
本文有部分转自“(02)Cartographer源码无死角解析-(44) 2D栅格地图→ProbabilityGrid 与 ProbabilityToLogOddsInteger()”。
在CreateOccupancyGridMsg,存在个我无法理解的地方。当不是未知栅格时,是用以下公式计算栅格值。
value = cartographer::common::RoundToInt((1. - color / 255.) * 100.);color越大,value越小。如果color对应intensity,意味着color越大,栅格占用的概率越大;反映到nav_msgs::OccupancyGrid,栅格占用的概率value越小。
从后面导航使用可知,nav_msgs::OccupancyGrid中,当栅格值不是-1时,是栅格值越大,占用的概率越大,那这结果岂不是和上面这个结论相反?
CorrespondenceCostValue到OccupancyGrid的[-1, 100],可认为经过三个阶段。
- [ProbabilityGrid::DrawToSubmapTexture]CorrespondenceCostValue分解出两分量:value、alpha。
- [DrawTexture]从(value、alpha)到(alpha、intensity、observed)。intensity就是value,就是换了变量名。DrawTexture并没有数值上有过改变,只是多出一个分量observed,专门表示是否有观测到过hit或miss,如果等于0,即没观测过,那就是未知。
- [CreateOccupancyGridMsg]从(alpha、intensity、observed)到一字节的值。生成时只须要(intensity、observed)。
概率栅格图(ProbabilityGrid)中“点云画到概率图”写过个结论:只要在ProbabilityGridRangeDataInserter2D::Insert后,栅格值范围就限制在了[0, kUpdateMarker-1]。于是可知道,在同线程、LocalTrajectoryBuilder2D::AddRangeData函数外的,可认为概率图中栅格值范围限制在[0, kUpdateMarker-1]。而在后面cartographer_occupancy_grid_node结点发布的栅格图可知道,那里的栅格值范围是[-1, 100],那这两范围是怎么转换的。
一、cartographer_node节点的Node::HandleSubmapQuery
要没意外,使用cartographer须至少运行两个节点:cartographer_node、cartographer_occupancy_grid。
cartographer_occupancy_grid节点会订阅“submap_list”话题。在处理收到一个“submap_list”话题时,对应调用Node::HandleSubmapList(const cartographer_ros_msgs::SubmapList::ConstPtr& msg),主要任务是根据子图列表生成submap_slices_。对得到参数msg,写着当前所有子图。考虑到效率,这些子图只写着关键信息,像{trajectory_id, submap_index},不包括需较多内存的栅格数据。cartographer_occupancy_grid接下要得到该子图栅格数据时,需要以{trajectory_id, submap_index}为参数,发出“submap_query”action请求。
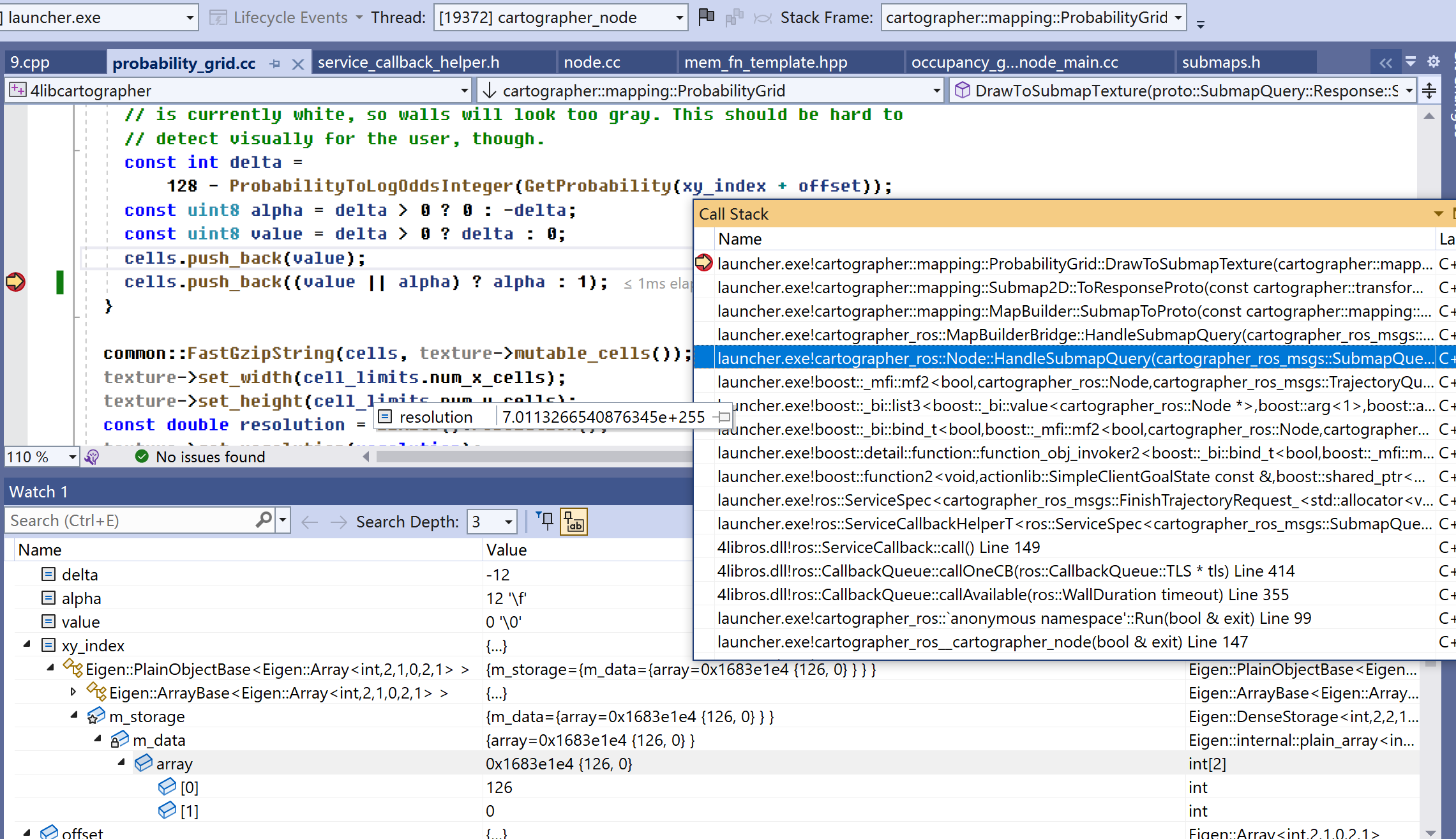
另一方面,是cartographer_node节点在处理“submap_query”action请求,处理函数是图1中“Call Stack”高亮的Node::HandleSubmapQuery。图1可看到Node::HandleSubmapQuery是运行在cartographer_node节点主线程,这也是运行LocalTrajectoryBuilder2D::AddRangeData的线程。既然同一线程,就不必担心概率图中栅格数据读、写同步。而且可以确定,Node::HandleSubmapQuery看到的概率图中栅格值范围已限制在[0, kUpdateMarker-1]。
