
- 单一、有序场景。指这么种场景:只有一个传感器,每次采样有一定间隔,且采集新点云帧第一个点的时间一定比旧点云最后一个点的时间晚。
- 到TimedPointCloudOriginData,表示点云中的点用的是tracking_frame坐标系下的3d直角坐标。在rose_ros,tracking_frame="base_footrprint",即点云中的点格式是base_footprint坐标系下的3d直角坐标。TimedPointCloudOriginData.origins[0]则是laser-->base_footprint的tf中平移部分,像(0, 0, 0.098)。
通过定阅“scan”话题,cartogeapher收到sensor_msgs::LaserScan消息,当中含有点云数据。这里叙述如何处理点云,直到点云数据放在了一个TimedPointCloudOriginData类型变量。示例用的2D SLAM传感器是思岚RPLIDAR A1M8,每次点云采集时有720个点。文中的四张截图,是处理同一次点云时截的,可相互对照。
先给出小结,后详述每个过程。
| 过程 | 数据结构 | 点云数 | 点坐标 | 点时间戳 |
| 传感器采集点云 | sensor_msgs::LaserScan | 传感器采集到的点数,像720 | 极坐标,(R, Theta) | 一个采集第一个点时刻的绝对时间。一个两点采集间隔,相邻点采集间隔是同一个值 |
| 极坐标到3D直角坐标 | sensor::PointCloudWithIntensities | 去除inf,像622 | 3D直角坐标。2D点云时,z总是0,x、y满足sqrt(x*x + y*y)=R,tan(y/x)=Theta | 一个采集最后一个点时刻的绝对时间,即零时刻。每个点都有time字段,单位秒。最后一个点的time是0,序号越小,time是越小的负数 |
| 分段 | sensor::TimedPointCloud | num_subdivisions_per_laser_scan == 1时,同上 | 同上 | 同上 |
| 坐标系变换 | sensor::TimedPointCloudData | 同上 | 同上 | 同上 |
| 融合多传感器点云 | sensor::TimedPointCloudOriginData | 同上 | 除上面3D直角坐标外,加上个原点索引origin_index。对单一、有序场景,既然origins.size()总是1,那它只能是0 | 同上 |
一、[sensor_msgs::LaserScan](std::vector<float>)ranges
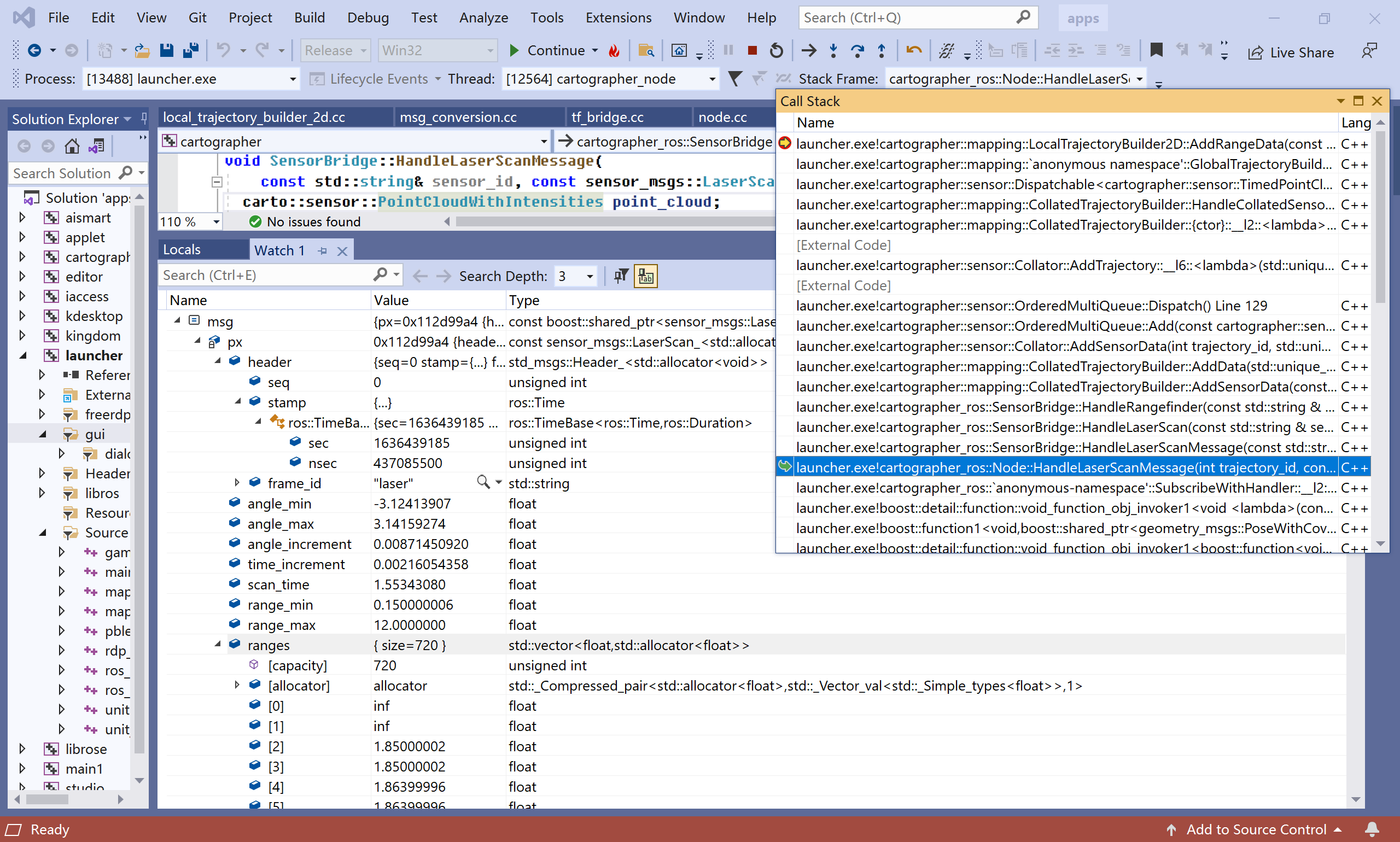
Node::HandleLaserScanMessage()是“scan”话题关联的处理回调,它收到的消息类型是sensor_msgs::LaserScan,点云存放在ranges字段,数据结构是std::vector<float>。每个点的数值是障碍物和laser坐标系原点之间距离R,单位米。如果该点上没障碍物,值是inf(C++数值std::numeric_limits<float>::infinity()),正如图1中的ranges[0]、ranges[1]。
通过angle_increment字段,可以算出每个点的夹角Theta,因而LaserScan是用极坐标存储点云。
