame = source_id;
CompactFrameID top_parent = frame;
uint32_t depth = 0;
std::string extrapolation_error_string;
bool extrapolation_might_have_occurred = false;
while (frame != 0)
{
TimeCacheInterfacePtr cache = getFrame(frame);
if (frame_chain)
frame_chain->push_back(frame);
if (!cache)
{
// There will be no cache for the very root of the tree
top_parent = frame;
break;
}
// 可以这么认为,f.gather返回BufferCore::setTransform时,child_frame_id是frame时的header.frame_id
CompactFrameID parent = f.gather(cache, time, error_string ? &extrapolation_error_string : NULL);
if (parent == 0)
{
// 此个frame没有父frame。有三种情况。
// 1)它没法到达该tf树的根。2)它就是tf树的根。3)是/tf,时间戳不符合条件。
// Just break out here... there may still be a path from source -> target
top_parent = frame;
extrapolation_might_have_occurred = true;
break;
}
// Early out... target frame is a direct parent of the source frame
if (frame == target_id)
{
// 根幸运,第一次溯源就成功了。
// 为让第一次就成功,source_id要设置为远离根的frame,这样溯源时就能找到离根部更近的target_id。
f.finalize(TargetParentOfSource, time);
只是判断是否可变换时(canTransform),f.finalize是空操作。获取tf时(lookupTransform),f.finalize作用是把最终tf赋值给result_vec(平移)、result_quat(旋转),见“7.6”。
return tf2_msgs::TF2Error::NO_ERROR; } f.accum(true);
只是判断是否可变换时(canTransform),f.accum是空操作。获取tf时(lookupTransform),f.accum会用于计算合tf。如果是多阶段,在一次lookupTransform,f.accum会被调用多次,见“7.2、7.3、7.4、7.5”。
top_parent = frame;
// 下一while从此次找到的parent开始
frame = parent;
++depth;
if (depth > MAX_GRAPH_DEPTH)
{
if (error_string)
{
std::stringstream ss;
ss << "The tf tree is invalid because it contains a loop." << std::endl
<< allFramesAsStringNoLock() << std::endl;
*error_string = ss.str();
}
return tf2_msgs::TF2Error::LOOKUP_ERROR;
}
}
...
}只要target_frame、source_frame都在tf树中,那它们就是可变换。这里就有两种可能:1)target_frame是source_frame的父frame,像图1中的odom和laser。2)target_frame和source_frame拥有同一个父frame,像图1中的laser、imu_link。
需要的话,walkToTopParent会进行两次溯源,第一次从“应该”更远离根的source_id开始,第二次从target_id。对BufferCore::canTransform中的参数target_frame、source_frame,并没有要求target_frame一定要离根更近的那个,但用离根更近那个的话,可以让在walkToTopParent时只须一次溯源。举个例子,要判断odom、laser之间是否可变换,虽然target_frame=laser、source_frame=odom时,canTransform也会返回true,但此时walkToTopParent须要两次溯源,若改为target_frame=odom,则只须一次。
walkToTopParent执行过程中,需要调用些会有“特定于场景”的操作,f是CanTransformAccum类的对象。有两种典型场景:1)只是判断两frame间是否可转换:CanTransformAccum。2)获取两frame间变换:TransformAccum。