接下就从ProbabilityGrid::DrawToSubmapTexture开始让看这范围变换。
1.1 ProbabilityGrid::DrawToSubmapTexture()
DrawToSubmapTexture会以着std::string存储栅格数据,源码中创建了变量std::string cells。其中每2字节描述一个cell:
- 第一个字节:栅格值value。0 <= value <=127,越接近127,表示栅格占用的概率越大。
- 第二个字节:alpha透明度。0 <= alpha <=127,越接近127,表示栅格空闲的概率越大。
- value和alpha都是0时,表示该cell是未知。
生成的cells放在texture->cells_字段。
// 获取压缩后的地图栅格数据
bool ProbabilityGrid::DrawToSubmapTexture(
proto::SubmapQuery::Response::SubmapTexture* const texture,
transform::Rigid3d local_pose) const {
Eigen::Array2i offset;
CellLimits cell_limits;
// 根据bounding_box对栅格地图进行裁剪
ComputeCroppedLimits(&offset, &cell_limits);
std::string cells;
调用父类 ComputeCroppedLimits(&offset, &cell_limits) 函数,对栅格地图进行剪裁。创建一个 std::string 对象 cells。然后对剪切之后地图所有cell进行遍历。
for (const Eigen::Array2i& xy_index : XYIndexRangeIterator(cell_limits)) {
if (!IsKnown(xy_index + offset)) {
cells.push_back(0 /* unknown log odds value */);
cells.push_back(0 /* alpha */);此个栅格状态是kUnknownCorrespondenceValue,也就是说,一直到现既没有观测到过hit,也没有miss。把该 cell 的两个字节都设置为0,表示未知。
continue; } // We would like to add 'delta' but this is not possible using a value and // alpha. We use premultiplied alpha, so when 'delta' is positive we can // add it by setting 'alpha' to zero. If it is negative, we set 'value' to // zero, and use 'alpha' to subtract. This is only correct when the pixel // is currently white, so walls will look too gray. This should be hard to // detect visually for the user, though. // 我们想添加 'delta',但使用值和 alpha 是不可能的 // 我们使用预乘 alpha,因此当 'delta' 为正时,我们可以通过将 'alpha' 设置为零来添加它。 // 如果它是负数,我们将 'value' 设置为零,并使用 'alpha' 进行减法。 这仅在像素当前为白色时才正确,因此墙壁看起来太灰。 // 但是,这对于用户来说应该很难在视觉上检测到。 // delta处于[-127, 127] const int delta = 128 - ProbabilityToLogOddsInteger(GetProbability(xy_index + offset));
