
- rose地图、ros地图。“rose地图”专门指场景编程中的地图,“ros地图”则指Ros订阅到的地图。
- raw-rose地图。指栅格尺寸等于1/resolution时的rose地图。举个例子,resolution是0.05时,raw-rose地图就是栅格尺寸等于20时的rose地图。
- rose地图中的一个栅格总是表示一米,
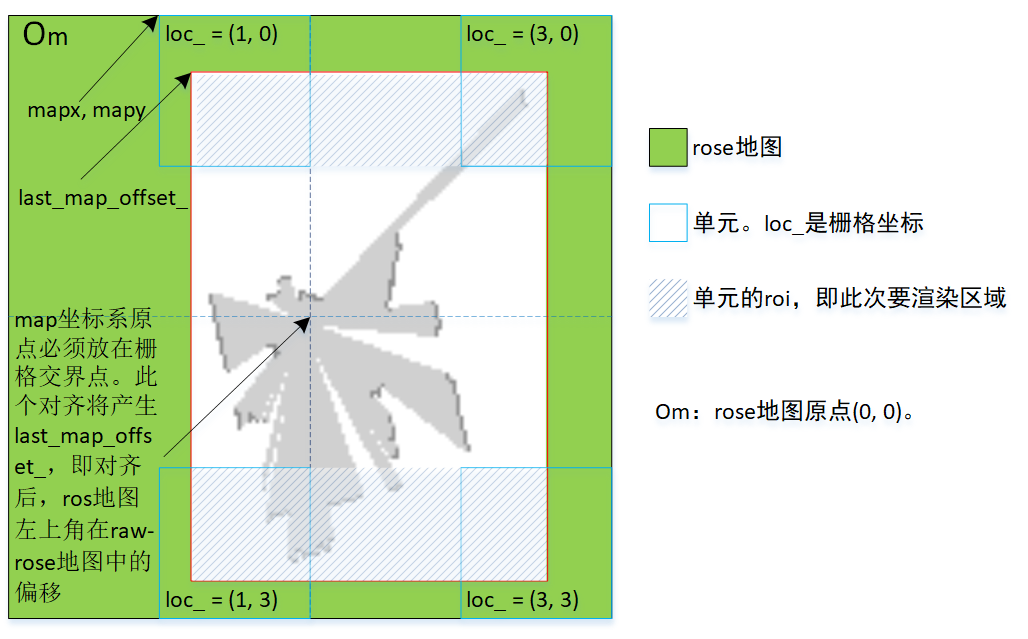
- ros地图放置到raw-rose地图,放置规则有两条。1)以双方的左上角对齐。2)ros地图的map坐标系原点必须放置在raw_rose地图栅格的交叉点。可这样理解放置过程:底下是静止的raw-rose地图,上面是可移动的ros地图,两个地图首先左上角对齐,然后ros地图向右移动,让map坐标系原点的x落在距离最近的两个栅格交叉点;对齐x后,ros地图向下移动,让map坐标系原点的y落在距离最近两个栅格交叉点。移动过程中,rose地图交叉点处栅格的loc_.x、loc_.y不必是UNIT_LOCS整数倍。
一、几个变量
1.1 map_controller
| 变量 | 类型 | 说明 |
| last_map_ | nav_msgs::MapMetaData | 最近一次收到的ros地图 |
| last_map_origin_ | SDL_Point | [ros地图坐标系]map坐标系原点在ros地图中坐标 |
| last_laser_origin_ | SDL_Point | [ros地图坐标系]laser坐标系原点在ros地图中坐标 |
| last_src_gray_ | cv::Mat | 根据最近一次收到的ros地图,提取出的单通道图像 |
| last_map_offset_ | SDL_Point | [raw-rose地图坐标系]ros地图放入raw-rose地图,基于map原点对齐后,ros地图左上角(0,0)在raw-rose地图中的坐标 |
| laser_png_surf_ | surface | laser_origin.png经过最近一次位姿旋转后得出的surface |
| laser_png_rotate_point_ | SDL_Point | [laser_png_surf_坐标系]laser_origin.png中对齐点(14,36)在laser_png_surf_中的坐标 |
| goal_ | move_base_msgs::MoveBaseGoal | 存储长按设置的导航点信息 |
| last_laser_yaw_ | double | 激光雷达在map坐标系下的角度 |
1.2 unit
| 变量 | 类型 | 说明 |
| UNIT_LOCS | 宏(int) | 水平两个、垂直两个,这4个相邻栅格组成一个单元。地图水平、垂直栅格数一定是UNIT_LOCSG整数倍 |
二、unit::app_draw_unit
app_draw_unit是base_unit虚函数,通过重载它,launcher画出各个单元应该的图像。
void unit::app_draw_unit(const int xsrc, const int ysrc)
{
const cv::Mat& full = controller_.last_src_gray();
if (full.rows == 0 || full.cols == 0) {
return;
}
// UNIT_LOCS值是2,表示水平、垂直方向各2个栅格组成一个单元。
const int unit_size = disp_.zoom() * UNIT_LOCS;
const SDL_Point& map_offset = controller_.last_map_offset();
const nav_msgs::MapMetaData& last_map = controller_.last_map();
// 为做到精确,此处要保证“1能被map.info.resolution整除”,这样算出的simple_per_meter不含小数。
const int simple_per_meter = 1 / last_map.resolution;
VALIDATE(simple_per_meter == 20, null_str);
const int simple_per_meters = simple_per_meter * UNIT_LOCS;
// step1:计算图1斜线标识出的roi,但以Om为原点的矩形。即loc{1,0}的roi.x、roi.y是map_offset。
// {mapx, mapy, w, h}是该单元在raw-rose地图中的矩形。
