
一、[未解决]pose_graph_2d.cc中抛出异常
执行transform::operator*(...)时,参数lhs值是0xFFFFFFFF,抛出内存访问异常。这异常可能一开始就出现,也可能晃动几次激光雷达后出现。
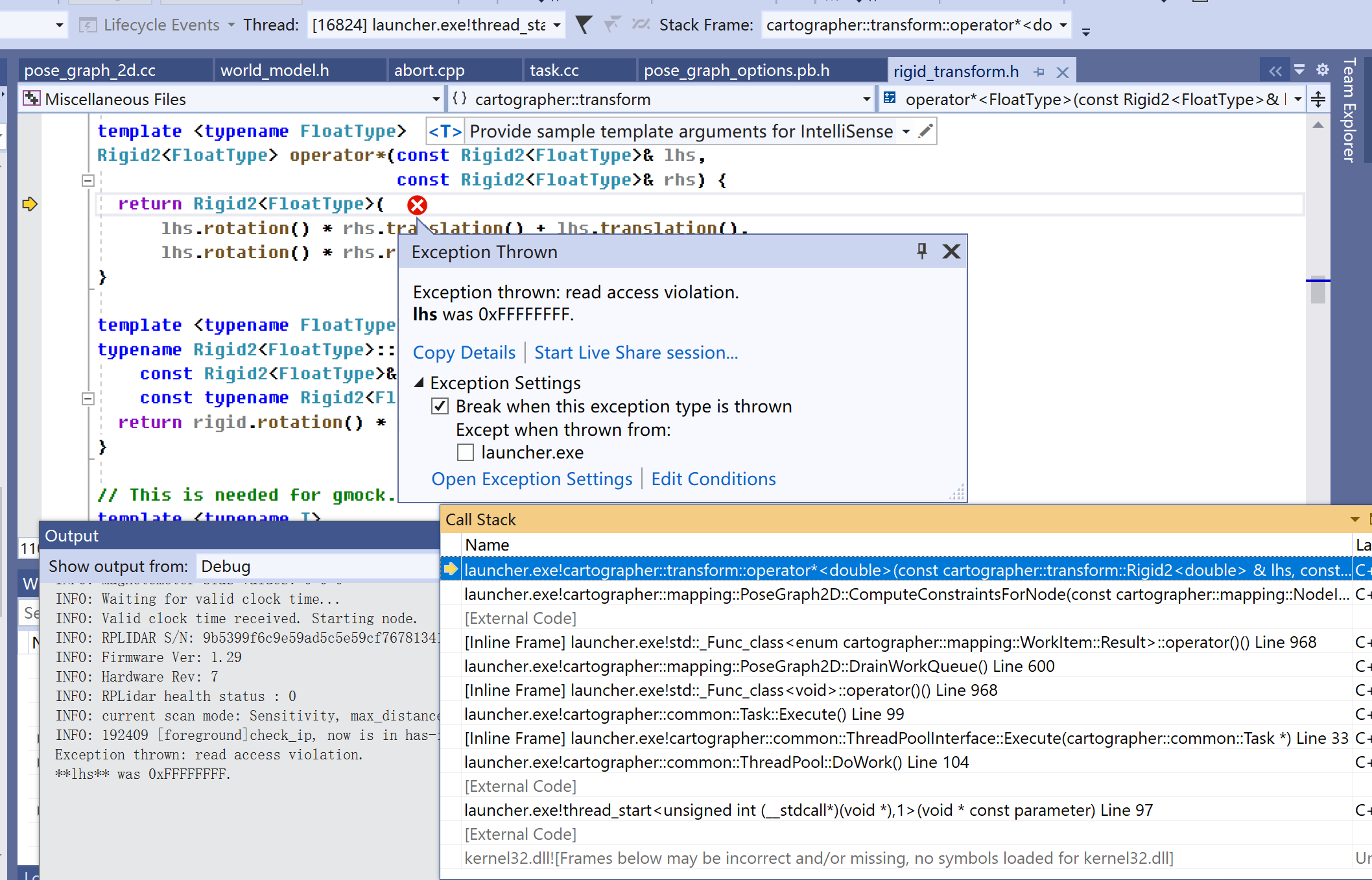
查找是谁调用transform::operator*(...)导致导常,查下有两处:PoseGraph2D::InitializeGlobalSubmapPoses、PoseGraph2D::ComputeConstraintsForNode,它们都可能抛出异常。
<cartographer>/mapping/internal/2d/pose_graph_2d.cc
------
std::vector<SubmapId> PoseGraph2D::InitializeGlobalSubmapPoses(
const int trajectory_id, const common::Time time,
const std::vector<std::shared_ptr<const Submap2D>>& insertion_submaps) {
...
if (data_.submap_data.at(last_submap_id).submap ==
insertion_submaps.front()) {
// In this case, 'last_submap_id' is the ID of
// 'insertions_submaps.front()' and 'insertions_submaps.back()' is new.