CanTransformAccum中gather方法是返回参数cache的父frame。这个父frame是BufferCore::setTransform时,传下的header.frame_id。但动态tf时,gather要依赖target_time,当中要涉及TimeCache::findClosest。
以时间戳target_time为参数,在缓存队列中找寻时间上最接近的变换。
uint8_t TimeCache::findClosest(TransformStorage*& one, TransformStorage*& two, ros::Time target_time,
std::string* error_str);
返回值是三种。0:没有找到。1:精确匹配,找到的变化存放在one。2:区间匹配,变化在[one, tow]之间,时间上tow > one。
target_time.isZero时,取最近收到的变换。
缓存中只有一个变化时,该变化的时间必须等于target_time,否则查找失败。
假设缓存最早的时间是earliest_time,最近时间是latest_time,那target_time必须在区间[earliest_time, latest_time],否查找失败。
五、获取tf:BufferCore::lookupTransform
5.1 BufferCore::lookupTransform
lookupTransform用于获取source_frame-->target_frame的tf。通过这个tf,假设a是source_frame下坐标,tf*a就是target_frame下的坐标。当然,它可用于计算多阶段的合tf,像计算图1中base_footprint-->map的tf。类似canTransform,Buffer、BufferCore都提供了lookupTransform,作为派生类的Buffer多带一个参数timeout,timeout语意和canTransform时的一模一样。
参数
- target_frame。通常是靠近根的那个坐标系。
- source_frame。通常是离根远的那个坐标系。
- time。要求tf的必须发生时刻。time不是0时,要获取的tf发生时刻必须>=time,此时存在两种情况。一是缓存中找到个tf,它的发生时刻等于time,那这个tf正是要返回的tf。二是缓存中找不到发生时刻等于time的,但找到两个相邻tf:one、tow,one的发生时刻小于time,tow则大于time,称为区间匹配。这时要根据one、two按比例生成一个新位姿,由这个新位姿生成要返回的tf。time是0时,取最新发生的那个tf。另外,如果source_frame到target_frame的所有变化都是静态变化,忽略该参数。
返回值。geometry_msgs::TransformStamped类型的tf。因为一旦获取失败,都会抛出异常,所以只要正常返回那就是查找成功。
- tf.header.stamp。指示这个tf生产者产生它的时刻,和tf何时存入tf没有关系。值来自参数time。参数time不是0时,header.stamp就等于time。是0时,值等于缓存中最新tf的stamp。图3有说明为什么区间匹配时,tf.header.stamp等于参数time。要计算的是多阶段合tf时,取当中每个阶段tf.header.stamp最小值。也就是说,tf有效时刻取决于当中各子tf最早发生的那个时刻。
- tf.pose。不是区间匹配时,tf的位姿值等于缓存中对应那个tf。是区间匹配时,是由one、two按比例算出的位姿。怎么生成新位姿见图3。
geometry_msgs::TransformStamped BufferCore::lookupTransform(const std::string& target_frame,
const std::string& source_frame,
const ros::Time& time) const
{
boost::mutex::scoped_lock lock(frame_mutex_);
if (target_frame == source_frame) {
...target_frame和source_frame是同一个坐标系
return identity;
}
//Identify case does not need to be validated above
CompactFrameID target_id = validateFrameId("lookupTransform argument target_frame", target_frame);
CompactFrameID source_id = validateFrameId("lookupTransform argument source_frame", source_frame);在frameIDs_映射中,根据key查找出CompactFrameID类型的value。在图2,当作为key的target_frame=="map",那作为value的target_id是6。
std::string error_string; TransformAccum accum; int retval = walkToTopParent(accum, time, target_id, source_id, &error_string);