此个栅格至少观测到过一次hit或miss,那么首先获取该cell被占用的概率值,通过 ProbabilityToLogOddsInteger() 函数把其映射到 [1, 255] 之间,然后再映射到[-127, 127],使用变量 delta 表示。关于 ProbabilityToLogOddsInteger() 函数后面单独分析。
const uint8 alpha = delta > 0 ? 0 : -delta; const uint8 value = delta > 0 ? delta : 0; // 存数据时存了2个值, 一个是栅格值value, 另一个是alpha透明度 cells.push_back(value); cells.push_back((value || alpha) ? alpha : 1);
delta的范围在[-127, 127]之间。
- delta > 0时,越接近127,表示 cell占用的概率越大。alpha = 0,value = delta
- delta < 0时,越接近-127,表示 cell空闲的概率越大。alpha = -delta,value = 0。
- delta == 0时,alpha=1,value=0。两个const时的赋值是alpha=0,但在push_back时会把alpha改为1。
只要额过观测值,不论alpha还是value,它们总是>=0,即不会出现负数。而且总是一个0,一个非0,又不可能同是0。正如上面“!IsKnown”滤掉的,如果alpha、value都是0,那是表示该栅格未知。
value越接近127,表示 cell占用的概率越大。
alpha越接近127,表示 cell空闲的概率越大。
} // 保存地图栅格数据时进行压缩 common::FastGzipString(cells, texture->mutable_cells());
把所有cell的栅格信息以 value 与 alpha 的形式存储到 std::string cells 之后,会调用 common::FastGzipString 对栅格地图数据进行压缩,压缩结果存储于 texture 之中。
// 填充地图描述信息 texture->set_width(cell_limits.num_x_cells); texture->set_height(cell_limits.num_y_cells); const double resolution = limits().resolution(); texture->set_resolution(resolution); const double max_x = limits().max().x() - resolution * offset.y(); const double max_y = limits().max().y() - resolution * offset.x(); *texture->mutable_slice_pose() = transform::ToProto( local_pose.inverse() * transform::Rigid3d::Translation(Eigen::Vector3d(max_x, max_y, 0.)));
填充地图信息,如宽高cell数,分辨率等等最后调用了 *texture->mutable_slice_pose() 函数进行赋值,这里没有看明白,先记一下。
return true; }
2.1 ProbabilityToLogOddsInteger()
现在呢,我们回过头来看一下 ProbabilityGrid::DrawToSubmapTexture() 中调用的 ProbabilityToLogOddsInteger() 函数,该函数实现于 src/cartographer/cartographer/mapping/submaps.h 文件中,其主要原理可以阅读 Cartographer 论文:“Real-Time Loop Closure in 2D LIDAR SLAM”。
// Converts the given probability to log odds.