time_increment是相邻点之间的到达时间间隔。720个点意味着有719个间隔,这些间隔是同一个值。LaserScan.header.stamp是个绝对时间,它表示第一个点采集时刻,根据时间间隔,便可算出其它各点的采集时间。但实际使用时,往往用一个变量存储最后一个点的绝对时间,其它点存储的是离该点的相对时间。
二、[sensor::PointCloudWithIntensities](std::vector<TimedRangefinderPoint>)points
struct TimedRangefinderPoint {
// 该点的3D坐标。2D点云时,z总是0,x、y满足sqrt(x*x + y*y)=R,tan(y/x)=Theta。
Eigen::Vector3f position;
// 该点的时间戳,单位秒。
float time;
};
using TimedPointCloud = std::vector<TimedRangefinderPoint>;
struct PointCloudWithIntensities {
TimedPointCloud points;
std::vector<float> intensities;
};
在SensorBridge::HandleLaserScanMessage(...),会调用ToPointCloudWithIntensities(*msg),把sensor_msgs::LaserScan转成PointCloudWithIntensities类型。转换后,点云存放在points字段,数据结构是std::vector<TimedRangefinderPoint>,该std::vector有一个别名:TimedPointCloud。
template
std::tuple<PointCloudWithIntensities, ::cartographer::common::Time>
LaserScanToPointCloudWithIntensities(const LaserMessageType& msg) {
CHECK_GE(msg.range_min, 0.f);
CHECK_GE(msg.range_max, msg.range_min);
if (msg.angle_increment > 0.f) {
CHECK_GT(msg.angle_max, msg.angle_min);
} else {
CHECK_GT(msg.angle_min, msg.angle_max);
}
PointCloudWithIntensities point_cloud;
// 留住的点中,初始角度是msg.angle_min。
float angle = msg.angle_min;
for (size_t i = 0; i < msg.ranges.size(); ++i) {
const auto& echoes = msg.ranges[i];
if (HasEcho(echoes)) {
// echoes就是一个float值,bool HasEcho(float) { return true; },这个if总是返回true。
const float first_echo = GetFirstEcho(echoes);
// first_echo就是msg.ranges[i]。float GetFirstEcho(float range) { return range; }