要从tf树得到tf,不是简单地像canTransform判断能不能变换了,F需要复杂点的TransformAccum。经过walkToTopParent,retval是TF2Error::NO_ERROR时表示成功得到tf,此时accum存储着得到的tf。
if (retval != tf2_msgs::TF2Error::NO_ERROR) {walkToTopParent失败,在这里会用throw抛出异常
} geometry_msgs::TransformStamped output_transform; transformTF2ToMsg(accum.result_quat, accum.result_vec, output_transform, accum.time, target_frame, source_frame);
walkToTopParent成功,此时accum.result_quat存储tf的旋转数值,accum.result_vec则是tf的偏移数值。accum.time是参数time经过调整的值,具本如何赋值见上面“返回值”描述中的tf.header.stamp。
transformTF2ToMsg逻辑很简单,5个参数直接赋值,最终生成要返回的geometry_msgs::TransformStamped类型的tf。
return output_transform;
}
void transformTF2ToMsg(const tf2::Quaternion& orient, const tf2::Vector3& pos,
geometry_msgs::TransformStamped& msg, ros::Time stamp, const std::string& frame_id, const std::string& child_frame_id)
{
transformTF2ToMsg(orient, pos, msg.transform);
msg.header.stamp = stamp;
msg.header.frame_id = frame_id;
msg.child_frame_id = child_frame_id;
}为加深理解walkToTopParent是如何生成tf,让查看个区间匹配时现场。区间匹配时,TimeCache::findClosest返回等于2,发生时间在[one, tow]之间,时间上tow > one。
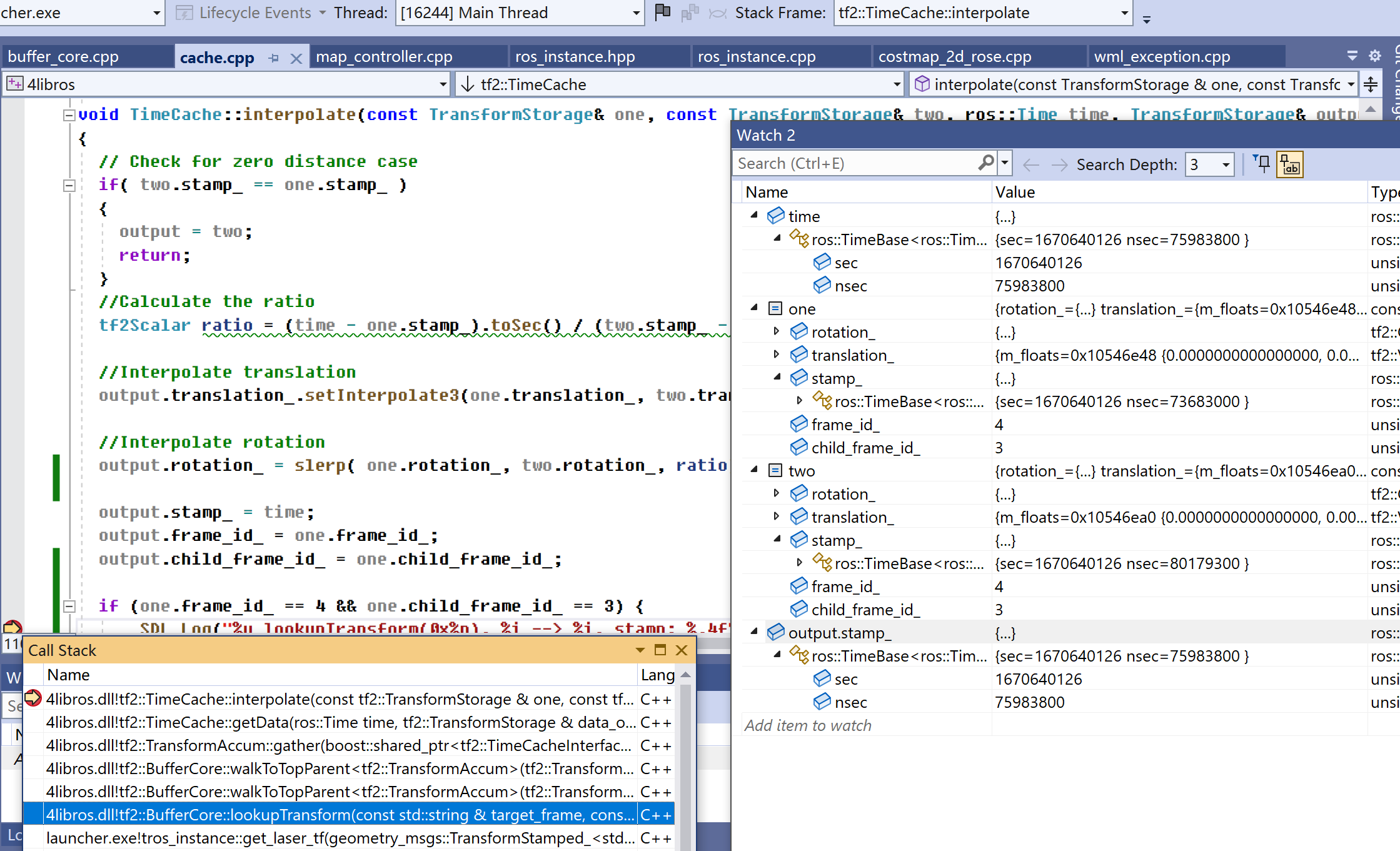
lookupTransform参数time的值是1670640126.75983800,正如图3所示,它赋值给了interpolate的参数time。在缓存TimeCache,找到time是在[one(1670640126.73683000), two(1670640126.80179300)]之间。那TimeCache::interpolate是如何生成要返回的tf?即参数中TransformStorage类型的output。
- output.translation_。tf平移部分用setInterpolate3,基于one、two按比例生成。
- output.rotation_。tf旋转部分用slerp,基于one、two按比例生成。
- output.stamp_ = time。时间戳赋值为lookupTransform给定的参数time。
5.2 返回值tf中的tf.header.stamp
上面已说过,tf.header.stamp指示这个tf生产者产生它的时刻,和tf何时存入tf没有关系。如果tf是一次变换,像从base_footprint-->odom,或odom-->map,那stamp较好理解。对应到代码,就是上面BufferCore::setTransform第一个参数transform_in中的header.stamp,
如果tf是两个甚至多个相乘出来,像base_footprint-->map,取当中每个阶段tf的最小值。也就是说,tf有效时刻取决于当中各子tf最早发生的那个时刻。
调用者有时须要读取这时间戳。举个例子,机器人坐标是base_footprint,世界坐标系是map。对base_footprint-->map的tf,如果最新tf已经距离现在有段时间了,而机器人是动的,间隔一长,tf就不能反应当前位姿。这时遇到太老的tf就要认为无效。Costmap2DROS::getRobotPose就有这逻辑,变量transform_tolerance_存储着间隔阈值,默认0.5秒。
<libros>/include/tf2_ros/buffer_interface.h
------
class BufferInterface
{
template <class T>
T& transform(const T& in, T& out,
const std::string& target_frame, ros::Duration timeout=ros::Duration(0.0)) const
{
// do the transform
tf2::doTransform(in, out, lookupTransform(target_frame, tf2::getFrameId(in), tf2::getTimestamp(in), timeout));