// 对论文里的 odds(p)函数 又取了 log
inline float Logit(float probability) {
return std::log(probability / (1.f - probability));
}
const float kMaxLogOdds = Logit(kMaxProbability);
const float kMinLogOdds = Logit(kMinProbability);
// Converts a probability to a log odds integer. 0 means unknown, [kMinLogOdds,
// kMaxLogOdds] is mapped to [1, 255].
inline uint8 ProbabilityToLogOddsInteger(const float probability) {
const int value = common::RoundToInt((Logit(probability) - kMinLogOdds) *
254.f / (kMaxLogOdds - kMinLogOdds)) +
1;
CHECK_LE(1, value);
CHECK_GE(255, value);
return value;
}首先来看 Logit 这个函数,对std::log内中参数,,这个公式和probability_values.h中的“float Odds(float probability)”一模一样。的确,两处
有着一样的物理意义。
这个odds表示occupied概率与free概率的比值,这里抄下“probability_values.h/c:占据概率相关”对odds的解释。
- Odd(s)值等于1时,表征一半对一半,该点被occupied和free的概率各为0.5。
- 如果Odd(s)值大于1,表征该点被occupied的概率更大;Odd(s)越大,occupied的概率越大。范围为1~
- 如果Odd(s)值小于1,表征该点free的概率更大;Odd(s)越小,free的概率越大。范围为0~1。
odds范围是0~,把std::log(odds)值记为
,log函数(e为底) 的性质,
范围是
~
。
很显然,直接使用是不合适的,因为其区间为
。论文中使用了一个巧妙的办法,那就 probability 最大值为0.9,那么未被占用的概率最小为0.1,现在回过头来看 probability_values.h 文件中定义的如下变量:
constexpr float kMinProbability = 0.1f; // 0.1 constexpr float kMaxProbability = 1.f - kMinProbability; // 0.9 constexpr float kMinCorrespondenceCost = 1.f - kMaxProbability; // 0.1 constexpr float kMaxCorrespondenceCost = 1.f - kMinProbability; // 0.9
就比较好理解了,ProbabilityToLogOddsInteger()函数由于输入 probability 只能在 [01, 0.9] 之间取值,所以可以把夹紧到区间 [kMinLogOdds, kMaxLogOdds]。最后再把区间映射到 [1, 255] 区间上。这样就达到了 ProbabilityToLogOddsInteger() 函数的最终目的。
二、cartographer_occupancy_grid节点的Node::HandleSubmapList
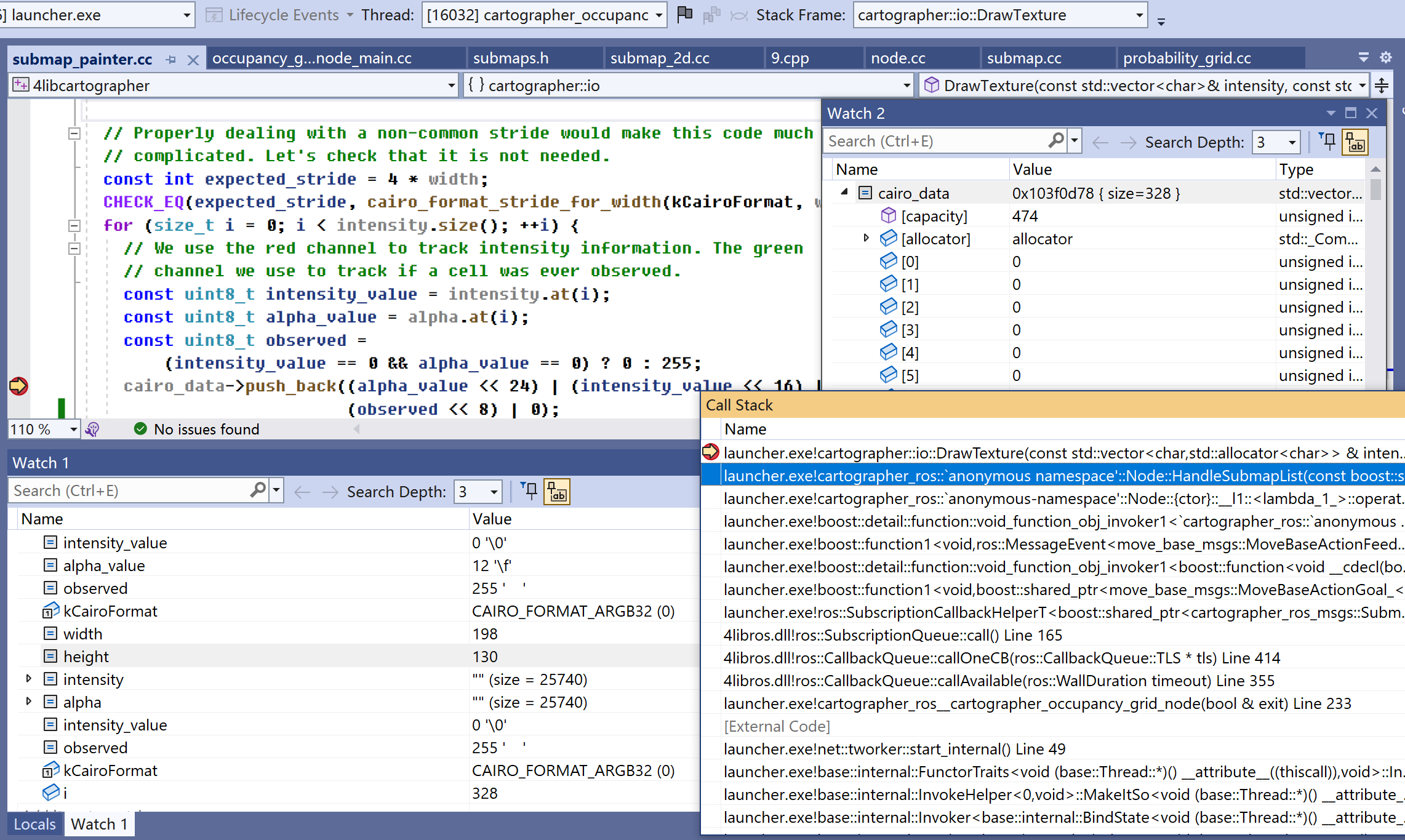
上面有说到,cartographer_occupancy_grid节点会订阅“submap_list”话题。在处理收到一个“submap_list”话题时,对应调用Node::HandleSubmapList(const cartographer_ros_msgs::SubmapList::ConstPtr& msg)。图2中“Call Stack”高亮的Node::HandleSubmapList显示了调用情况。
2.1 Node::HandleSubmapList
HandleSubmapList负责根据子图列表(msg)生成submap_slices_,处理后,submap_slices_已将概率图转成cario图面,但没有将子图拼成大地图。处理过程中,“submap_list”给出了子图索引、绝对位姿、概率图版本,但没有该子图概率图(栅格数据)。一旦没有得到过该子图的概率图或概率图版本发生变化,会以子图索引为参数调用“submap_query”服务获得概率图。
<cartographer_ros>/cartographer_ros/occupancy_grid_node_main.cc
------
void Node::HandleSubmapList(
const cartographer_ros_msgs::SubmapList::ConstPtr& msg) {
absl::MutexLock locker(&mutex_);
// We do not do any work if nobody listens.
if (occupancy_grid_publisher_.getNumSubscribers() == 0) {
return;
}
// Keep track of submap IDs that don't appear in the message anymore.