if (msg.range_min <= first_echo && first_echo <= msg.range_max) {
// 留住r在[msg.range_min, msg.range_max]的点。要没意外,就是剔除那些inf点。
// angle是该点角度,以该角度作为yaw,生成一个旋转向量rotation。
const Eigen::AngleAxisf rotation(angle, Eigen::Vector3f::UnitZ());
// 极坐标转成3D向量。值是rotation * (first_echo, 0, 0)。该向量z
const cartographer::sensor::TimedRangefinderPoint point{
rotation * (first_echo * Eigen::Vector3f::UnitX()),
i * msg.time_increment};
point_cloud.points.push_back(point);
if (msg.intensities.size() > 0) {
CHECK_EQ(msg.intensities.size(), msg.ranges.size());
const auto& echo_intensities = msg.intensities[i];
CHECK(HasEcho(echo_intensities));
point_cloud.intensities.push_back(GetFirstEcho(echo_intensities));
} else {
point_cloud.intensities.push_back(0.f);
}
}
}
angle += msg.angle_increment;
}
::cartographer::common::Time timestamp = FromRos(msg.header.stamp);
if (!point_cloud.points.empty()) {
const double duration = point_cloud.points.back().time;
timestamp += cartographer::common::FromSeconds(duration);
for (auto& point : point_cloud.points) {
point.time -= duration;
}
}
return std::make_tuple(point_cloud, timestamp);
}
LaserScanToPointCloudWithIntensities执行的转换要解决两个问题:一是哪些点会留在points,二是点是以什么值存放在points。
哪些点会留在points
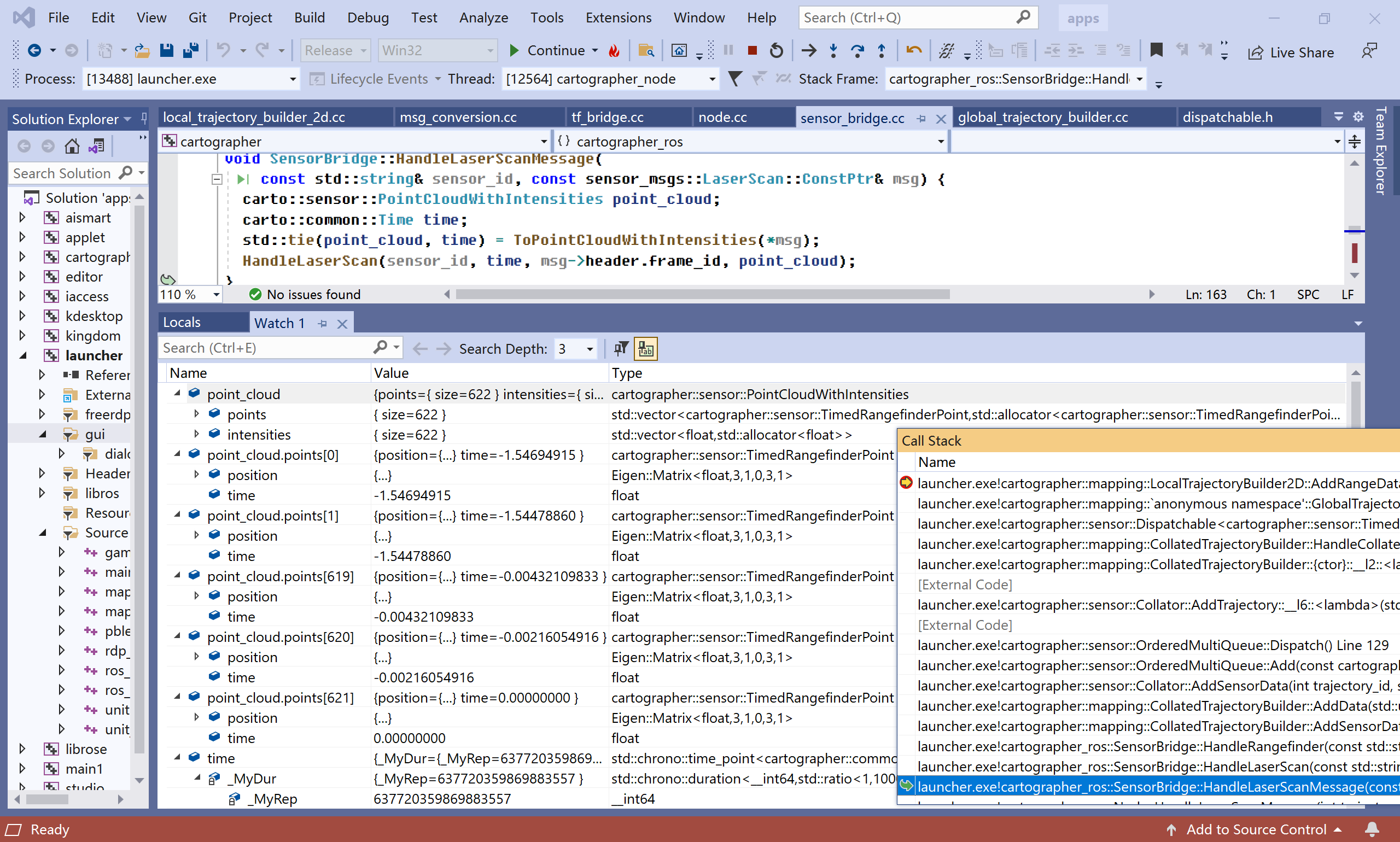
ranges[i]值需要落在范围[msg.range_min, msg.range_max],丢掉的一般有两种情况:1)值是inf的点。2)LaserScan.range_min、range_max设置不正确导致丢掉的点。对应图2,原来720点减少到622,少掉的都因为值是inf。
点是以什么值存放在points
points的每个单元包括两个字段:position和time。
- position是个3D向量。2D点云时,z总是0,x、y满足sqrt(x*x + y*y)=R,tan(y/x) = Threta,换句话说,极坐标变换为在xoy平面的直角坐标。