// 原先代码++
const auto& first_submap_pose = submap_data.at(last_submap_id).global_pose;
optimization_problem_->AddSubmap(
trajectory_id,
first_submap_pose *
constraints::ComputeSubmapPose(*insertion_submaps[0]).inverse() *
constraints::ComputeSubmapPose(*insertion_submaps[1]));
// ++原先代码
// modify...
// 如果改为“const transform::Rigid2d& first_submap_pose =”,即first_submap_pose是引用,也会抛出异常。
const transform::Rigid2d first_submap_pose = submap_data.at(last_submap_id).global_pose;
const transform::Rigid2d global_submap_pose = first_submap_pose *
constraints::ComputeSubmapPose(*insertion_submaps[0]).inverse() *
constraints::ComputeSubmapPose(*insertion_submaps[1]);
optimization_problem_->AddSubmap(
trajectory_id,
global_submap_pose);
// ...modify
return {last_submap_id,
SubmapId{trajectory_id, last_submap_id.submap_index + 1}};
}
...
}
WorkItem::Result PoseGraph2D::ComputeConstraintsForNode(
const NodeId& node_id,
std::vector<std::shared_ptr<const Submap2D>> insertion_submaps,
const bool newly_finished_submap) {
...
// 原先代码++
const transform::Rigid2d global_pose_2d =
optimization_problem_->submap_data().at(matching_id).global_pose *
constraints::ComputeSubmapPose(*insertion_submaps.front()).inverse() *
local_pose_2d;
// ++原先代码
// modify...
