
- 本文框架来自“Cartographer源码阅读12—LocalTrajectoryBuilder2D成员函数解读”。
- range_data_in_local存储着odom坐标系下的点云,值格式是3D坐标。
一、LocalTrajectoryBuilder2D::AddRangeData
struct TimedRangefinderPoint {
// 该点的3D坐标。2D点云时,z总是0,x、y满足sqrt(x*x + y*y)=R,tan(y/x)=Theta。
Eigen::Vector3f position;
// 该点的时间戳,单位秒。
float time;
};RangeData是AddRangeData常用的数据类型。
struct RangeData {
Eigen::Vector3f origin;
PointCloud returns;
PointCloud misses;
};- origin值是range_data_poses.back().translation()。零时刻时base_footprint坐标系原点在odom坐标系的坐标,即base_footprint-->odom坐标变换中平移部分。
- returns。点云中那些在处理能力范围内的点的坐标。PointCloud是class,可认为就是个std::vector,vector中单元是RangefinderPoint。这类型和之前的TimedPointCloudData、TimedPointCloudOriginData存储坐标值的方法是一样的。
- misses。点云中那些超出处理能力范围的点的坐标。若*.lua的min_range、max_range配置值和slam传来的sensor_msgs::LaserScan的一样,那它是空。
AddRangeData是AddSensorData两任务的第一个:新收到一帧点云了,估计机器人现在局部位姿,并将点云画到概率图。
std::unique_ptr
LocalTrajectoryBuilder2D::AddRangeData(
const std::string& sensor_id,
const sensor::TimedPointCloudData& unsynchronized_data) {
// sensor::TimedPointCloudData ==> sensor::TimedPointCloudOriginData
auto synchronized_data =
range_data_collator_.AddRangeData(sensor_id, unsynchronized_data);
if (synchronized_data.ranges.empty()) {
LOG(INFO) << "Range data collator filling buffer.";
return nullptr;
}
synchronized_data类型是sensor::TimedPointCloudOriginData。点云:从LaserScan到TimedPointCloudOriginData已叙述了sensor::TimedPointCloudOriginData情况。接下要把TimedPointCloudOriginData进一步转换为sensor::RangeData。
sensor::RangeData是点云数据在(range_data_poses)坐标系下的坐标。
// 取点云获取的时间为基准初始化PoseExtrapolator
const common::Time& time = synchronized_data.time;
// Initialize extrapolator now if we do not ever use an IMU.
if (!options_.use_imu_data()) {
// 对rose_ros,use_imu_data总是false,总是进这入口。
InitializeExtrapolator(time);
}
if (extrapolator_ == nullptr) {
// Until we've initialized the extrapolator with our first IMU message, we
// cannot compute the orientation of the rangefinder.
LOG(INFO) << "Extrapolator not yet initialized.";
return nullptr;
}
CHECK(!synchronized_data.ranges.empty());
// TODO(gaschler): Check if this can strictly be 0.
CHECK_LE(synchronized_data.ranges.back().point_time.time, 0.f);
// 第一个点的采集时间(time_first_point)等于零时刻(time)加上第一个点记录的相对时间
const common::Time time_first_point =
time +
common::FromSeconds(synchronized_data.ranges.front().point_time.time);
// 如果该时间比PoseExtrapolator的最新时间还要早,说明在第一个点被采集时,PoseExtrapolator还没初始化
if (time_first_point < extrapolator_->GetLastPoseTime()) {
LOG(INFO) << "Extrapolator is still initializing.";
return nullptr;
}
synchronized_data.ranges.back().point_time类型是TimedRangefinderPoint,封装了点云最后那个有效点的坐标和时间。按赋值规则,point_time.time存储的是相对时间,最后一个点的值应该是0,前面点则是相对它偏移的秒数,因为时间上发生在前面,所以都是负数。如果最后一个点就是有效点,那ranges.back().point_time.time应该是0,否则是负数。总之得满足<=0。