- time。以秒为单元的相对时间,但相对的基点由#1变成了最后一个#N。#N时的time固定是0,点索引变小时,time值是渐小的负数。
| 点索引 | 极坐标(R, Theta) | 到达时间(秒) | position(x, y, z) | time |
| 2/719 | 1.85000, -3.10671 | 0.00432 | -1.84887, -0.06451, 0 | -1.54694915 |
| 3/719 | 1.85000, -3.09799 | 0.00648 | -1.84824, -0.08062, 0 | -1.54478860 |
| 4/719 | 1.86399, -3.08928 | 0.00864 | -1.86145, -0.09746, 0 | -1.54262805 |
| ... | 0、1、719的R是inf | |||
| 716/719 | 0.49500, 3.11544 | 1.54694 | -0.49483, 0.01294, 0 | -0.00432109833 |
| 717/719 | 0.50199, 3.12415 | 1.54910 | -0.50192, 0.00875, 0 | -0.00216054916 |
| 718/719 | 0.53200, 3.13286 | 1.55127 | -0.53197, 0.00464, 0 | 0 |
timestamp是个绝对时间,语义是点云中最后那个点的采集时刻。值是消息头的时间戳(msg.header.stamp,点云中第一个点的采集时刻)加上#N相对于#1的生成时间间隔。它会做为LaserScanToPointCloudWithIntensities(...)返回值,对应图2中的变量“time”。这个时刻很重要,称为零时刻。
| msg.header.stamp | timestamp/tiime/零时刻 | 间隔 |
| 637720359854370855 | 637720359869883557 | 15512702(1.55127秒) |
三、[sensor::TimedPointCloud]points
在SensorBridge::HandleLaserScan(),会把sensor::PointCloudWithIntensities转成sensor::TimedPointCloud类型。转换后,点云存放在points字段。
从PointCloudWithIntensities看到,sensor::TimedPointCloud是它的一个字段points,此次转化是不是把它提取出来单独形成一个独立变量?让进入HandleLaserScan。
void SensorBridge::HandleLaserScan(
const std::string& sensor_id, const carto::common::Time time,
const std::string& frame_id,
const carto::sensor::PointCloudWithIntensities& points) {
if (points.points.empty()) {
return;
}
CHECK_LE(points.points.back().time, 0.f);
// TODO(gaschler): Use per-point time instead of subdivisions.
