
《视觉SLAM十四讲(第二版)》中“6.3.2 使用Ceres进行曲线拟合”有介绍Ceres,本文不少内容抄自哪里。
Ceres是一个广泛使用的最小二乘问题求解库。在Ceres中,我们作为用户,只需按照一定步骤定义待解的优化问题,然后交给求解器计算。Ceres求解的最小二乘问题最一般的形式如下(带边界的核函数最小二乘):
公式1:
我们的任务就是找到一组满足约束的
,使得优化目标函数
取值最小。在Ceres库中,优化参数
被称为参数块(ParameterBlock),它们的取值就是我们要寻找的解。
分别是第
个优化参数
的下界和上界。表达式
被称为残差项(ResidualBlock)。其中,
是代价函数(CostFunction),
则是关于代价函数平方的核函数(LossFunction)。核函数存在的意义主要是为了降低野点(outliers)对于解的影响。
Ceres总逻辑
- 总体计算逻辑是一轮轮迭代。当此轮迭代的残差减去上一轮迭代的残差差值很小时(参考图1中的“absolute_function_tolerance”),认为迭代结束。结束判断条件是残差变化值,不是残差值。
- 如何计算此轮迭代残差。是Problem中,所有残差项(ResidualBlock)计算出的残差之“和”。“和”加引号,因为并不是简单相加。
- 如何计算残差项残差。一个残差项包含一个代价函数(CostFunction),代价函数有一个输出项(成员函数operator()的最后一个参数),它由我们算出传给ceres。
- 如何定义代价函数。operator()参数从左到右分为两类:输入参数和输出参数。输入指的是ceres面向应用,输出则相反。输入往往就是此次非线性优化要计算的最后结果,输出则是上一步所说用于存储残差。
- 对operator()输入、输出参数,它们类型是模板类型T,T实际类型是ceres::Jet。由于这些参数是ceres::Jet类型,一个标量要和它算术运算(加、减、乘、除等)时,须先转成ceres::Jet。转化方法是以标量为参数构造一个Jet对象。举个例子,x是一个double类型变量,它和输入、输出参数作算术运算时,须使用T(x)。
- 一次迭代中,某个代价函数虽然向Problem只AddResidualBlock了一次,但调用次数可能不只一次。是多次时,是调用所完代价函数后,再下一轮。正是这原因,CeresScanMatcher2D在执行优化时,在一次迭代,OccupiedSpaceCostFunction2D、TranslationDeltaCostFunctor2D、RotationDeltaCostFunctor2D极可能会先后执行两次。
一、使用Ceres
为使用Ceres求解问题,一般按以下步骤。
- 定义每个参数块。参数块通常为平凡的向量,但是在SLAM里也可以定义成四元数、李代数这种特殊的结构。如果是向量,那么需要为每个参数块分配一个double数组来存储变量的值。
- 定义残差项的计算方式。残差项通常关联若干个参数块,对它们进行一些自定义的计算,然后返回残差值。Ceres对它们求平方和之后,作为目标函数的值。
- 残差项往往也需要定义雅可比的计算方式。在Ceres中,你可以使用它提供的“自动求导”功能,也可以手动指定雅可比的计算过程。如果要使用自动求导,那么残差项需要按照特定的写法书写:残差的计算过程应该是一个带模板的operator()仿函数。
- 把所有的参数块和残差项加入Ceres对象中,调用Solve函数即可。求解之前,我们可以传入一些配置信息,例如迭代次数、终止条件等,也可以使用默认配置。
作为演示代码,这里使用《视觉SLAM十四讲(第二版)》中曲线拟合示例。
struct CURVE_FITTING_COST
{
CURVE_FITTING_COST(double x, double y)
: _x(x)
, _y(y)
{}
template<typename T>
bool operator()(const T* const abc, T* residual) const
{
// y - exp(ax^2 + bx + c)
residual[0] = T(_y) - ceres::exp(abc[0] * T(_x) * T(_x) + abc[1] * T(_x) + abc[2]);
return true;
}CURVE_FITTING_COST必须实现仿函数operator(),注意函数带const修饰符。它将作为此残差项的代价函数。abc是输入参数。residual是输出参数,存储代价函数计算出的残差值。代价函数中,模块参数T的真实类型是ceres::Jet。由于abc、residual是ceres::Jet类型,一个标量要和它算术运算(加、减、乘、除等)时,须先转成ceres::Jet。转化方法是以标量为参数构造一个Jet对象。举个例子,_x是一个double类型变量,它和输入、输出参数作算术运算时,须使用T(_x)。