std::set<SubmapId> submap_ids_to_delete;
for (const auto& pair : submap_slices_) {
submap_ids_to_delete.insert(pair.first);
}经过HandleSubmapList后,submap_slices_数的子图情况必须msg->submap的保持一致。一旦这子图是在msg->submap中的,那它会从submap_ids_to_delete中栅除。一旦循环完整个msg->submap,依旧留在submap_ids_to_delete中的,那就是之前有、但现在没有了的子图,需要删除。
for (const auto& submap_msg : msg->submap) {
const SubmapId id{submap_msg.trajectory_id, submap_msg.submap_index};
submap_ids_to_delete.erase(id);
if ((submap_msg.is_frozen && !FLAGS_include_frozen_submaps) ||
(!submap_msg.is_frozen && !FLAGS_include_unfrozen_submaps)) {
continue;
}
SubmapSlice& submap_slice = submap_slices_[id];
submap_slice.pose = ToRigid3d(submap_msg.pose);
submap_slice.metadata_version = submap_msg.submap_version;
if (submap_slice.surface != nullptr &&
submap_slice.version == submap_msg.submap_version) {
continue;
}
auto fetched_textures =
::cartographer_ros::FetchSubmapTextures(id, &client_);这个标识id的子图,它或没在之前的submap_slices_,或发生版本变换了,需以子图索引为参数调用“submap_query”服务获得该详细数据。
FetchSubmapTextures得到“submap_query”应答后,会将std::string类型cells解压缩,对应恢复出values、alphas数组,不过它把value变量名改成了intensity。
if (fetched_textures == nullptr) {
continue;
}
CHECK(!fetched_textures->textures.empty());
submap_slice.version = fetched_textures->version;
// We use the first texture only. By convention this is the highest
// resolution texture and that is the one we want to use to construct the
// map for ROS.
const auto fetched_texture = fetched_textures->textures.begin();
submap_slice.width = fetched_texture->width;
submap_slice.height = fetched_texture->height;
submap_slice.slice_pose = fetched_texture->slice_pose;
submap_slice.resolution = fetched_texture->resolution;
submap_slice.cairo_data.clear();
submap_slice.surface = ::cartographer::io::DrawTexture(
fetched_texture->pixels.intensity, fetched_texture->pixels.alpha,
fetched_texture->width, fetched_texture->height,
&submap_slice.cairo_data);fetched_texture->pixels.intensity、fetched_texture->pixels.alpha分别对应着DrawToSubmapTexture中的value、alpha数组。见图2,数组长度都是“fetched_texture->width*fetched_texture->height”。经过DrawTexture,栅格值表示成三个部分:intensity、alpha、observed,然后每个部以1字节封装成一个uint32_t。
}
// Delete all submaps that didn't appear in the message.
for (const auto& id : submap_ids_to_delete) {
submap_slices_.erase(id);循环完整个msg->submap后,依旧留在submap_ids_to_delete中的,那就是之前有、但现在没有了的子图,需要删除。
} last_timestamp_ = msg->header.stamp; last_frame_id_ = msg->header.frame_id; }
2.2 DrawTexture
DrawTexture负责把以(intensity, alplha)对表示的栅格值转换成(intensity, alplha, observed),并以着每分量1字节封装一个uint32_t。
- [IN]intensity。value数组。长度width*height。
- [IN]alpha。alpha数组。长度width*height。
- [IN]width、height。该子图以栅格为单元尺寸。
- [OUT]cairo_data。存储生成的栅格值。
<cartographer>/cartographer/io/submap_painter.cc
------
UniqueCairoSurfacePtr DrawTexture(const std::vector<char>& intensity,
const std::vector<char>& alpha,
const int width, const int height,
std::vector<uint32_t>* const cairo_data) {
CHECK(cairo_data->empty());
// Properly dealing with a non-common stride would make this code much more
// complicated. Let's check that it is not needed.
const int expected_stride = 4 * width;
CHECK_EQ(expected_stride, cairo_format_stride_for_width(kCairoFormat, width));
for (size_t i = 0; i < intensity.size(); ++i) {
// We use the red channel to track intensity information. The green
// channel we use to track if a cell was ever observed.