for (int i = 0; i != num_subdivisions_per_laser_scan_; ++i) {
const size_t start_index =
points.points.size() * i / num_subdivisions_per_laser_scan_;
const size_t end_index =
points.points.size() * (i + 1) / num_subdivisions_per_laser_scan_;
// num_subdivisions_per_laser_scan_ == 1时,以下这语句等于以points.points复值构造出subdivision。
carto::sensor::TimedPointCloud subdivision(
points.points.begin() + start_index, points.points.begin() + end_index);
if (start_index == end_index) {
continue;
}
// num_subdivisions_per_laser_scan_ == 1时,time_to_subdivision_end值是0。
const double time_to_subdivision_end = subdivision.back().time;
// 'subdivision_time' is the end of the measurement so sensor::Collator will
// send all other sensor data first.
// num_subdivisions_per_laser_scan_ == 1时,
// subdivision_time就是LaserScanToPointCloudWithIntensities算出的timestamp,即零时刻。
const carto::common::Time subdivision_time =
time + carto::common::FromSeconds(time_to_subdivision_end);
...
sensor_to_previous_subdivision_time_[sensor_id] = subdivision_time;
// num_subdivisions_per_laser_scan_ == 1时,time_to_subdivision_end值是0,for循环不影响point值。
for (auto& point : subdivision) {
point.time -= time_to_subdivision_end;
}
// num_subdivisions_per_laser_scan_ == 1时,
// subdivision就是从PointCloudWithIntensities把TimedPointCloud抽出来单独形成一个独立变量:subdivision。
// subdivision_time则是零时刻。
HandleRangefinder(sensor_id, subdivision_time, frame_id, subdivision);
}
}num_subdivisions_per_laser_scan_是个配置变量,默认值1。值是1时,subdivision就是从PointCloudWithIntensities把TimedPointCloud抽出来单独形成一个独立变量:subdivision。subdivision_time则等于零时刻。