double _x;
double _y;
};
void test_slam()
{
double ar = 1.0, br = 2.0, cr = 1.0; // real value
double ae = 2.0, be = -1.0, ce = 5.0; // estimate value
int N = 100;
double w_sigma = 1.0;
double inv_sigma = 1.0 / w_sigma;
cv::RNG rng;
std::vector<double> x_data, y_data;
for (int i = 0; i < N; i ++) {
double x = i / 100.0;
x_data.push_back(x);
y_data.push_back(exp(ar * x * x + br * x + cr) + rng.gaussian(w_sigma * w_sigma));
}给定一条满足以下方程的曲线:
其中a、b、c为曲线参数,w_sigma为高斯噪声,满足。现在假设我们有N个关于x、y的观测点,想根据这些数据求出曲线的参数。请注意,在这个问题中,待估计变量是a、b、c,而不是x。以上for循环先根据模型生成x、y的真值,然后在真值中添加高斯分布的噪声。
double abc[3] = {ae, be, ce};步骤1:定义参数块。参数块是平凡向量,需要为每个参数块分配一个double数组来存储变量的值。
ceres::Problem problem;
for (int i = 0; i < N; i ++) {
problem.AddResidualBlock(
new ceres::AutoDiffCostFunction<CURVE_FITTING_COST, 1, 3>(
new CURVE_FITTING_COST(x_data[i], y_data[i])),
nullptr,
abc
);步骤2、3:定义一次迭代中有哪些残差项,以及它们的的计算方式,并加入Problem。在此个应用中,一次迭代包含N个参残项,这N个残差项虽然有着类似的代价函数,但它们的确是不同的残差项。
在AddResidualBlock将残差项添加到目标函数时,由于优化需要梯度,这里有三种选择。1)使用Ceres自动求导(Auto Diff)。2)使用数值求导(Numeric Diff)。3)自行推导解析的导数形式,提供给Ceres。这里使用第一种。自动求导需要指定残差项和参数块的维度。这里的残差是标量,维度为1;参数块(待优化)是a、b、c三个量,维度3。于是在自动求导类AutoDiffCostFunction的模板参数中设定变量维度为1、3。
} ceres::Solver::Options options; options.linear_solver_type = ceres::DENSE_NORMAL_CHOLESKY; options.minimizer_progress_to_stdout = true; ceres::Solver::Summary summary; uint32_t t1 = SDL_GetTicks(); ceres::Solve(options, &problem, &summary);
步骤4:调用ceres::Solve执行优化。
uint32_t t2 = SDL_GetTicks();
std::stringstream ss;
ss << "message: " << summary.message.c_str() << "\n";
ss << "solve time cost = " << (t2 - t1) << " ms. ";
ss << "estimated a, b, c = ";
for (auto a: abc) ss << a << " ";
SDL_Log("%s", ss.str().c_str());
}以下是过程中输出log。