// 如果改为“const transform::Rigid2d& global_pose =”,即global_pose是引用,也会抛出异常。
const transform::Rigid2d global_pose =
optimization_problem_->submap_data().at(matching_id).global_pose;
const transform::Rigid2d global_pose_2d =
global_pose *
constraints::ComputeSubmapPose(*insertion_submaps.front()).inverse() *
local_pose_2d;
// ...modify
...
}总的来说,pose_graph_2d.cc要从submap_data、optimization_problem_->submap_data()取出位姿,以便计算其它位姿,计算时导致异常。
到现在未找到原因。但发现一个现象,要是从submap_data、optimization_problem_->submap_data()取出位姿后先存到一个本地变量,用这本地变量进行后绪计算,好像就不抛出异常了。由于未找到原因,这种方法不确定是否能解决问题。
二、[未解决](grid_2d.cpp)Grid2D::GrowLimits中的“MapLimits new_limits(...)”抛出异常
在Grid2D::GrowLimits()执行“MapLimits new_limits(...)”时,抛出内存访问异常。这异常可能一启动cartographer就出现,也可能运行一段时间后出现。
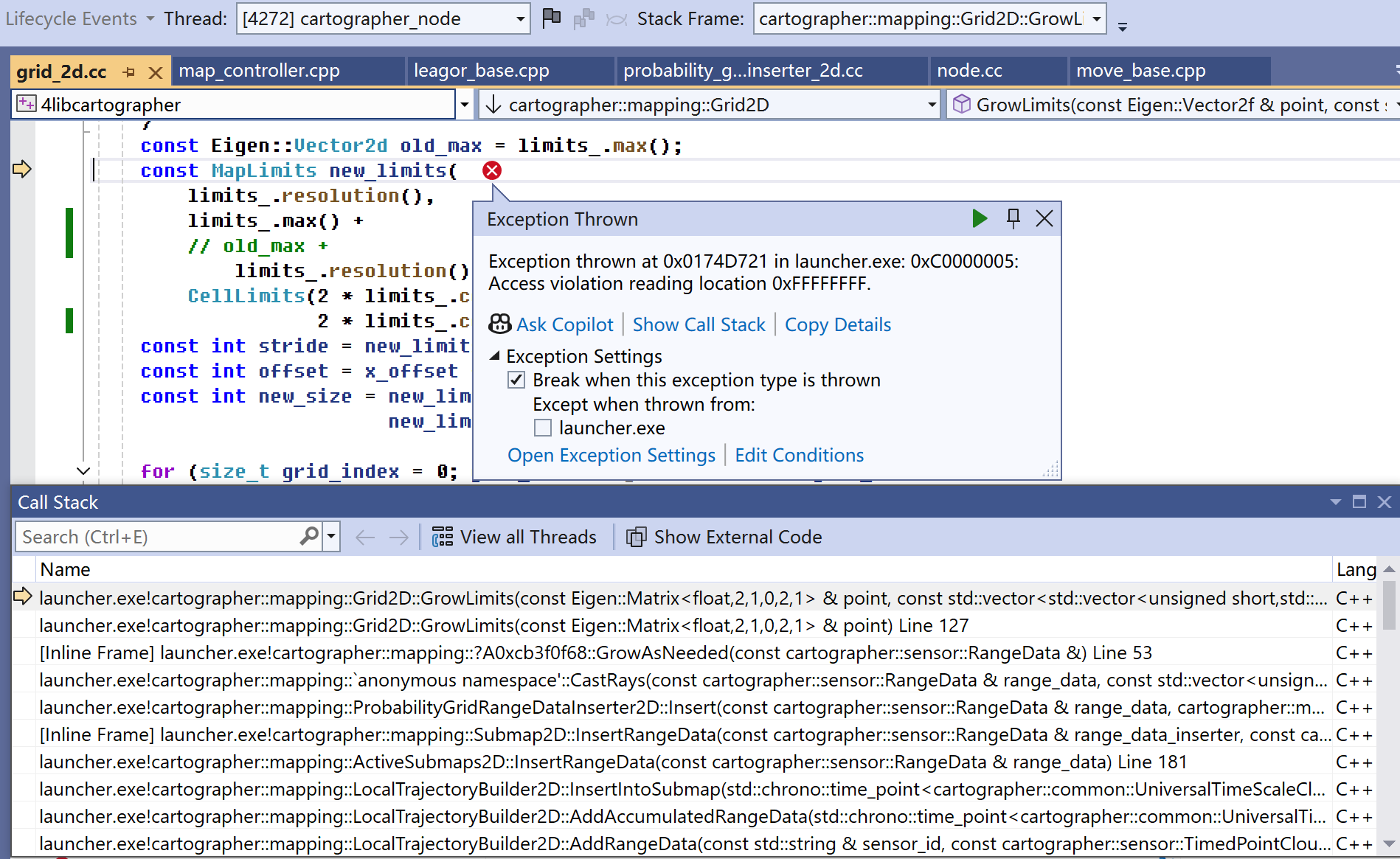
修改方法是把参数“limits_.max()”单独生成一变量old_max,然后把这变量传给“MapLimits new_limits”。
<cartographer>/cartographer/mapping\2d\grid_2d.cc
------
void Grid2D::GrowLimits(const Eigen::Vector2f& point, ...)
{
...
// const Eigen::Vector2d& old_max = limits_.max();如果定义old_max是引用,也会抛出这异常
const Eigen::Vector2d old_max = limits_.max();
const MapLimits new_limits(
limits_.resolution(),
// limits_.max() +
old_max +
limits_.resolution() * Eigen::Vector2d(y_offset, x_offset),
CellLimits(2 * limits_.cell_limits().num_x_cells,
2 * limits_.cell_limits().num_y_cells));
...
