
代码参考:小程序Basic(aplt.leagor.basic)有一个底盘驱动实例tleagor_base。
底盘硬件规范,最小线速度、角速度等更多信息,参考:硬件规范。
- 底盘子任务进入空闲或被占用,不会卸载子任务所在的*.so。
- 当存在studio的小程序时,如果正运行的底盘子任务是属于源1的小程序A,不要让触发运行源2的小程序A。原因是,当触发源2的小程序A时,会挂起源1的小程序(让进入preempted),这不卸载源1的*.so。由于这个不卸载,会导致在内存留下些些痕迹,像lua环境存在aplt_leagor_khome__cpp表。而新触发源2的小程序,会先去创建aplt_leagor_khome__cpp表,但此时这个表已存在,导致程序崩溃。
- 场景子任务状态是sts_preempted,不能等同有后台正有运行相机任务。场景任可能是主动挂起,之后有后台相机任务运行了,那这时的场景子任务状态是sts_idle。
一、输出规范
1.1 settings.cfg
base_driver = true
根下需存在键“base_driver”,值是bool类型的“true”。
1.2 libroseaplt.so需输出函数:aplt_create_base_slot
void* aplt_create_base_slot();
返回值是个指向aplt::tbase_slot对象的指针。
二、导航
导航是个很广话题,涉及众多算法,具体到底盘驱动,任务可归结为一个。
- 订阅话题:/cmd_vel,消息类型:geometry_msgs::Twist,然后把这速度发向驱动板。
和处理速度相关,底盘驱动须重载数个api。
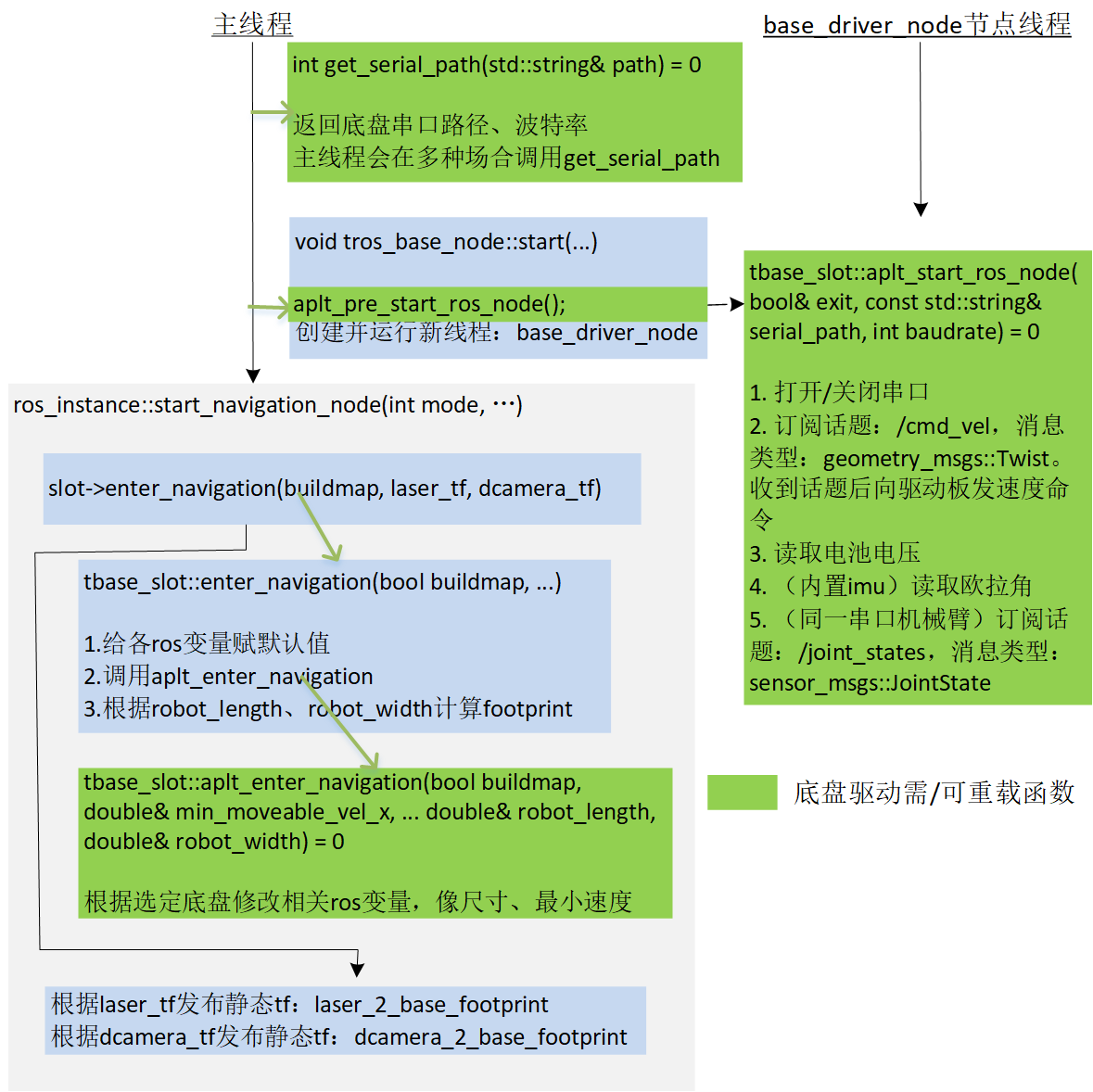
- (主线程)会在多种场合调用get_serial_path,从而得到底盘串口路径和波特率。
- (主线程)一旦系统设置了底盘驱动,会调用tros_base_node::start。start依次做两件事,一是调用aplt_pre_start_node。二是创建并运行线程:base_driver_node,线程函数是底盘驱动须重载的aplt_start_ros_node。为什么没进入导航就要启动节点线程?——为了读电池电压。做到机器人运行着,就要能读电压。。
- (节点线程)aplt_start_ros_node()。这个函数行为非常像ros中已有的底盘节点,所以线程名用了“_node”字样。它一般要做几件事。1)打开/关闭串口;2)订阅话题:/cmd_vel,消息类型:geometry_msgs::Twist。收到话题后向驱动板发速度命令;3)读取电池电压。4)如果是内置imu,要读取实时欧拉角。
- (主线程)要开始导航了,会调用ros_instance::start_navigation_node,参数buildmap表示此次是否是建图。laser_tf、dcamera_tf是两个类型是2D位姿的输出参数。必须填写laser_tf,用于指示激光雷达到base_footprint的tf。如果有深度相机,还需要填写dcamera_tf,指示深度相机到base_footprint的tf。
- (start_navigation_node)调用驱动enter_navigation方法。这可分为三个操作。1)给各ros底盘变量赋默认值。2)调用aplt_enter_navigation,通过重载这方法,驱动改掉认为不符要求的默认值。3)根据robot_legnth、robot_width计算footprint。
- (start_navigation_node)创建数个坐标系,并发布静态tf。坐标系中有以机器人中心为原点的base_footprint,以雷达中心为原点的laser,以深度相机中心为原点的dcamera。之前得到的laser_tf、dcamera_tf用于发布laser、dcamera的静态tf。