return out;
}
};
<libros>/costmap_2d/src/costmap_2d_rose.cpp
------
bool Costmap2DROS::getRobotPose(geometry_msgs::PoseStamped& global_pose) const
{
tf2::toMsg(tf2::Transform::getIdentity(), global_pose.pose);
geometry_msgs::PoseStamped robot_pose;
tf2::toMsg(tf2::Transform::getIdentity(), robot_pose.pose);以上这个tf2::toMsg作用的是让位姿robot_pose.pose等于“0”。“0”位姿时,坐标position等于0,对旋转部分,用四元数orientation表示0是(0, 0, 0, 1)。
robot_pose.header.frame_id = robot_base_frame_; robot_pose.header.stamp = ros::Time(); ros::Time current_time = ros::Time::now(); // save time for checking tf delay later
getRobotPose目的是要求出机器人中心在/map坐标系下的坐标及角度。怎么求这值呢?
robot_base_frame_是“base_footprint”,global_frame是“map”,要求的是base_footprint-->map的tf。
// get the global pose of the robot
try
{
// use current time if possible (makes sure it's not in the future)
if (tf_.canTransform(global_frame_, robot_base_frame_, current_time))
{
geometry_msgs::TransformStamped transform = tf_.lookupTransform(global_frame_, robot_base_frame_, current_time);
tf2::doTransform(robot_pose, global_pose, transform);进这个入口,意味着在tf树中,至少有存在着发生时间>=current_time的base_footprint-->map的tf。但是,current_time是正是此刻,要突然收到tf,基本没可能。当然,如果有,那就用这个tf计算global_pose。
}
// use the latest otherwise
else
{
tf_.transform(robot_pose, global_pose, global_frame_);回看上面的BufferInterface::transform,此个入口逻辑和上面if块是一样的,只是lookupTransform时把current_time改为ros::Duration(0.0)。换句话说,告诉tf模块,没发生时刻限制了,返回最新的那个tf就行。
两个入口的区别:第一个要求tf发生时间>=current_time,第二个只要求tf最新。由于很难保证tf必须发生在现在,实际运行时往往都进第此个入口。
}
} catch (...) {
return false;
}
// check global_pose timeout
if (current_time.toSec() - global_pose.header.stamp.toSec() > transform_tolerance_) {最新tf距现在超过transform_tolerance_(0.5)秒,而机器人是动的,认为tf已不能反应当前位姿,让此次getRobotPose失败。
return false; } return true; }
六、Buffer::checkAndErrorDedicatedThreadPresent
checkAndErrorDedicatedThreadPresent的作用是判断该TransformListener订阅“/tf”、“/static_tf”时,是否新建一个线程,然后使用了一个独立的CallbackQueue。
bool Buffer::checkAndErrorDedicatedThreadPresent(std::string* error_str) const
{
if (isUsingDedicatedThread())
return true;
if (error_str)
*error_str = tf2_ros::threading_error;
ROS_ERROR("%s", tf2_ros::threading_error.c_str());
return false;
}tf在判断两坐标系是否可转换时(Buffer::canTransform),会先调用它进行判断,是false的话,即没有专门线程、专门CallbackQueue接收tf话题,就强制认为不可转换。为什么?