const uint8_t intensity_value = intensity.at(i);
const uint8_t alpha_value = alpha.at(i);
const uint8_t observed =
(intensity_value == 0 && alpha_value == 0) ? 0 : 255;
cairo_data->push_back((alpha_value << 24) | (intensity_value << 16) |
(observed << 8) | 0);- b31..b24:alpha,DrawToSubmapTexture中的value。0 <= alpha <=127,越接近127,表示栅格空闲的概率越大。
- b23..b16:intensity。0 <= value <=127,越接近127,表示栅格占用的概率越大。
- b15..b8:observed。只有两种值:0、255。指示是否在该观测到过hit或miss。是255时,表示有观测到过,此时alpha、intensity至少有一个非0。是0时,表示没未观测到过,此时alpha、intensity都是0。
- b7..b0:固定0。
} auto surface = MakeUniqueCairoSurfacePtr(cairo_image_surface_create_for_data( reinterpret_cast<unsigned char*>(cairo_data->data()), kCairoFormat, width, height, expected_stride)); CHECK_EQ(cairo_surface_status(surface.get()), CAIRO_STATUS_SUCCESS) << cairo_status_to_string(cairo_surface_status(surface.get())); return surface; }
相比DrawToSubmapTexture,DrawTexture并没有数值上有过改变,只是多出一个分量observed,专门表示是否有观测到过hit或miss,如果等于0,即没观测过,那就是未知。
三、cartographer_occupancy_grid节点的Node::DrawAndPublish
cartographer_occupancy_grid节点会创建间隔publish_period_sec秒(不是lua配置,默认1秒)的定时器,处理例程Node::DrawAndPublish,用于定时发布“map”话题。
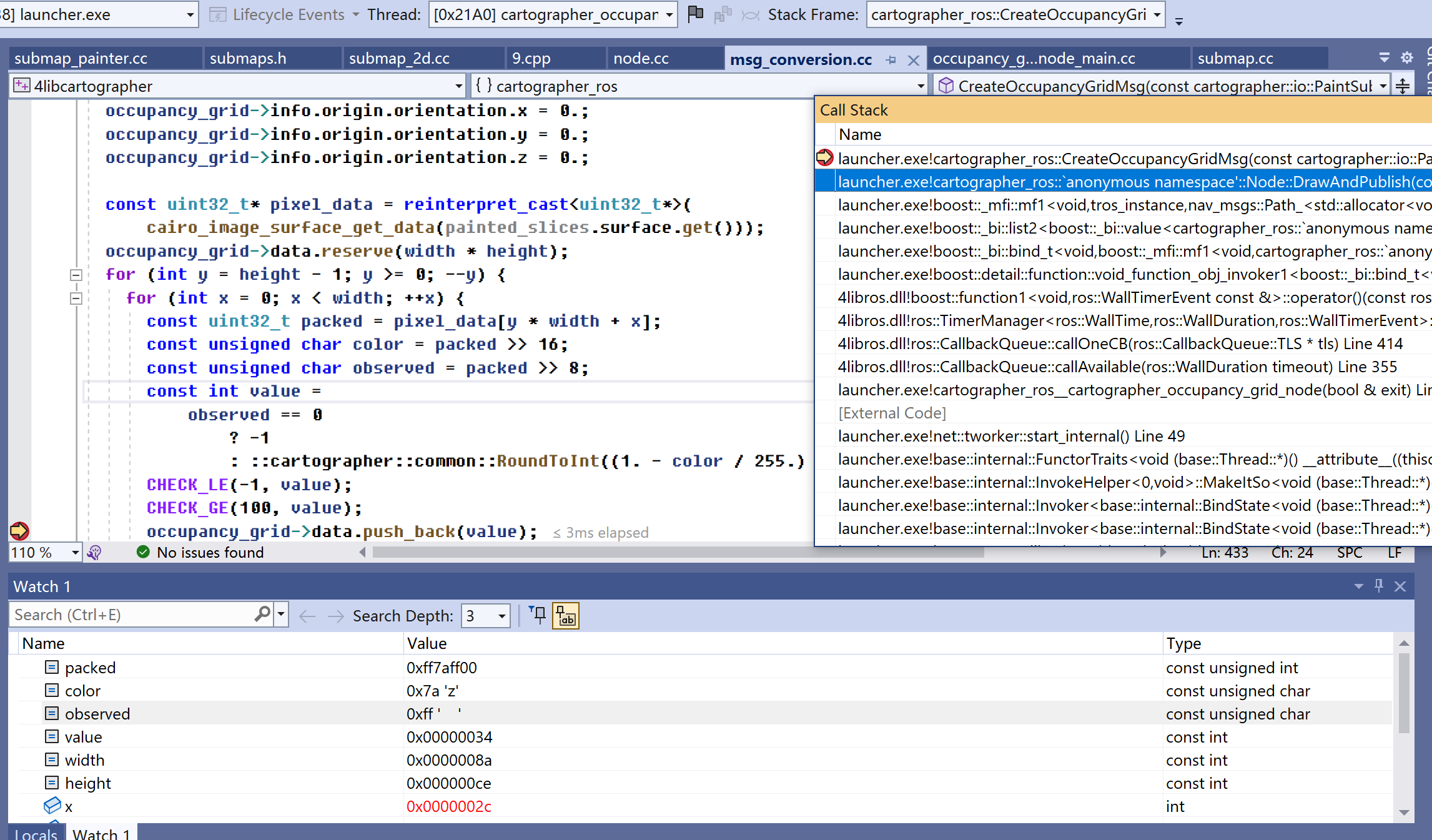
图3显示了DrawAndPublish函数栈情况。以下是它依次执行的工作。
- [PaintSubmapSlices]把submap_slices_中子图拼成大地图,结果存放在painted_slices。
- [CreateOccupancyGridMsg]把painted_slices转成msgs::OccupancyGrid,结果放在msg_ptr。
- [.publish(*msg_ptr)]基于msg_ptr发布个“map”话题。