分段处理目的:尽量减小运动对测量匹配的影响,尤其是对于速度/频率比很高的。当然,运动速度很快的就需要高频率的雷达。
四、[sensor::TimedPointCloudData](TimedPointCloud)ranges
struct TimedPointCloudData {
common::Time time;
Eigen::Vector3f origin;
TimedPointCloud ranges;
// 'intensities' has to be same size as 'ranges', or empty.
std::vector<float> intensities;
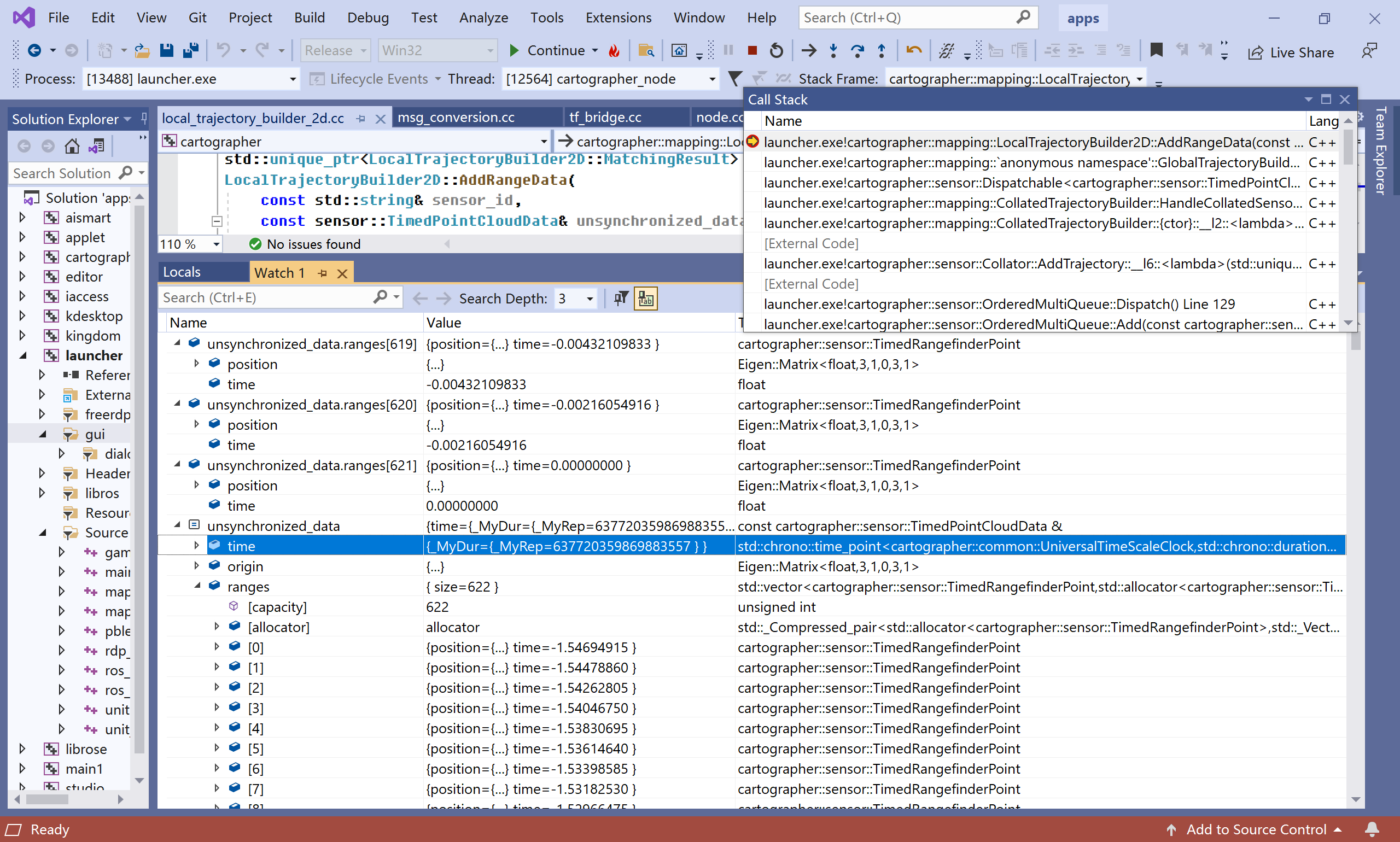
};在SensorBridge::HandleRangefinder,会调用sensor::TransformTimedPointCloud(...),把TimedPointCloud中点云进行坐标变换。变换后,点云放在TimedPointCloudData的rangess字段,数据结构仍是std::vector<TimedRangefinderPoint>,该vector另有一个别称:TimedPointCloud。
void SensorBridge::HandleRangefinder(
const std::string& sensor_id, const carto::common::Time time,
const std::string& frame_id, const carto::sensor::TimedPointCloud& ranges) {
if (!ranges.empty()) {
CHECK_LE(ranges.back().time, 0.f);
}
const auto sensor_to_tracking =
tf_bridge_.LookupToTracking(time, CheckNoLeadingSlash(frame_id));
if (sensor_to_tracking != nullptr) {
trajectory_builder_->AddSensorData(
sensor_id, carto::sensor::TimedPointCloudData{
time, sensor_to_tracking->translation().cast<float>(),
carto::sensor::TransformTimedPointCloud(
ranges, sensor_to_tracking->cast<float>())});
}
}首先要理解HandleRangefinder操作的背景。到目前为止,TimedPointCloud中存储的是直角坐标,其坐标系是slam传感器的坐标系,这个坐标系的frame_id来自传感器发自消息中的msg->header.frame_id,由传感器驱动定义,一般叫“laser”。cartographer另定义了一个坐标系,frame_id取自配置变量tracking_frame,HandleRangefinder操作目的就是把坐标值从“laser”坐标系变换到<tracking_frame>坐标系下的坐标。由于要发生坐标变换,点云坐标值可能发生改变,但存储格式不会变,还是Eigen::Vector3f。