}如果新增变量old_max不是值,而是引用,也会抛出这异常。
这么改后,看不出和原来代码有啥不同。由于未找到原因,这种方法不确定是否能解决问题。
Microsoft Visual Studio Professional 2022 (64-bit) - Current Version 17.10.1
这问题不是一开始就有。cartographer至少用了2年,2024年6月,把Visual Studio升级到17.10.1后,突然就冒出来。
三、PoseGraph2D::WaitForAllComputations()出现阻塞
详细内容见“Global SLAM”中“PoseGraph2D::WaitForAllComputations()出现阻塞”。
四、先销毁cartographer_occupancy_grid_node,再销毁cartographer_node
cartographer包需要运行两个节点,一个是cartographer_node,一个是cartographer_occupancy_grid_node。停止时,一定要先销毁cartographer_occupancy_grid_node,确保它已销毁后,再停掉cartographer_node的cbqueue.callAvailable()。当然,做这操作,基本就是销毁cartographer_node。否则会造成销毁cartographer_node时,会因为在ServiceManager::unadvertiseService死等shutting_down_mutex_,导致程序锁死。
让看下先销毁cartographer_node,会发生什么事。
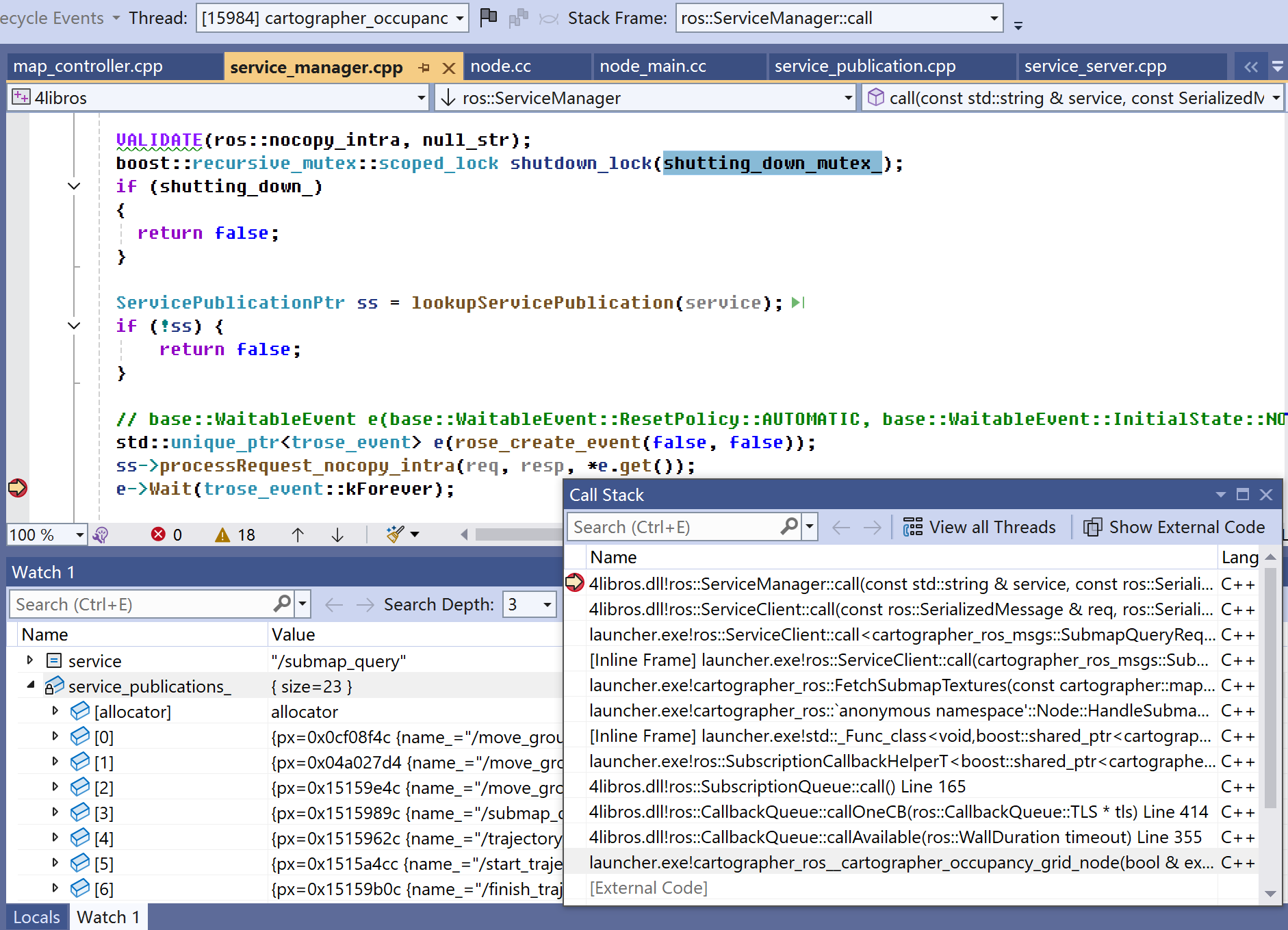
对cartographer_occupancy_grid_node节点,它的功能是画栅格图,画栅格图是通过不断(定时)向cartographer_node的“/submap_query”服务发请求,让获得当前子图集。图1显示了ServiceManager::call(),它处理如何发出请求。首先要申请掉shutting_down_mutex_,在发出“/submap_query”请求后,会死等“e”有信号。“e”啥时有信号?——cartographer_node节点在处理了这个“/submap_query”请求后。可此时cartographer_node已处于正在销毁,它不会再调用cbqueue.callAvailable(),于是cartographer_occupancy_grid_node只能继续等在这里。它造成的另一个恶果:会一直占用shutting_down_mutex_。
再看此时cartographer_node,正处在销毁中,过程中会析构cartographer_ros::Node对象。
<cartographer_ros>/cartographer_ros/cartographer_ros/node.h
------
namespace cartographer_ros {
class Node {
std::vector<::ros::ServiceServer> service_servers_;
};
}成员变量service_servers_存储着cartographer_node提供的服务,当中就有“/submap_query”。在析构某个ServiceServer时,会先调用unadvertiseService注销服务。
<libros>/ros_comm/roscpp/src/libros/service_manager.cpp
------
bool ServiceManager::unadvertiseService(const string &serv_name)
{
boost::recursive_mutex::scoped_lock shutdown_lock(shutting_down_mutex_);
...