假设没有专门线程(using_dedicated_thread_=false)。node主线程调用了Buffer::canTransform,为判断是否可转换须要接收tf话题的新msg,因为接收tf msg不在新线程,那只有一种方法,node主线程主动调用cbqueue.callAvailable,可这时要是收到的不是/tf、/tf_static的msg,那该怎么办?举个例子,处理那个话题msg回调中又调用了Buffer::canTransform,会造成递归调用cbqueue.callAvailable,造成不可预料后果。
为此需要有专门线程,并且在那线程只接收/tf、/tf_static。
七、TransformAccum::accum、TransformAccum::finalize。一个lookupTransform示例
TransformAccum::accum在获取tf时执行。“accum”是“accumulate”缩写,字意是累积,accum作用是计算多阶段的合tf。lookupTransform时,只要source_frame、target_frame不一样,至少会调用一次accum,如果出现多阶段,那会多次调用。
TransformAccum::finalize在获取tf时执行。作用是把最终tf赋值给result_vec(平移)、result_quat(旋转)。有了这个结果后,对照看到上的BufferCore::lookupTransform,最后会调用“transformTF2ToMsg(accum.result_quat, accum.result_vec, ...),result_vec、result_quat将做为得到的tf返回给调用者。不管是单阶段,还是多阶段,一次lookupTransform时,finilize只会调用一次。
<libros>/geometry2/tf2/src/buffer_core.cpp
------
struct TransformAccum
{
void accum(bool source)
{
if (source)
{
source_to_top_vec = quatRotate(st.rotation_, source_to_top_vec) + st.translation_;
source_to_top_quat = st.rotation_ * source_to_top_quat;进这个入口,意味着此个从tf树中新搜到的tf(值st),是挨着source端找到的。
这两条语句进行一次位姿变换,可认为等价“tf2::doTransform(source_to_top, source_to_top, st)”,第一个source_to_top是转换前的位姿,第二个source_to_top是左乘st变换后,得到的位姿。
}
else
{
target_to_top_vec = quatRotate(st.rotation_, target_to_top_vec) + st.translation_;
target_to_top_quat = st.rotation_ * target_to_top_quat;
}
}
void finalize(WalkEnding end, ros::Time _time)
{
switch (end)
{
case Identity:
break;
case TargetParentOfSource:
result_vec = source_to_top_vec;
result_quat = source_to_top_quat;下面示例会进这个入口。它就是将accum(source)计算出的结果赋值给result_vec(平移)、result_quat(旋转)。有了这个结果后,对照看到上的BufferCore::lookupTransform,最后会以result_vec、result_quat调用“transformTF2ToMsg(accum.result_quat, accum.result_vec, ...)。
break; ...... }; time = _time; } }
一个多关节机械臂。
| 关节 | origin.xyz | origin.rpy | axis.xyz | parent | child(关节坐标系) |
| joint2 | 0.0005 0.0227 0.0315 | 0 0 0 | 0 -1 0 | link1 | link2 |
| joint3 | 0 0.001 0.105 | 0 0 0 | 0 1 0 | link2 | link3 |
| joint4 | 0.0010378 -0.0015 0.0975 | 0 0 0 | 0 1 0 | link3 | link4 |
| joint5 | -0.027 -0.0222 0.0432 | 0 0 0 | 0 0 -1 | link4 | link5 |
为直观,从上表机械臂各关节坐标系为例,看计算link5到link1的tf,是怎么个过程。这过程要考虑joint5、joint4、joint3、joint2这4个tf。
geometry_msgs::TransformStamped transform = tf2_buffer.lookupTransform("link1", "link5", ros::Time());
7.1 初始时
source_to_top_vec: (0, 0, 0, 0) source_to_top_quat: (0, 0, 0, 1)
source_to_top_vec对应tf中平移部分,因为只有x、y、z,第四个分量总是0。source_to_top_quat对应tf中的旋转部分,是个四元数。
7.2 第一轮accum。st是joint5
st.translation: (-0.027 -0.0222 0.0432) st.rotation_: (0, 0, 0, 1)
st是此次从tf树中新搜到的tf。因为旋转是0,结果就是平移相加。计算后。
source_to_top_vec: (-0.027 -0.0222 0.0432, 0) source_to_top_quat: (0, 0, 0, 1)
7.3 第二轮accum。st是joint4
st.translation(0.0010378 -0.0015 0.0975) st.rotation_(0, 0, 0, 1)
计算后
source_to_top_vec(-0.0259622 -0.0237 0.1407, 0) source_to_top_quat(0, 0, 0, 1)
7.4 第三轮accum。st是joint3
st.translation(0 0.001 0.105) st.rotation_(0, 0, 0, 1)
计算后
source_to_top_vec(-0.0259622 -0.0227 0.2457, 0) source_to_top_quat(0, 0, 0, 1)
7.5 第四轮accum。st是joint2
st.translation(0.0005 0.0227 0.0315) st.rotation_(0, 0, 0, 1)
计算后
source_to_top_vec(-0.0254622 0 0.2772, 0) source_to_top_quat(0, 0, 0, 1)
7.6 f.finalize(TargetParentOfSource, time)
result_vec = source_to_top_vec; result_quat = source_to_top_quat;
于是
result_vec: (-0.0254622 0 0.2772) result_quat: (0, 0, 0, 1)
有了这个结果后,对照看到上的BufferCore::lookupTransform,它最后会调用“transformTF2ToMsg(accum.result_quat, accum.result_vec, ...)作为得到的tf返回给调用者。