aplt_start_ros_node是底盘节点的线程函数,带三个参数。
virtual void aplt_start_ros_node(bool& exit, const std::string& serial_path, int baudrate) = 0;
- exit[IN]。表示是否要退出节点线程。平时false,一旦launcher希望退出线程了,会置为true。一旦检测到true,start_navigation需立即退出。
- serial_path[IN]。可用于作为open参数的串口路径。在android,类似“/dev/ttyUSB0”。
- baudrate[IN]。串口通信时要使用的波特率。示例:115200。
机械臂节点和雷达节点也有这么个线程函数,三个参数意义和这里的一样。
三、footprint、雷达和底盘中心相对位置
virtual void aplt_enter_navigation(bool buildmap, ros::tbase_cfg& base_cfg,
double& max_mode_vel_x, double& max_mode_vel_theta) = 0;这个footprint就是ros中的footprint(足迹)。在ros,是用数个顶点表示footprint。在这里只让开发者给出机器人长度、宽度,rose会由它们算出ros需要的顶点。在驱动代码,让在aplt_enter_navigation中的base_cfg.robot_width、base_cfg.robot_height返回这两个值。
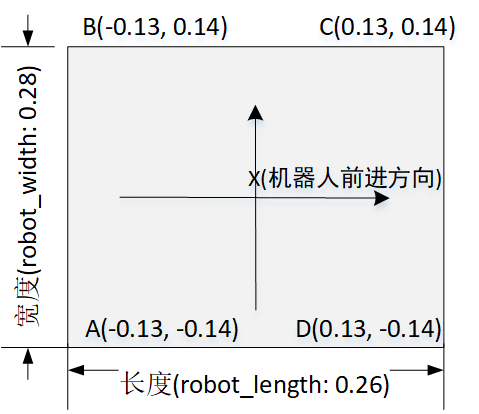
图2显示了机器人长度(robot_length)、宽度(robot_width)含义,单位都是米。开发者定义robot_length=0.26、robot_width=0.28,经由这值会算出“[[-0.13, -0.14], [-0.13, 0.14], [0.13, 0.14], [0.13, -0.14]]”,把它做为ros的footprint。
在ros,至少会存在两个坐标系,以机器人底盘中心为原点的base_footprint坐标系,以雷达中心为原点的laser坐标系。可能的话,还会有以深度相机中心为原点的dcamera坐标系。enter_navigation的输出参数laser_tf返回这个laser到base_footprint的tf,dcamera_tf返回这个dcamera到base_footprint的tf。对tf值类型tpose2d,x、y、yaw分别是tf中的position.x、position.y和旋转中的yaw。底盘驱动则是在aplt_enter_navigation时填写这两个tf。
有什么方法可较快验证laser_tf?——在机器人前面横一块障碍物,在rviz,测量base_footprint到障碍物距离是真实世界距离。如果不方便测dcamera到base_footprint的tf,依旧是横一块障碍物,rviz上显示的障碍物,能够让相机、雷达近乎接近的那个x,就是要得到的pose2d.x。
四、imu
底盘驱动要用imu读取实时欧拉角。
virtual bool has_magnetometer() const { return false; }
virtual bool start_calib_magnetometer() { return false; }
virtual bool stop_calib_magnetometer() { return false; }
virtual bool has_angular_velocity() const { return false; }
virtual bool use_external_imu() const { return false; }
virtual void open_external_imu(const std::string& serial_path, int baudrate, bool use_magnetometer) {}