在不少场景,像rose_ros,tracking_frame变量值是“base_footprint”,变量sensor_to_tracking存储着laser-->base_footprint的tf。也就是说,如果sensor_to_tracking不是0,这次转换会改变坐标值。
固名思义,base_footprint语义是底盘坐标系、机器人坐标系,这坐标系原点和雷达原点往往有着固定关系。rose_ros用发布静态tf发法让cartographer知道laser-->base_footprint的tf。示例:translation(0, 0, 0.098)、rotation(0, 0, 0)。可这么设想这机器人结构:激光雷达放在机器人中央,但雷达距离地面9.8厘米。有了sensor_to_tracking后,便可用TimedPointCloudData{...}生成各字段。
- time:time,零时刻。
- origin:(tracking_frame_坐标系)“laser”坐标系原点在tracking_frame_坐标系下的坐标。在示例,tracking_frame_是“base_footprint”坐标系时,这个值(0, 0, 0.098)。
- ranges:(tracking_frame_坐标系)点云数据在tracking_frame_坐标系下的坐标。即sensor_to_tracking乘以之前得到的TimedPointCloud类型的ranges。
至此点云存放在一个TimedPointCloudData类型的变量中,作为参数传入LocalTrajectoryBuilder2D::AddRangeData。图3显示了sensor::TimedPointCloudData,高亮的变量“time”就是LaserScanToPointCloudWithIntensities(...)算出的timestamp,即零时刻。
五、[sensor::TimedPointCloudOriginData](std::vector<RangeMeasurement>)ranges
ecstruct TimedPointCloudOriginData {
struct RangeMeasurement {
// 该点坐标、时间戳。
TimedRangefinderPoint point_time;
float intensity;
// 该点用了“origins”中哪个原点,对单一、有序场景,既然origins.size()总是1,那它只能是0。
size_t origin_index;
};
common::Time time;
// ranges中点云涉及哪些坐标系,origins存储着这些坐标系原点在tracking_frame_坐标系下的坐标。
// 针对单一、有序场景,传感器只涉及一个坐标系,像“laser”,所以origins.size()总是1,值是TimedPointCloudData.origin。
std::vector<Eigen::Vector3f> origins;
std::vector<RangeMeasurement> ranges;
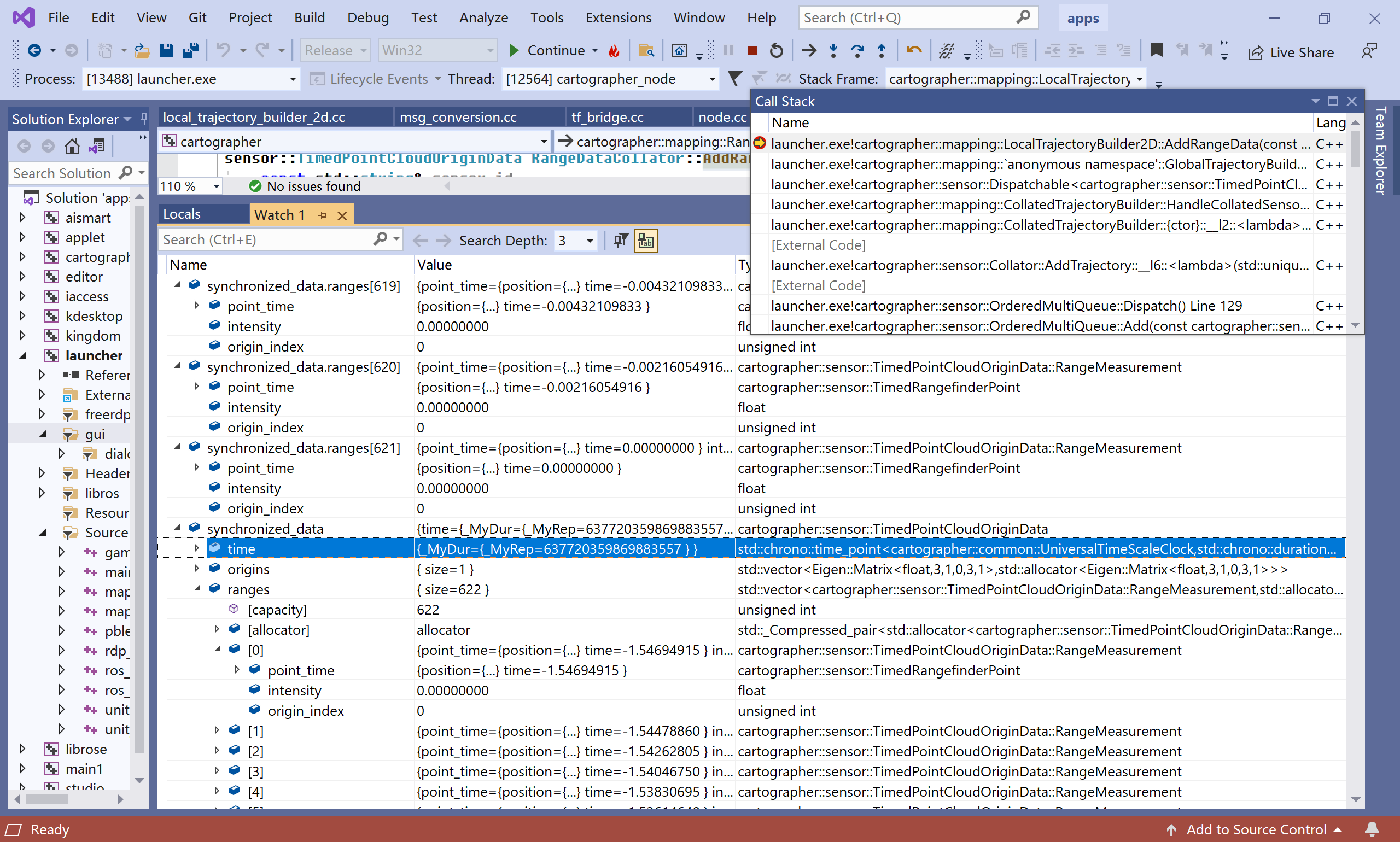
};LocalTrajectoryBuilder2D::AddRangeData,会调用range_data_collator_.AddRangeData(...),把TimedPointCloudData中点云进行变换。变换后,变量synchronized_data类型是TimedPointCloudOriginData,点云放在TimedPointCloudOriginData的ranges字段,数据结构是std::vector<RangeMeasurement>。