const int mapx = loc_.x * simple_per_meter;
const int mapy = loc_.y * simple_per_meter;
const int w = simple_per_meters;
const int h = simple_per_meters;
if (mapx + w <= map_offset.x || mapx >= map_offset.x + full.cols) {
return;
}
if (mapy + h <= map_offset.y || mapy >= map_offset.y + full.rows) {
return;
}
cv::Rect roi(mapx, mapy, w, h);
if (roi.x < map_offset.x) {
roi.width -= map_offset.x - roi.x;
roi.x = map_offset.x;
}
if (roi.y < map_offset.y) {
roi.height -= map_offset.y - roi.y;
roi.y = map_offset.y;
}
if (roi.x + roi.width > map_offset.x + full.cols) {
roi.width -= roi.x + roi.width - (map_offset.x + full.cols);
}
if (roi.y + roi.height > map_offset.y + full.rows) {
roi.height -= roi.y + roi.height - (map_offset.y + full.rows);
}
VALIDATE(roi.x >= map_offset.x, null_str);
VALIDATE(roi.y >= map_offset.y, null_str);
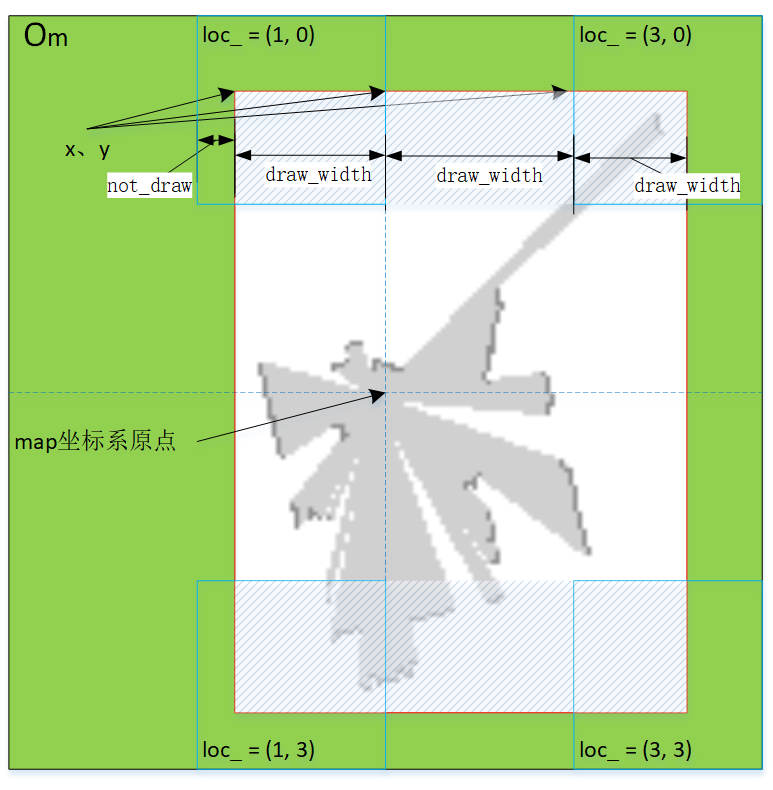
// 图2显示了x、y,它是屏幕坐标系。该单元中的ros地图图像从此坐标开始渲染。
int x = xsrc + (roi.x - mapx) * unit_size / simple_per_meters;
int y = ysrc + (roi.y - mapy) * unit_size / simple_per_meters;
// 图2显示了not_draw、draw_width。
// 要是不做去noise,可能会导致单元右侧或下侧出现1像素空隙
// 造成这个问题的原因是浮点计算的向下取整。不论x还是y,noise非零0时,值只能是1。
int draw_width = roi.width * unit_size / simple_per_meters;
if (roi.x - mapx != 0) {
VALIDATE(roi.x == map_offset.x, null_str);
int roi_x2 = roi.x % unit_size;
if (roi_x2 + roi.width >= w) {
VALIDATE(roi_x2 + roi.width == w, null_str);
// 左侧已有now_draw,必须右侧挤满,才须要计算noise,这就是为什么要使用这个if条件。
// roi_x2、roi.width、w都是raw-rose地图,不经过浮点计算,因而要它们来判断,是否须要加noise。
// 为什么说roi_x2是raw-ros?——它来自于map_offset.x,这值虽然是rose地图,但没有经过浮点计算,值等于图2的not_draw。
// 缩放只发生在draw_width,not_draw部分不发生缩放,因而rose地图的值可直接做为raw-ros的值。
const int gap = xsrc % unit_size;
const int not_draw = (x - gap) % unit_size;
int noise = (unit_size - not_draw) - draw_width;
x += noise;
}
}
int draw_height = roi.height * unit_size / simple_per_meters;
if (roi.y - mapy != 0) {
VALIDATE(roi.y == map_offset.y, null_str);
int roi_y2 = roi.y % unit_size;
if (roi_y2 + roi.height >= h) {
VALIDATE(roi_y2 + roi.height == h, null_str);
const int gap = ysrc % unit_size;