第一个点的采集时间(time_first_point)等于零时刻(time)加上第一个点记录的相对时间。
接下遍历每个点,针对每个点,用PoseExtrapolator推算机器人在该点的Pose,放入range_data_poses这个向量。
std::vector<transform::Rigid3f> range_data_poses;
// 为该集合预分配内存大小
range_data_poses.reserve(synchronized_data.ranges.size());
bool warned = false;
for (const auto& range : synchronized_data.ranges) {
// 点云中每个点的采集时刻
common::Time time_point = time + common::FromSeconds(range.point_time.time);
if (time_point < extrapolator_->GetLastExtrapolatedTime()) {
// 如果该时刻早于PoseExtrapolator的时间
if (!warned) {
LOG(ERROR)
<< "Timestamp of individual range data point jumps backwards from "
<< extrapolator_->GetLastExtrapolatedTime() << " to " << time_point;
warned = true;
}
// 时间设置为PoseExtrapolator的时间
time_point = extrapolator_->GetLastExtrapolatedTime();
}
// 推算time_point这个时间点的Pose
range_data_poses.push_back(
extrapolator_->ExtrapolatePose(time_point).cast());
}range_data_poses用于记录零时刻时,各个扫描点所对应的、用于计算base_footprint-->odom坐标变化的位姿。它的长度等于点云中点数,而且索引一一对应,即range_data_poses的第一个位姿用于点云的第一个点,依次类推。为更直观理解,让看几种场景下range_data_poses实时值。
场景1:机器人没有移动过,即平移和旋转都是0。
- range_data_poses[0/662]: { t: [0, 0, 0], q: [deg:0] }, time_point:637802439697160986(-0.13299)
- range_data_poses[1/662]: { t: [0, 0, 0], q: [deg:0] }, time_point:637802439697160986(-0.13281)
- range_data_poses[2/662]: { t: [0, 0, 0], q: [deg:0] }, time_point:637802439697160986(-0.13262)
- range_data_poses[3/662]: { t: [0, 0, 0], q: [deg:0] }, time_point:637802439697160986(-0.13244)
- range_data_poses[4/662]: { t: [0, 0, 0], q: [deg:0] }, time_point:637802439697160986(-0.13225)
- ...
- range_data_poses[657/662]: { t: [0, 0, 0], q: [deg:0] }, time_point:637802439697160986(-0.00074)
- range_data_poses[658/662]: { t: [0, 0, 0], q: [deg:0] }, time_point:637802439697160986(-0.00055)
- range_data_poses[659/662]: { t: [0, 0, 0], q: [deg:0] }, time_point:637802439697160986(-0.00037)
- range_data_poses[660/662]: { t: [0, 0, 0], q: [deg:0] }, time_point:637802439697160986(-0.00018)
- range_data_poses[661/662]: { t: [0, 0, 0], q: [deg:0] }, time_point:637802439697160986(0)
场景2:机器人向东南移动,大概停在了(1米, -0.8米)、角度-57度。
- range_data_poses[0/713]: { t: [0.990458, -0.810532, 0], q: [deg:-57.6755] }, time_point:637802440377018155(-0.13442)
- range_data_poses[1/713]: { t: [0.990458, -0.810532, 0], q: [deg:-57.6752] }, time_point:637802440377018155(-0.13424)
- range_data_poses[2/713]: { t: [0.990458, -0.810532, 0], q: [deg:-57.6748] }, time_point:637802440377018155(-0.13405)
- range_data_poses[3/713]: { t: [0.990458, -0.810532, 0], q: [deg:-57.6744] }, time_point:637802440377018155(-0.13386)
- range_data_poses[4/713]: { t: [0.990458, -0.810532, 0], q: [deg:-57.6741] }, time_point:637802440377018155(-0.13368)
- ...