std::unique_ptr<LocalTrajectoryBuilder2D::MatchingResult>
LocalTrajectoryBuilder2D::AddRangeData(
const std::string& sensor_id,
const sensor::TimedPointCloudData& unsynchronized_data) {
auto synchronized_data =
range_data_collator_.AddRangeData(sensor_id, unsynchronized_data);
if (synchronized_data.ranges.empty()) {
LOG(INFO) << "Range data collator filling buffer.";
return nullptr;
}
...
}说下这个操作背景。设备可能有N(N > 1)个点云传感器,收到点云时,每个传感器放在自已的TimedPointCloudData,意味着在[current_start_, current_end_]这段间隔内,须要把这N个TimedPointCloudData融合成一个点云,TimedPointCloudOriginData就用于表示这个生成点云的数据结构。这N个传感器有着自个的“laser”坐标系,转换到tracking_frame_坐标系有着自已的原点,正如名称所示,TimedPointCloudData、TimedPointCloudOriginData主要差别在于原点字段。
range_data_collator_是RangeDataCollator类的对象,该类主要功能是执行多传感器时同步融合点云数据。“cartographer 代码思想解读(8)- 多激光传感器同步融合RangeDataCollator”有关于RangeDataCollator::AddRangeData的详细注释。这里只给个结论:对单一、有序场景,其产生的TimedPointCloudOriginData是TimedPointCloudData的原样复制。
怎么复制?因为laser坐标系个数要从1变成N,相比输入TimedPointCloudData,作为输出的TimedPointCloudOriginData,表示laser坐标系原点的字段名从“origin”变成了“origins”,类型从Eigen::Vector3f变成std::vector<Eigen::Vector3f>。针对单一、有序场景,origins.size()总是1,值是TimedPointCloudData.origin,即“laser”坐标系原点在tracking_frame_坐标系下的坐标。在示例,tracking_frame_是“base_footprint”,这个值(0, 0, 0.098)。
两种类型中的“ranges”字段,虽然类型不一样了,但针对每个点,只是后者多了个origin_index字段,作用是指示该点用了“origins”中哪个原点,对单一、有序场景,既然origins.size()总是1,那它只能是0。至于存储坐标值、时间戳,都用了TimedRangefinderPoint,值原样复制。
LocalTrajectoryBuilder2D::AddRangeData得到TimedPointCloudOriginData类型点云数据后,将用它计算位姿,以及建图。