const int not_draw = (y - gap) % unit_size;
int noise = (unit_size - not_draw) - draw_height;
y += noise;
}
}
// step2:roi.x、roi.y归0化,即x、y减去map_offset。
roi.x -= map_offset.x;
roi.y -= map_offset.y;
// 按实际栅格尺寸,放大roi部分的图像
cv::Size cvSize(draw_width, draw_height);
cv::Mat zoomed_gray, argb;
cv::resize(full(roi), zoomed_gray, cvSize);
cv::cvtColor(zoomed_gray, argb, cv::COLOR_GRAY2BGRA);
surface surf(argb);
disp_.drawing_buffer_add(display::LAYER_UNIT_DEFAULT, loc_, surf, x, y, 0, 0);
// step3:绘制map坐标系原点
const SDL_Point& map_origin = controller_.last_map_origin();
// ros坐标系-->raw-ros坐标系。offsetx/offset.y是map坐标系原点在raw-ros坐标系中的坐标。
int offsetx = map_offset.x + map_origin.x;
int offsety = map_offset.y + map_origin.y;
if (point_in_rect(offsetx, offsety, SDL_Rect{mapx, mapy, w, h})) {
surf = image::get_image("misc/map_origin.png");
int deltax = (offsetx - mapx) * unit_size / simple_per_meters - surf->w / 2;
int deltay = (offsety - mapy) * unit_size / simple_per_meters - surf->h / 2;
disp_.drawing_buffer_add(display::LAYER_UNIT_DEFAULT, loc_, surf,
xsrc + deltax, ysrc + deltay,
0, 0);
}
// step4:绘制laser坐标系原点及位姿
const SDL_Point& laser_origin = controller_.last_laser_origin();
offsetx = map_offset.x + laser_origin.x;
offsety = map_offset.y + laser_origin.y;
if (point_in_rect(offsetx, offsety, SDL_Rect{mapx, mapy, w, h})) {
surf = controller_.laser_png_surf();
const SDL_Point& rotate_point = controller_.laser_png_rotate_point();
int deltax = (offsetx - mapx) * unit_size / simple_per_meters - rotate_point.x;
int deltay = (offsety - mapy) * unit_size / simple_per_meters - rotate_point.y;
// laser.png overlay map_origin.png always. use higher layer.
disp_.drawing_buffer_add(display::LAYER_UNIT_MOVE_DEFAULT, loc_, surf,
xsrc + deltax, ysrc + deltay,
0, 0);
}
}simple_per_meter是每米多少个数素,像resolution是0.05时,值是20。由于一个栅格总是表示一米,simple_per_meters则表示raw-rose地图中每单元表示的像素数。
roi(Range Of Interest)指此次某单元要渲染的图像区域,见图1中的斜线标示部分。全是在raw-rose地图计算roi。分两步计算。以loc_{1,0}栅格为列
- 计算出图斜线标示部分,但是以Om为原点的矩形。即loc_{1,0}的roi中x、y是map_offset。
- roi的x、y归0化,即x、y减去map_offset。