
一、顶层逻辑
- [cartographer_node节点]Node::Node构造函数
1、创建“submap_query”Server。
2、创建间隔submap_publish_period_sec秒(默认0.3秒)的定时器,处理例程Node::PublishSubmapList,用于定时发布“submap_list”话题。 - [cartographer_occupancy_grid节点]Node::Node构造函数
1、创建“submap_query”Client。
2、订阅“submap_list”话题。
3、创建间隔publish_period_sec秒(不是lua配置,默认1秒)的定时器,处理例程Node::DrawAndPublish,用于定时发布“map”话题。 - [cartographer_occupancy_grid节点]收到“submap_list”话题,回调Node::HandleSubmapList(),负责根据子图列表生成submap_slices_,处理后,submap_slices_已将概率图转成cario图面,但没有将子图拼成大地图。处理过程中,“submap_list”给出了子图索引、绝对位姿、概率图版本,但没有该子图概率图。一旦没有得到过该子图的概率图或概率图版本发生变化,会以子图索引为参数调用“submap_query”服务获得概率图。
- [cartographer_occupancy_grid节点]cpu调度到Node::DrawAndPublish定时器
1、把submap_slices_中子图拼成大地图,结果存放在painted_slices。
2、把painted_slices转成msgs::OccupancyGrid,基于它发布个“map”。
void Node::DrawAndPublish(const ::ros::WallTimerEvent& unused_timer_event) { absl::MutexLock locker(&mutex_); // last_frame_id_: "map" if (submap_slices_.empty() || last_frame_id_.empty()) { return; } // submap_slices_存储着最新子图列表,submap_slices_[n].surface存储着cairo_surface_t类型的图面。 auto painted_slices = PaintSubmapSlices(submap_slices_, resolution_); // painted_slices存储拼出的大地图。painted_slices.surface是cairo_surface_t类型的图面, std::unique_ptr<nav_msgs::OccupancyGrid> msg_ptr = CreateOccupancyGridMsg( painted_slices, resolution_, last_frame_id_, last_timestamp_); occupancy_grid_publisher_.publish(*msg_ptr); }
二、拼接地图:PaintSubmapSlices
PaintSubmapSlices执行着DrawAndPublish的第一个任务:把submap_slices_中子图拼成大地图。
<cartographer>/cartographer/io/submap_painter.cc ------ PaintSubmapSlicesResult PaintSubmapSlices( const std::map<::cartographer::mapping::SubmapId, SubmapSlice>& submaps, const double resolution) { Eigen::AlignedBox2f bounding_box; { auto surface = MakeUniqueCairoSurfacePtr( cairo_image_surface_create(kCairoFormat, 1, 1)); auto cr = MakeUniqueCairoPtr(cairo_create(surface.get())); const auto update_bounding_box = [&bounding_box, &cr](double x, double y) { cairo_user_to_device(cr.get(), &x, &y); bounding_box.extend(Eigen::Vector2f(x, y)); }; // 第一个CairoPaintSubmapSlices,算出地图尺寸、map坐标系原点。 CairoPaintSubmapSlices( 1. / resolution, submaps, cr.get(), [&update_bounding_box](const SubmapSlice& submap_slice) { update_bounding_box(0, 0); update_bounding_box(submap_slice.width, 0); update_bounding_box(0, submap_slice.height); update_bounding_box(submap_slice.width, submap_slice.height); }); } const int kPaddingPixel = 5; // 最终地图的宽度、高度各多了2*kPaddingPixel个栅格。 