
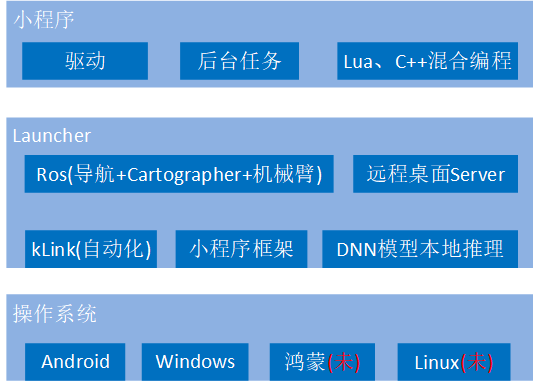
上海兰栖科技专注于提供可编程智能设备/机器人软件解决方案。蔷薇是个单App(机器人端)、跨平台、开源系统架构,包括两个App。
- Launcher(OS:Android、Win10)。安装在智能设备/机器人。主要模块:Ros(基础+导航+Cartographer+机械臂)、kLink(自动化)、远程桌面Server,小程序容器,DNN模型本地推理,Mediapipe。
- kDesktop(OS:Android、iOS、Win10)。安装在控制端,像手机、平板、电脑。主要模块:远程桌面Client,小程序容器,DNN模型本地推理。
源码、App下载: Launcher+kDesktop
联系我们:网站内私信“兰栖科技”,邮箱:service@leagor.com。公司招聘兼职销售,有兴趣可联系。
一、AI台灯/AI玩偶
赋与传统台灯/玩偶AI功能。AI台灯-玩偶方案.pdf
视频1:把传统玩偶升级成AI玩偶
视频2:使用指南
对玩偶,拥有除照外全部功能。
视频3:把传统台灯升级成AI台灯
视频4:(Win10)安装并运行Launcher
为熟悉产品操作,可用这Windows版app,找台Win10/Win11电脑安装就行。虽然最后台灯/玩偶用是Android,但怎么操作,两者是一样的。
ps:如果工作需要久坐,又有电脑,可安装下这软件,看坐姿检测功能能否改善您的肩、颈、腰。
二、室内可编程器人
更详细说明参考“蔷薇:单App、开源机器人系统架构”或下文那个同名视频。pdf下载:室内可编程机器人.pdf。
机器人硬件
兰栖科技不做硬件,有硬件购买的,是直接转给硬件制造商。
购买整机:室内可编程机器人(京东)、室内可编程机器人(淘宝)。如果已有一定机器人基础,也可购买零件自已拼装。以下是Basic小程序支持的硬件。
- 主板:ROC-RK3588S-PC、鲁班猫4
- 激光雷达:N10(镭神技术)、RPLIDAR A1M8(思岚科技)
- 底盘(底座+电机+驱动板):WheelTec(东莞轮趣科技),ROS小车机器人(深圳小R 科技)
- 机械臂:WheelTec(东莞轮趣科技)
- 深度相机:DaBai DCL(奥比中光)
- IMU(支持每隔100毫秒输出欧拉角-Z):IM600(中山辰翼电子科技)
- 智能家居(传感器):WIFI门铃、WIFI门磁、WIFI烟雾(刻锐智能)
以上是内置支持的零件,要使用其它零件需自写驱动融入系统。
视频1:蔷薇:单App、开源机器人系统架构
视频2:(鲁班猫4)建图、导航、门铃按下执行任务、语音命令、蓝牙
要看更多关视频可去Bilibili的“兰栖科技”。