- range_data_poses[708/713]: { t: [0.990457, -0.810554, 0], q: [deg:-57.4169] }, time_point:637802440377018155(-0.00074)
- range_data_poses[709/713]: { t: [0.990457, -0.810554, 0], q: [deg:-57.4166] }, time_point:637802440377018155(-0.00056)
- range_data_poses[710/713]: { t: [0.990457, -0.810554, 0], q: [deg:-57.4162] }, time_point:637802440377018155(-0.00037)
- range_data_poses[711/713]: { t: [0.990457, -0.810554, 0], q: [deg:-57.4159] }, time_point:637802440377018155(-0.00018)
- range_data_poses[712/713]: { t: [0.990457, -0.810554, 0], q: [deg:-57.4155] }, time_point:637802440377018155(0)
[0/662]表示该点云有662个点,这是索引0处pose。time_point就是代码中的time_point,值等于“time + common::FromSeconds(range.point_time.time)”。从这两个示例可看到,经过相加后,所有扫描点的time_point都到了同一个时间点,即零时刻。后面()中的是加法中第二部分range.point_time.time,最后一个点的time是0,序号越小,time是越小的负数。综上所述,range_data_poses有以下特点。
- 所有位姿都计算在零时刻。
- 长度等于点云中点数,而且两者索引一一对应,即range_data_poses的第一个位姿用于点云的第一个点,依次类推。
- 用于计算base_footprint-->odom坐标变化的位姿。即它乘以点云后,就可得到点云在odom坐标系下的坐标。
- 当中所有位姿值基本一样大小。
// 轨迹开始时刻。只在初始时执行一次。之后num_accumulated不再等于0,该语句就不执行了
if (num_accumulated_ == 0) {
// 'accumulated_range_data_.origin' is uninitialized until the last
// accumulation.
accumulated_range_data_ = sensor::RangeData{{}, {}, {}};
}
// 遍历每一个点
// Drop any returns below the minimum range and convert returns beyond the
// maximum range into misses.
for (size_t i = 0; i < synchronized_data.ranges.size(); ++i) {
// 处理点云中的第i个有效点,叫hit点。
const sensor::TimedRangefinderPoint& hit =
synchronized_data.ranges[i].point_time;
// synchronized_data.origins.at(synchronized_data.ranges[i].origin_index)是第i个有效点的原点,像(0, 0, 0.098)
const Eigen::Vector3f origin_in_local =
range_data_poses[i] *
synchronized_data.origins.at(synchronized_data.ranges[i].origin_index);
// 将hit点坐标从base_footprint坐标系转换到odom(local)坐标系
sensor::RangefinderPoint hit_in_local =
range_data_poses[i] * sensor::ToRangefinderPoint(hit);
const Eigen::Vector3f delta = hit_in_local.position - origin_in_local;
// 该向量的模
const float range = delta.norm();
delta是odom坐标系下由hit点到origin_in_local的射线。origin_in_local是“laser”坐标系原点odom下的3D直角坐标,当中值是先从laser下的(0, 0, 0),转换到base_foorpint下的(0, 0, 0.098),最后通过range_data_poses[i]这个tf转换到odom。range是delta这个向量的模,可近乎这么认为,它就是“laser”这个极坐标下,该点的极径r。
if (range >= options_.min_range()) {
if (range <= options_.max_range()) {
// 如果该向量的模在合理范围内,则把他压入accumulated_range_data_点集中
accumulated_range_data_.returns.push_back(hit_in_local);
} else {
// 否则,放入misses集中
hit_in_local.position =
origin_in_local +
options_.missing_data_ray_length() / range * delta;
accumulated_range_data_.misses.push_back(hit_in_local);
}
}
}[options_.min_range, options_.max_range]指示了catographer要处理的点坐标范围。举个例子,激光雷达报告的点范围是[0.15m, 12m],考虑到效率,用options缩小一次点云处理范围到[0.08m, 8m]。对于此次超过8米的点,等待着机器人更靠近它时再处理。这样可缩小后面的概率图,从而降低整体cpu、内存消耗。
对[0.1m, 8m]内的点,它们是要处理的,于是放入accumulated_range_data_.returns,这很好理解。那为什么把(8m, 12m]的放在accumulated_range_data_.misses?首要要知道,放入misses的坐标依旧是个在[0.08m, 8m]范围内的点。从原点到miss点可形成一条射线,可以确定这整条射线涉及到点应该都没有障碍物,后面CastRays正是用这个结论把点云画到概论图,参考“概率栅格图(ProbabilityGrid)”。
限定了不能让放入misses集合的点坐标超出max_range。配置时,missing_data_ray_length要小于max_range,目前这个值是1.0米,小于max_range的8米。
++num_accumulated_;
if (num_accumulated_ >= options_.num_accumulated_range_data()) {
// 点云帧数大于1的话(num_accumulated_range_data在*.lua默认值是1)
const common::Time current_sensor_time = synchronized_data.time;
absl::optional sensor_duration;
if (last_sensor_time_.has_value()) {
sensor_duration = current_sensor_time - last_sensor_time_.value();
}
last_sensor_time_ = current_sensor_time;
num_accumulated_ = 0;
// 估计重力
const transform::Rigid3d gravity_alignment = transform::Rigid3d::Rotation(
extrapolator_->EstimateGravityOrientation(time));
// TODO(gaschler): This assumes that 'range_data_poses.back()' is at time
// 'time'.