iter cost cost_change |gradient| |step| tr_ratio tr_radius ls_iter iter_time total_time 0 1.597873e+06 0.00e+00 3.52e+06 0.00e+00 0.00e+00 1.00e+04 0 1.42e-03 1.77e-03 1 1.884440e+05 1.41e+06 4.86e+05 9.88e-01 8.82e-01 1.81e+04 1 1.42e-03 3.37e-03 2 1.784821e+04 1.71e+05 6.78e+04 9.89e-01 9.06e-01 3.87e+04 1 1.10e-03 4.59e-03 3 1.099631e+03 1.67e+04 8.58e+03 1.10e+00 9.41e-01 1.16e+05 1 1.03e-03 5.72e-03 4 8.784938e+01 1.01e+03 6.53e+02 1.51e+00 9.67e-01 3.48e+05 1 1.04e-03 6.85e-03 5 5.141230e+01 3.64e+01 2.72e+01 1.13e+00 9.90e-01 1.05e+06 1 1.04e-03 7.99e-03 6 5.096862e+01 4.44e-01 4.27e-01 1.89e-01 9.98e-01 3.14e+06 1 1.04e-03 9.16e-03 7 5.096851e+01 1.10e-04 9.53e-04 2.84e-03 9.99e-01 9.41e+06 1 1.08e-03 1.03e-02 message: Function tolerance reached. |cost_change|/cost: 1.086533e-11 <= 1.000000e-06 solve time cost = 11 ms. estimated a, b, c = 0.890908 2.1719 0.943628
Ceres更多使用实例参考“Ceres入门——Ceres的基本使用方法”。
二、迭代结束条件:FunctionToleranceReached
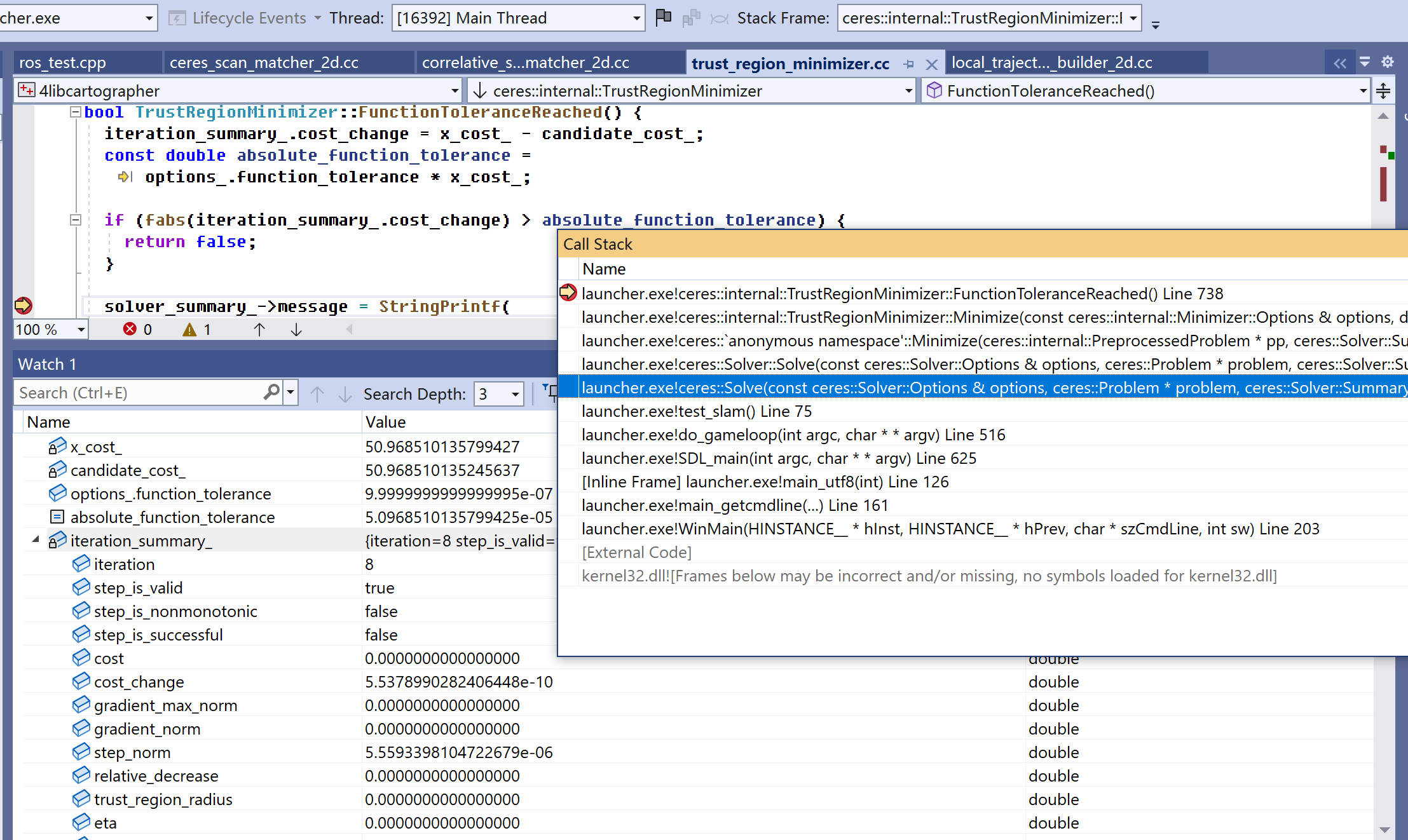
bool TrustRegionMinimizer::FunctionToleranceReached() {
iteration_summary_.cost_change = x_cost_ - candidate_cost_;
const double absolute_function_tolerance =
options_.function_tolerance * x_cost_;
if (fabs(iteration_summary_.cost_change) > absolute_function_tolerance) {
return false;
}- x_cost_。上一轮迭代计算出的不包含solver_summary_->fixed_cost的cost。对照看上面“过程中输出log”和图1,因为fixed_cost是0,x_cost_就是log中第7轮迭代的cost。
- candidate_cost_。此轮迭代计算出的不包含solver_summary_->fixed_cost的cost。
- iteration_summary_.cost_change。此轮迭代的cost变化量。
- options_.function_tolerance。(new_cost - old_cost) < function_tolerance * old_cost。默认值:1e-6。
solver_summary_->message = StringPrintf(
"Function tolerance reached. "
"|cost_change|/cost: %e <= %e",
fabs(iteration_summary_.cost_change) / x_cost_,
options_.function_tolerance);
solver_summary_->termination_type = CONVERGENCE;
if (is_not_silent_) {
VLOG(1) << "Terminating: " << solver_summary_->message;
}
return true;
}
三、log输出到Windows
minimizer_progress_to_stdout为true时,表示要输出log。log的目的地是控制台,具体在win10,输出到Console。但在win10用的Subsystem是Windows,为输出到Windows,须要修改log输出函数。
<ceres>/internal/ceres/callbacks.cc
------
CallbackReturnType LoggingCallback::operator()(
const IterationSummary& summary) {
...
if (log_to_stdout_) {
// std::cout << output << std::endl;
// 改为用SDL_Log。output是log内容。
SDL_Log("%s", output.c_str());
} else {
VLOG(1) << output;
}
return SOLVER_CONTINUE;
}