}可以看到,unadvertiseService首先要申请shutting_down_mutex_,可这锁此时等被图1的ServiceManager::call()占用着,结果造成程序死锁在unadvertiseService。
解决办法是在销毁cartographer_node节点前,确保没有节点会向它发服务请求,像“/submap_query”。换句话说,先销毁cartographer_occupancy_grid_node,再销毁cartographer_node。
五、cartographer开始建图后,停在断点,继续运行后建出的图像会漂移
cartographer开始建图后,设置断点,停在断点一点时间,继续运行后,建出的图像会漂移,是什么原因?
六、是否能优化Node::HandleLaserScanMessage的执行时间
分析Node::HandleLaserScanMessage中的各任务,以及它们的执行时间。在android下,找到如何缩短时间的方法。
七、调试导航
7.1 验证cartographer发出的点云和ObstacleLayer::pointCloud2Callback收到的点云是否一致
- 让map-->odom tf发出一个不是0的固定变换。方法:修改MapBuilderBridge::GetLocalTrajectoryData(),让local_to_map返回一个非0位姿。
- 在Node::PublishLocalTrajectoryData,把发出的点云数据sensor_msgs::PointCloud2.data存成文件,须要的话map、odom各一个。
- 在ObstacleLayer::pointCloud2Callback,把收到的点云数据sensor_msgs::PointCloud2.data存成文件。
- 比较接收、发送端两处的sensor_msgs::PointCloud2.data文件,看是否一致。
八、ceres
目前用的ceres是2021-6-28从github下载的版本。曾在2023-6-23从github下载ceres,编译后发现几个问题。
8.1 在windows下用CMake编译2023-6-23版本ceres
-- Failed to find glog - Could not find glog library, set GLOG_LIBRARY to full path to libglog. CMake Error at CMakeLists.txt:448 (message): Can't find Google Log (glog). Please set either: glog_DIR (newer CMake built versions of glog) or GLOG_INCLUDE_DIR & GLOG_LIBRARY or enable MINIGLOG option to use minimal glog implementation.
如果报以上错,参考“cmake报错CMake Error at CMakeLists.txt: Can‘t find Google Log (glog). Please set either ... 的解决方法”。方法是修改CMakeLists.txt,让不用glog,改为用MiniGlog。
<ceres-solver>/CMakeLists.txt
------
# MiniGLog.
set(MINIGLOG 1) # 增加这条语句
if (MINIGLOG)
message("-- Compiling minimal glog substitute into Ceres.")
...
8.2 2023-6-23版本已缺少cartographer需要的一些类型
<cartographer>/cartographer/mapping/internal/optimization/ceres_pose.cc
------
CeresPose::CeresPose(
const transform::Rigid3d& pose,
std::unique_ptr<ceres::LocalParameterization> translation_parametrization,
std::unique_ptr<ceres::LocalParameterization> rotation_parametrization,
ceres::Problem* problem)
: data_(std::make_shared<CeresPose::Data>(FromPose(pose))) {
problem->AddParameterBlock(data_->translation.data(), 3,
translation_parametrization.release());
problem->AddParameterBlock(data_->rotation.data(), 4,
rotation_parametrization.release());
}2023-6-23版本中没有定义上面出现的ceres::LocalParameterization。
8.3 2023-6-23需要C++17
namespace ceres::internal {
}类似以上语法须要C++17,这语法到处在用。除这外,还有其它需要C++17的语法。
目前launcher+kdesktop的是C++14。编译2023-6-23版本似乎并不需要abseil-cpp。因为存在5.2这问题,先不升级ceres。