accumulated_range_data_.origin = range_data_poses.back().translation();
// 调用AddAccumulatedRangeData进行匹配、插入数据等。返回MatchingResult
return AddAccumulatedRangeData(
time,
TransformToGravityAlignedFrameAndFilter( // 调用这个函数进行重力align
gravity_alignment.cast() * range_data_poses.back().inverse(),
accumulated_range_data_),
gravity_alignment, sensor_duration);解释下gravity_alignment.cast() * range_data_poses.back().inverse()。这是把odom坐标系下的点云(accumulated_range_data_)依次做两次坐标变换,第一次变换是range_data_poses.back().inverse(),第二次变换是gravity_alignment。由于range_data_poses.back().inverse()是最后一个点的位姿的逆,因而对最后一个点来说,经过第一次变化后,它完全恢复到base_footprint坐标系下的坐标,即等于synchronized_data中的值。其它点也变换到base_footprint坐标系,只是和synchronized_data中的值有一点偏差,毕竟range_data_poses[i]中的位姿并不完全等于range_data_poses.back()。gravity_alignment中平移总是0、只有旋转,可直观想象为是在第一次变化后的基础上逆时针旋转gravity_alignment.rotation度。经过这两次变化后的点云(gravity_aligned_range_data)将送入优化器
} return nullptr; }
二、LocalTrajectoryBuilder2D::AddAccumulatedRangeData
AddAccumulatedRangeData依次做三件事。
- 算出此帧点云后的local_pose。
- 用local_pose计算出ScanMatch优化后的点云,存储在变量range_data_in_local。
- 调用InsertIntoSubmap,把此帧点云画向概率图。
AddAccumulatedRangeData涉及两种点云数据:gravity_aligned_range_data和range_data_in_local,它们类型都是sensor::RangeData,都属odom坐标系。
- time。零时刻。
- gravity_aligned_range_data。经过transform_to_gravity_aligned_frame修正过的点云数据,即融合了位姿误差。有四个用途。1)以参数送入ScanMatch。2)ScanMatch后,用于恢复出ScanMatch优化后的点云range_data_in_local。3)作为参数送入InsertIntoSubmap。4)赋值到InsertionResult.constant_data(类型TrajectoryNode::Data).filtered_gravity_aligned_point_cloud字段。
- gravity_alignment。此次点云后应该的imu_pose。
std::unique_ptr
LocalTrajectoryBuilder2D::AddAccumulatedRangeData(
const common::Time time,
const sensor::RangeData& gravity_aligned_range_data,
const transform::Rigid3d& gravity_alignment,
const absl::optional& sensor_duration) {
static int times = 0;
static double total_cost = 0;
trosverbose verbose("LocalTrajectoryBuilder2D::AddAccumulatedRangeData", times, total_cost);
if (gravity_aligned_range_data.returns.empty()) {
// 如果数据为空
LOG(WARNING) << "Dropped empty horizontal range data.";
return nullptr;
}
// Computes a gravity aligned pose prediction.