texternal_imu* external_imu() const { return external_imu_; }
virtual void close_external_imu();
virtual bool imu_can_read() const = 0;按imu是否使用独立串口,分为内置imu和外置imu。驱动板自带、从驱动板串口读的称内置,用独立串口接入的称为外置。use_external_imu()返回值指示用的是内置(false)还是外置(true)。
有的imu支持输出融和磁力计后的欧拉角,如果这底盘能融和磁力计,让has_magnetometer()返回true。但是,对融和磁力计的,一般需要个称为校准的操作,start_calib_magnetometer、stop_calib_magnetometer对应开始、结束校准。
如果用外置imu,launcher接下会调用open_external_imu(...)打开这个独立串口,参数分别是串口路径、波特率,以及欧拉角是否要融合磁力计。打开后的外置imu存储在tbase_slot成员变量external_imu_。当要销毁时,launcher会调用close_external_imu()。
对不少imu设备,打开后,并不意味着立即可以读欧拉角。像IM600,得先发SET_CONFIG(0x12)等命令。确定欧拉角可读了,让imu_can_read()返回true。
namespace aplt {
class tvaluex
{
double battery_level; // voltage
double euler[3]; // radian
double angular_vel[3]; // radian/s
};
tvaluex valuex;
}读出的实时欧拉角存储在aplt::tvaluex::euler[3],0、1、2分别是roll、pitch、yaw。对这三种,目前只在用yaw。
如果底盘支持输出实时角速度,那让has_angular_velocity()返回值true,并把3个角度速填写在aplt::tvaluex::angular_vel[3]。0、1、2分别是x、y、z三个方向。本计划把这三个用在cartographer的imu角速度,目前这方面还在测试,也就不会生效。现在就让has_angular_velocity()返回false。
五:电池电压
不论实时电压,还是三常量电压,用double类型表示,单位伏特。
5.1 实时电压
底盘驱动往往在非主线程读出电压,意味着须要和主线程同步。主线程可能会非常频繁地使用电池电压,如果每次读取都要同步,有点太耗资源。采取方案:底盘驱动在非主线程设置时要带同步,然后主线程隔5秒,把这个非主线程读到的电压赋值给主线程可自由访问的电压battery_level。
- (主线程)要开始读电压了,调用nposm_NMTHREAD_battery_level()。一次底盘驱动运行期间,只会调用一次,目的是把NMTHREAD_battery_level_置为false。
- (非主线程/主线程)[底盘驱动]读到电压了,调用set_NMTHREAD_battery_level(double level)。
- (主线程)调用flip_battery_level,把非主线程得到的电压设置到battery_level。因为电压不会变得非常快,5秒才调一次。
- (主线程)可不必同步地使用battery_level。
底盘驱动要写当前电压时,不论是在非主线程 、还是主线程读到电压,都用set_NMTHREAD_battery_level()去修改。在非主线程要和主线程读同步,用这函数好理解,为什么主线程读到的,不直接改到battery_level,而要用它?——set_NMTHREAD_battery_level除同步外,还有个操作是更新last_NMTHREAD_battery_level_ticks_,一个用于指示底盘驱动读到电压最后时刻的变量。launcher要通过它,判断是否持续10秒没读到电压了。