const Eigen::Array2i size( std::ceil(bounding_box.sizes().x()) + 2 * kPaddingPixel, std::ceil(bounding_box.sizes().y()) + 2 * kPaddingPixel); const Eigen::Array2f origin(-bounding_box.min().x() + kPaddingPixel, -bounding_box.min().y() + kPaddingPixel); // size指示地图尺寸,有了它便可创建用于存储地图的cairo_surface_t图面了 auto surface = MakeUniqueCairoSurfacePtr( cairo_image_surface_create(kCairoFormat, size.x(), size.y())); { auto cr = MakeUniqueCairoPtr(cairo_create(surface.get())); cairo_set_source_rgba(cr.get(), 0.5, 0.0, 0.0, 1.); cairo_paint(cr.get()); cairo_translate(cr.get(), origin.x(), origin.y()); // 第二个CairoPaintSubmapSlices,将各子图画到地图 CairoPaintSubmapSlices(1. / resolution, submaps, cr.get(), [&cr](const SubmapSlice& submap_slice) { cairo_set_source_surface( cr.get(), submap_slice.surface.get(), 0., 0.); cairo_paint(cr.get()); }); cairo_surface_flush(surface.get()); } return PaintSubmapSlicesResult(std::move(surface), origin); }
PaintSubmapSlices依次执行两次CairoPaintSubmapSlices,第一次的目的算出地图尺寸、map坐标系原点;第二次目的是把子图画到地图。
void CairoPaintSubmapSlices( const double scale, const std::map<::cartographer::mapping::SubmapId, SubmapSlice>& submaps, cairo_t* cr, std::function<void(const SubmapSlice&)> draw_callback) { cairo_scale(cr, scale, scale); for (auto& pair : submaps) { const auto& submap_slice = pair.second; if (submap_slice.surface == nullptr) { return; } // submap_slice.pose。来自“submap_list”消息。值就是Global SLAM优化出的该子图的全局位姿。 // submap_slice.slice_pose。来自“submap_query”服务。表示概率图的laser原点。2D时,旋转部分一定是0。 const Eigen::Matrix4d homo = ToEigen(submap_slice.pose * submap_slice.slice_pose).matrix(); cairo_save(cr); cairo_matrix_t matrix; cairo_matrix_init(&matrix, homo(1, 0), homo(0, 0), -homo(1, 1), -homo(0, 1), homo(0, 3), -homo(1, 3)); cairo_transform(cr, &matrix); const double submap_resolution = submap_slice.resolution; cairo_scale(cr, submap_resolution, submap_resolution); // Invokes caller's callback to utilize slice data in global cooridnate // frame. e.g. finds bounding box, paints slices. draw_callback(submap_slice); cairo_restore(cr); } }
CairoPaintSubmapSlices会枚举submaps中各子图,对每张子图,先是准备好环境,然后调用真实执行操作的draw_callback。准备环境时,一个重要操作是要准备好cairo变换关系,即变量matrix表示的二维变换矩阵。matrix来自两个位姿:submap_slice.pose、submap_slice.slice_pose。
- submap_slice.pose。来自“submap_list”消息。值就是Global SLAM优化出的该子图的全局位姿。即使是2D时,旋转部分一般不是0。
- submap_slice.slice_pose。来自“submap_query”服务。表示概率图的laser原点。2D时,旋转部分一定是0。参考“概率栅格图(ProbabilityGrid)”中“DrawToSubmapTexture”。
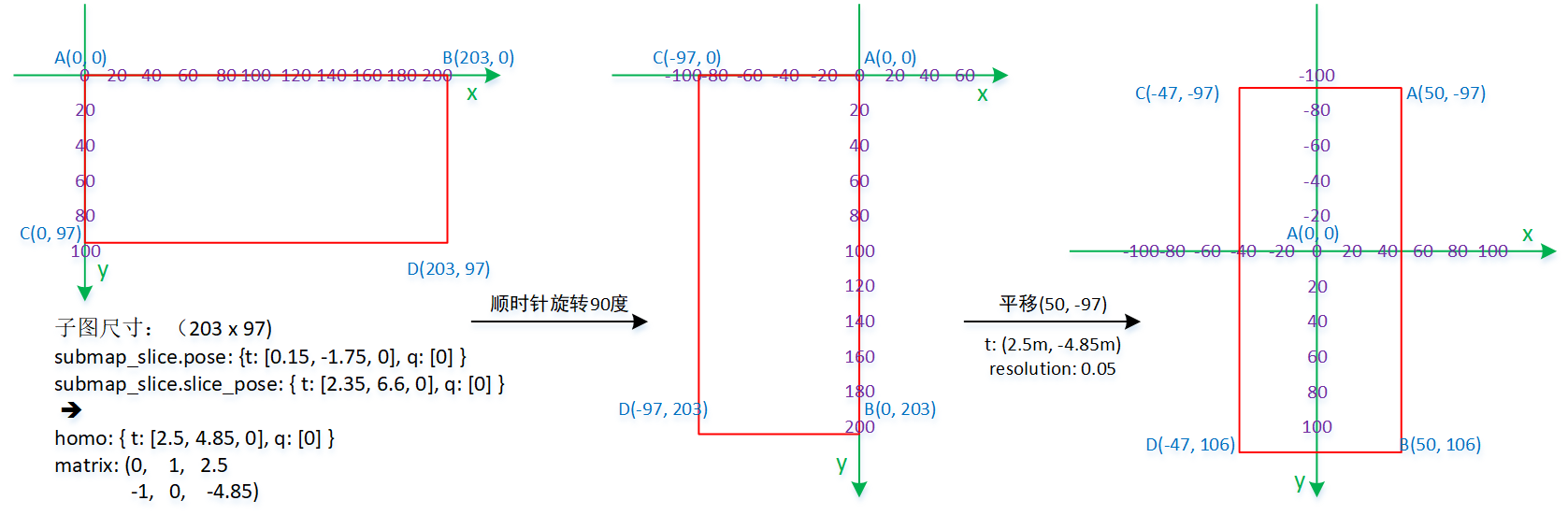
homo是这两个位姿的“和”,至于接下homo生成matrix,个人能力不足,还没理解。但如果不考虑submap_slice.pose旋转部分,即当旋转是0时,变换可拆分为两个步骤:先顺时针旋转90度,再平移。这里给出一个update_bounding_box时示例,子图尺寸是(203 x 97),要update_bounding_box的四个点依次是A(0, 0)、B(203, 0)、C(0, 97)、D(207, 97)。
关于PaintSubmapSlices的未解决疑问。
- 在表示概率栅格图坐标系时,我把y表示成由上到下增,和直角坐标系相反,这是对的吗?(这么做一个原因,计算origin时取的是“-bounding_box.min().y()”,认为min左上角,前面有个负号)。
- map坐标系原点origin直接等于(-bounding_box.min().x() + kPaddingPixel, -bounding_box.min().y() + kPaddingPixel),这个bounding_box不应该是包含所有子图的矩形吗?它的左上角怎么成了了origin?
- ProbabilityGrid由点云生成概率时,x、y是互换的,是在哪换回来?
- matrix矩阵中,偏移中的y加了负号,为什么?