// 计算经过重力aligned的Pose
// 从PoseExtrapolator处获得未经重力aligned的Pose
const transform::Rigid3d non_gravity_aligned_pose_prediction =
extrapolator_->ExtrapolatePose(time);
// 重力align
const transform::Rigid2d pose_prediction = transform::Project2D(
non_gravity_aligned_pose_prediction * gravity_alignment.inverse());
// 生成一个自适应体素滤波器,对数据进行一下自适应体素滤波
const sensor::PointCloud& filtered_gravity_aligned_point_cloud =
sensor::AdaptiveVoxelFilter(gravity_aligned_range_data.returns,
options_.adaptive_voxel_filter_options());
if (filtered_gravity_aligned_point_cloud.empty()) {
return nullptr;
}
// local map frame <- gravity-aligned frame
// 调用ScanMathc函数进行匹配,求取Scan插入Submap的最优Pose
std::unique_ptr pose_estimate_2d =
ScanMatch(time, pose_prediction, filtered_gravity_aligned_point_cloud);
if (pose_estimate_2d == nullptr) {
//如果为空,表示匹配为空
LOG(WARNING) << "Scan matching failed.";
return nullptr;
}
// 考虑重力方向,将2d的pose变成3d的pose
const transform::Rigid3d pose_estimate =
transform::Embed3D(*pose_estimate_2d) * gravity_alignment;
// 将新的pose添加到PoseExtrapolator的Pose队列中
extrapolator_->AddPose(time, pose_estimate);
1/3:算出此帧点云后的local_pose。
- 外推出位姿差pose_prediction。
- 用ScanMatch进行优化,算出此帧点云后的local_pose,即变量pose_estimate。
- AddPose加到位姿外推器的timed_pose_queue_。
sensor::RangeData range_data_in_local = TransformRangeData(gravity_aligned_range_data, transform::Embed3D(pose_estimate_2d->cast()));
2/3:用local_pose计算出odom坐标系下点云,存储在变量range_data_in_local。
std::unique_ptr insertion_result = InsertIntoSubmap( time, range_data_in_local, filtered_gravity_aligned_point_cloud, pose_estimate, gravity_alignment.rotation());
3/3:调用InsertIntoSubmap,更新Submap,把此帧点云画向概率图,同时返回插入结果。
// 统计一下数据累计的时间
const auto wall_time = std::chrono::steady_clock::now();
if (last_wall_time_.has_value()) {
const auto wall_time_duration = wall_time - last_wall_time_.value();
kLocalSlamLatencyMetric->Set(common::ToSeconds(wall_time_duration));
if (sensor_duration.has_value()) {
kLocalSlamRealTimeRatio->Set(common::ToSeconds(sensor_duration.value()) /
common::ToSeconds(wall_time_duration));
}
}
const double thread_cpu_time_seconds = common::GetThreadCpuTimeSeconds();
if (last_thread_cpu_time_seconds_.has_value()) {
const double thread_cpu_duration_seconds =
thread_cpu_time_seconds - last_thread_cpu_time_seconds_.value();
if (sensor_duration.has_value()) {
kLocalSlamCpuRealTimeRatio->Set(
common::ToSeconds(sensor_duration.value()) /
thread_cpu_duration_seconds);
}
}
last_wall_time_ = wall_time;
last_thread_cpu_time_seconds_ = thread_cpu_time_seconds;
// 返回匹配结果
return absl::make_unique(
MatchingResult{time, pose_estimate, std::move(range_data_in_local),
std::move(insertion_result)});
}
三、点云:从TimedPointCloudOriginData到range_data_in_local
“点云:从LaserScan到TimedPointCloudOriginData”叙述了从雷达采到点云,一直到转成TimedPointCloudOriginData,即AddRangeData(...)中的synchronized_data。这里接着描述AddRangeData是如何把synchronized_data处理成表示点云在map坐标系下的坐标,并存储在range_data_in_local。
为直观,用一次点云的第一个和最后一个点作为示例,看它们的变化过程。