底盘驱动要读当前电压时,如果是主线程,直接读battery_level,不必加锁。在非主线程,那要把主线程读到的battery_level传递过去。或调用自带加锁的last_NMTHREAD_battery_level_ticks()。
持续10秒没从底盘驱动读到新电压,即底盘驱动一直不调用set_NMTHREAD_battery_level,会执行两个操作。
- 语音报警:已较长时间没收到电池电压,检查下底盘串口连接。
- 正处在Home界面时,显示“重启底盘驱动”按钮。
对当前电压不会变的,像外接电压供电设备,为不让launcher播放10秒无新电压报警,需要定时调用set_NMTHREAD_battery_level()。
5.2 tbattery_info_C中的三常量电压
struct tbattery_info_C
{
double max;
double charge;
double cutoff;
};- max。最大电压。示例:12.6。电池能达到的最大电压。
- charge。充电电压。示例:10.5。一旦电压小于该值,会用语音报警:电池电压10.5伏,请充电。除语音,就不做其它事了。因而自动回充需要在没到充电电压时,就去回充,避免电压掉到充电电压下。
- cutoff。截止电压。示例:10.0。设想是一旦电压小于该值,关设备。但目前没有实现关设备操作。
底盘驱动通过重载aplt_get_battery_info,告知launcher这三个电压。驱动运行期间,这3个电压是恒定值。
六、和机械臂共用一个串口
机器人如何安装机械臂,这里存在两种方法。一种是底盘和机械臂共用一个串口,这可能是底盘和机械臂就同一个产家,或虽然不同产家,但底盘知道控制机械臂协议。一种是机械臂单独安装,双方有着独立串口。对编写驱动来说,第二种情况就是各写各的。以下说第一种会遇到的额外问题。
存在机械臂时,机器人须要底盘和机械臂这两个独立驱动。因为串口是同一个,它们的串口node线程运行的其实是同样逻辑,只是函数名不同罢了,底盘驱动叫tbase_slot::start_navigation,机械臂驱动叫::start_moveit。可以肯定,机械臂、底盘同时要操作时,只能运行当中一个node线程。这里就存在个问题,运行哪一个?——是先启动机械臂,还是先启动底盘导航,这是没法确定的。launcher用着以下逻辑启动底盘、机械臂。
void tros_instance::start_base_or_moveit_serial(bool base, bool buildmap)
{
tdrivers::tvars vars = drivers_.curvars(true);
bool is_same = vars.base.node == vars.moveit.node;
tdrivers::tserialp* seiralp = nullptr;
if (base) {
if (!is_same || !moveit_driver_.started()) {
base_driver_.start_navigation(buildmap, vars.base.node, vars.base.baudrate);
} else {
SDL_Log("base and moveit use same serial, and moveit has started, so base run fake");
base_driver_.set_thread(buildmap, moveit_driver_.get_thread());
}
} else {
if (!is_same || !base_driver_.started()) {