- 变量synchronized_data。点数:709
- front: {(-1.17182, -0.02045, 0.09799), r: 1.17200 theta: -178.99998}
- back: {(-1.18400, 0.00001, 0.09799), r: 1.18400 theta: 179.99947}
上面是这两个点的初始值,“sensor_msgs::LaserScan”有写,RPLIDAR A1M8在LaserScan报告的视场角是[-179, 180],front是第一个扫描点,-178.99998度,近似起始角度-179,back是最后一个,则近似终止角度180。
步骤1、得到点云未优化的、在odom坐标系下的坐标,放在accumulated_range_data_
这个步骤的目标是计算出点云未优化的、在odom坐标系下坐标,计算方法是以下这条语句。
sensor::RangefinderPoint hit_in_local = range_data_poses[i] * sensor::ToRangefinderPoint(hit);
range_data_poses是个std::vector,长度709,存储着对应709个点的未优化local_pose。这个乘法是个标准的两坐标系间欧氏变换,具体是把base_footprint坐标系中的坐标hit变换到odom坐标系。
- range_data_poses[front]: ({ t: [1.57805, 0.366646, 0], q: [25.9723] }) + {-178.99998}(-1.17182, -0.02045, 0.09799) = theta{-153.02765}
- range_data_poses[back]: ({ t: [1.56143, 0.381865, 0], q: [26.3522] }) + {179.99947}(-1.18400, 0.00001, 0.09799) = theta{-153.64837}
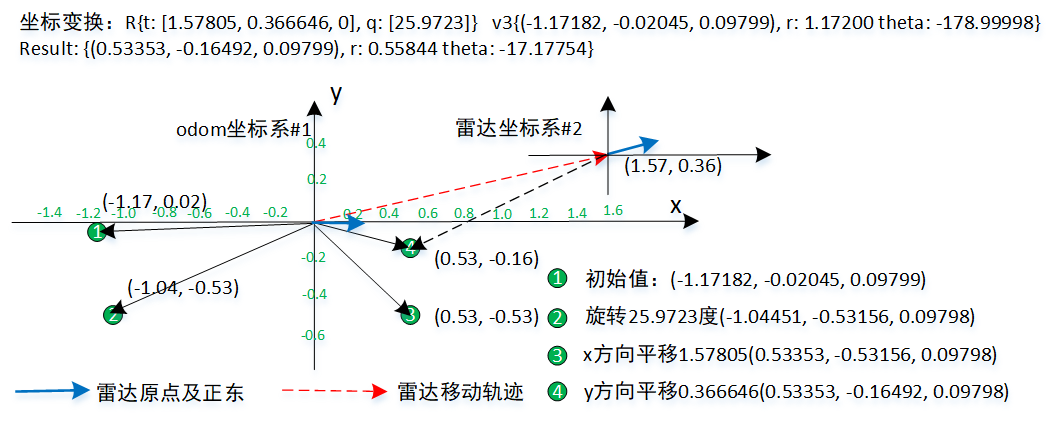
附:图1对应代码
{
Eigen::AngleAxisd rotation_vector(25.9723 * M_PI / 180, Eigen::Vector3d(0, 0, 1));
Eigen::Vector3d v(-1.17182, -0.02045, 0.09799);
Eigen::Vector3d v_rotated = rotation_vector * v;
SDL_Log("v_rotated: %.5f, %.5f, %.5f", v_rotated[0], v_rotated[1], v_rotated[2]);
Eigen::Vector3d t_x(1.57805, 0, 0);
Eigen::Vector3d v_result_x = v_rotated + t_x;
SDL_Log("v_result_x: %.5f, %.5f, %.5f", v_result_x[0], v_result_x[1], v_result_x[2]);
Eigen::Vector3d t_y(0, 0.366646, 0);
Eigen::Vector3d v_result = v_result_x + t_y;
SDL_Log("v_result: %.5f, %.5f, %.5f", v_result[0], v_result[1], v_result[2]);
}图1描述了front点坐标变换。为直观,把变换拆成三个操作,先旋转25.9723度,再x方向平移,最后y方向平移。过程中雷达转了25.9723度,在雷达坐标系,f点最终角度是(-178.99998 + 25.9723)度。但对odom坐标系,f点最终角度是-17.17754度。
从图1可看出:平移不影响角度,这说法要正确,是针对坐标系#2,坐标系#1下不成立。
- 变量accumulated_range_data_.returns。点数:709
- front: {(0.53353, -0.16492, 0.09799), r: 0.55844 theta: -17.17754}
- back: {(0.50046, -0.14368, 0.09799), r: 0.52068 theta: -16.01924}
上面是经过步骤1,这两个点的值。accumulated_range_data_类型是sensor::RangeData,后面各步骤会把点云处理成不同数值,但存储点云的变量类型就不再变了,包括range_data_in_local。
步骤2、重力校正,放在gravity_aligned_range_data
接下要执行ScanMatch,ScanMatch需要点云作为参数,参数须要是经过重力校正后的点云。
- gravity_alignment:{ t: [0, 0, 0], q: [24.65049] }
transform::Rigid3f transform_to_gravity_aligned_frame = gravity_alignment.cast<float>() * range_data_poses.back().inverse();
// 代入:{ t: [0, 0, 0], q: [24.65049] } * { t: [1.56143, 0.381865, 0], q: [26.3522] }
gravity_aligned_range_data = transform_to_gravity_aligned_frame * accumulated_range_data_;transform_to_gravity_aligned_frame是修正因子,左乘上它,这是把odom坐标系下的点云(accumulated_range_data_)依次做两次坐标变换,第一次变换是range_data_poses.back().inverse(),第二次变换是gravity_alignment。由于range_data_poses.back().inverse()是最后一个点的位姿的逆,因而对最后一个点来说,经过第一次变化后,它完全恢复到base_footprint坐标系下的坐标,即等于synchronized_data中的值。其它点也变换到base_footprint坐标系,只是和synchronized_data中的值有一点偏差,毕竟range_data_poses[i]中的位姿并不完全等于range_data_poses.back()。gravity_alignment中平移总是0、只有旋转,可直观想象为是在第一次变化后的基础上逆时针旋转gravity_alignment.rotation度。经过这两次变化后的点云(gravity_aligned_range_data)将送入优化器。
- 变量:gravity_aligned_range_data。点数:437
- front: {(-1.04368, -0.51602, 0.09799), r: 1.16428 theta: -153.69085}
- back: {(-1.07610, -0.49381, 0.09799), r: 1.18400 theta: -155.35002}。根据对修正因子(transform_to_gravity_aligned_frame)解释,此刻的值应该和base_footprint下synchronized_data中的值有着一样极径r,角度则逆时针旋转了24.65049度:179.99947 + 24.65049 - 360 = -155.35004。注意,此刻和synchronized_data中的x、y是不一样的,x、y一样是发生在第一次变换后,第二次变换时旋转了一个非0角度,自然要改x、y。
步骤3、重力恢复,放在range_data_in_local
ScanMatch了算出优化后的local_pose,即pose_estimate_2d,接下是用它恢复出点云,存储优化过的、在odom坐标系下的坐标。
sensor::RangeData range_data_in_local = transform::Embed3D(pose_estimate_2d->cast<float>()) * gravity_aligned_range_data
pose_estimate_2d“应该”是“gravity_alignment.cast<float>() * range_data_poses.back().inverse()”的inverse,“应该”加引号,是因为当中有过优化。
- pose_estimate/Embed3D(pose_estimate_2d):{ t: [1.56621, 0.382067, 0], q: [25.8245]}
- 变量:range_data_in_local。点数:437
- front: {(0.53331, -0.15523, 0.09799), r: 0.55545 theta: -16.22897}
- back: {(0.50044, -0.13369, 0.09799), r: 0.51799 theta: -14.95712}
以上是经过重力恢复后,两个点在odom坐标系的坐标,应该和重力校正前“未优化的坐标”差别不大。
四、LocalTrajectoryBuilder2D::TransformToGravityAlignedFrameAndFilter
// 将RangeData转化成重力校正后的数据,并经过VoxelFilter
// 关于VoxelFilter和AdaptiveVoxelFilter,可参见如下两个参考链接:
// 源码解读:https://blog.csdn.net/learnmoreonce/article/details/76218136
// VoxelFilter的原理:https://blog.csdn.net/xiaoma_bk/article/details/81780066
// cartographer中的VoxelFilter是把空间分为很多个立方体的栅格,然后一个栅格内可能有很多点,
// 但只用一个点来代表整个栅格中的所有点
// 简单说,这些滤波就是对点云数据的预处理:去除不合理的范围的点、合并相同位置的点等,从而减少点云数量,提高点云质量
sensor::RangeData
LocalTrajectoryBuilder2D::TransformToGravityAlignedFrameAndFilter(
const transform::Rigid3f& transform_to_gravity_aligned_frame,
const sensor::RangeData& range_data) const {
//裁剪数据,指定一定z轴范围内的数据。在/src/cartographer/configuration_files/trajectory_builder_2d.lua中找到
const sensor::RangeData cropped =
sensor::CropRangeData(sensor::TransformRangeData(
range_data, transform_to_gravity_aligned_frame),
options_.min_z(), options_.max_z());
// 进行体素化滤波
return sensor::RangeData{
cropped.origin,
sensor::VoxelFilter(cropped.returns, options_.voxel_filter_size()),
sensor::VoxelFilter(cropped.misses, options_.voxel_filter_size())};
}
五、LocalTrajectoryBuilder2D::ScanMatch
// 扫描匹配。输入参数:
// 1. 时间,
// 2. 由PoseExtrapolator预测的初始位姿pose_prediction
// 3. 经过重力aligned的RangeData
// 输出是对该帧传感器数据的最优pose。采用Ceres Scan Matcher
std::unique_ptr<transform::Rigid2d> LocalTrajectoryBuilder2D::ScanMatch(
const common::Time time, const transform::Rigid2d& pose_prediction,
const sensor::PointCloud& filtered_gravity_aligned_point_cloud) {
if (active_submaps_.submaps().empty()) {
return absl::make_unique<transform::Rigid2d>(pose_prediction);
}
// 获取要进行扫描匹配的Submap的index
std::shared_ptr<const Submap2D> matching_submap =
active_submaps_.submaps().front();
// The online correlative scan matcher will refine the initial estimate for
// the Ceres scan matcher.