moveit_driver_.start_moveit(vars.moveit.node, vars.moveit.baudrate);
} else {
SDL_Log("base and moveit use same serial, and base has started, so moveit run fake");
moveit_driver_.set_thread(base_driver_.get_thread());
}
}
}如果底盘、机械臂是两个串口(is_same=false),那启动各自节点线程。
如果是同一个串口,谁先启动就运行谁的节点线程,后启动那个采用方法是增加该节点线程的引用计数。因为用了引用计数,即使两个都在操作,那运行的只一个节点线程。
void tbase_driver::set_thread(bool buildmap, net::tshared_worker& thread)
{
VALIDATE_IN_MAIN_THREAD();
VALIDATE(slot != nullptr, null_str);
VALIDATE(thread_.get() == nullptr, null_str);
VALIDATE(thread.get() != nullptr, null_str);
slot->pre_start_navigation(buildmap);
thread_ = thread;
}以上是set_thread代码,依旧会调用底盘驱动的pre_start_navigation方法,但不再创建节点线程,只是增加个已有节点线程的引用计数。
和机械臂共用一个串口有关,探讨一个问题:为什么底盘驱动要新建一个线程去运行start_navigation。想想看,打开串口,接收/cmd_vel话题,向底盘发速度命令,这些都不是费时操作。如果能放在主线程,那读出的电压,欧拉角,因为写操作是在主线程,和主线程其它模块读它们,天然没有了同步读写问题。
- 在执行机械臂操作时,可能会是个阻塞式任务,像tros_instance::do_pickplace()。在这过程中,要操作机械臂了,moveit模块会通过非主线程发出/joint_states话题。可若是把接收“/joint_states”话题放在主线程,此时主线程还在阻塞中,导致这些/joint_states没法变成命令发到机械臂。当然,可以修改moveit模块,让要操作机械臂时,不再通过/joint_states话题机制,而是直接把sensor_msgs::JointState发向串口。这理论上可以用到,可这需要修改太多moveit代码。
- 既然机械臂节点需要新线程,机械臂极可能是和底盘同用一个串口,底盘节点也只能用新建线程。
七、不可移动模式
一些机器人不会移动,或某些时候不必移动,像台灯机器人、下棋机器人。在这种模式下主要是两个函数。
void slice();
运行在主线程。时间片函数。过程中,它会不断被调用。
void camera_work_frame(const surface& surf, const cv::Mat& argb);
运行在相机线程(BaseCameraThread)。相机接收到一图像后,便会调用camera_work_frame。参数surf和argb是该图像的两种表示法。argb来自“tsurface_2_mat_lock lock(surf)”,方便底盘驱动以它为参数执行opencv相关操作。
在设置模式时,参数use_camera是true,才会调用camera_work_frame。
底盘驱动怎么把结果交给其它单任务?——可以把底盘驱动和单任务放在同一个小程序,这样底盘驱动一加载,小程序动态库部分就被加载了。后面有单任务运行,是同动态库内代码,既然同一个动态库,相互便可自由使用相关变量。
如果不方便把单任务和底盘驱动放在同一个小程序,像不是同一个产家,可通过环境变量。底盘驱动检测到哪事件了,设置某个环境变量。那边单任务发现这变量变了,执行任务,结束后把这变量复位回去。