// Online Correlative Scan Matcher会refine初始Pose
transform::Rigid2d initial_ceres_pose = pose_prediction;
if (options_.use_online_correlative_scan_matching()) {
// 如果配置项设置使用OnlineCorrelativeScanMatching。但配置项里默认该项为false
// 调用RealTimeCorrelativeScanMatcher2D的方法进行匹配。返回一个得分
const double score = real_time_correlative_scan_matcher_.Match(
pose_prediction, filtered_gravity_aligned_point_cloud,
*matching_submap->grid(), &initial_ceres_pose);
kRealTimeCorrelativeScanMatcherScoreMetric->Observe(score);
}
// 调用Ceres库来实现匹配。匹配结果放到pose_observation中
auto pose_observation = absl::make_unique<transform::Rigid2d>();
ceres::Solver::Summary summary;
ceres_scan_matcher_.Match(pose_prediction.translation(), initial_ceres_pose,
filtered_gravity_aligned_point_cloud,
*matching_submap->grid(), pose_observation.get(),
&summary);
// 统计残差
if (pose_observation) {
kCeresScanMatcherCostMetric->Observe(summary.final_cost);
const double residual_distance =
(pose_observation->translation() - pose_prediction.translation())
.norm();
kScanMatcherResidualDistanceMetric->Observe(residual_distance);
const double residual_angle =
std::abs(pose_observation->rotation().angle() -
pose_prediction.rotation().angle());
kScanMatcherResidualAngleMetric->Observe(residual_angle);
}
// 返回优化后的pose
return pose_observation;
}
六、LocalTrajectoryBuilder2D::InsertIntoSubmap
// 插入submap, 返回插入结果。这是在都已经完成匹配的情况下,调用该函数更新submap
std::unique_ptr<LocalTrajectoryBuilder2D::InsertionResult>
LocalTrajectoryBuilder2D::InsertIntoSubmap(
const common::Time time, const sensor::RangeData& range_data_in_local,
const sensor::PointCloud& filtered_gravity_aligned_point_cloud,
const transform::Rigid3d& pose_estimate,
const Eigen::Quaterniond& gravity_alignment) {
// 如果没有被MotionFilter滤掉
if (motion_filter_.IsSimilar(time, pose_estimate)) {
return nullptr;
}
// 调用submap的工具函数将传感器数据插入,更新Submap。
std::vector<std::shared_ptr<const Submap2D>> insertion_submaps =
active_submaps_.InsertRangeData(range_data_in_local);
// 返回插入结果
return absl::make_unique<InsertionResult>(InsertionResult{
std::make_shared<const TrajectoryNode::Data>(TrajectoryNode::Data{
time,
gravity_alignment,
filtered_gravity_aligned_point_cloud,
{}, // 'high_resolution_point_cloud' is only used in 3D.
{}, // 'low_resolution_point_cloud' is only used in 3D.
{}, // 'rotational_scan_matcher_histogram' is only used in 3D.
pose_estimate}),
std::move(insertion_submaps)});
}