“发布地图(map话题)”,说了第一步骤PaintSubmapSlices。针对栅格值变换,在把子图拼成大地图时,应该也会涉及到。毕竟,同一个栅格,可能会存在多个子图,那最后栅格值是什么个情况?
我不熟悉cairo库,这须要有专业人给出答案。这里就直接猜了:不会改变(intensity, alplha, observed)意义,但生成的栅格值是多子图中各值的和。——但这结论极可能是错的,因为按这理解的话,会无法理解接下会出现的用“(1. - color / 255.) * 100.”计算nav_msgs::OccupancyGrid栅格值。
3.1 CreateOccupancyGridMsg
<cartographer_ros>/cartographer_ros/cartographer_ros/msg_conversion.cc
------
std::unique_ptr<nav_msgs::OccupancyGrid> CreateOccupancyGridMsg(
const cartographer::io::PaintSubmapSlicesResult& painted_slices,
const double resolution, const std::string& frame_id,
const ros::Time& time) {
auto occupancy_grid = absl::make_unique<nav_msgs::OccupancyGrid>();
const int width = cairo_image_surface_get_width(painted_slices.surface.get());
const int height =
cairo_image_surface_get_height(painted_slices.surface.get());
...
const uint32_t* pixel_data = reinterpret_cast<uint32_t*>(
cairo_image_surface_get_data(painted_slices.surface.get()));
occupancy_grid->data.reserve(width * height);
for (int y = height - 1; y >= 0; --y) {
for (int x = 0; x < width; ++x) {
const uint32_t packed = pixel_data[y * width + x];
const unsigned char color = packed >> 16;
const unsigned char observed = packed >> 8;
const int value =
observed == 0
? -1
: ::cartographer::common::RoundToInt((1. - color / 255.) * 100.);kCairoFormat是CAIRO_FORMAT_ARGB32。一个像素占4个字节。
observed只有两种值:0、255。指示是否在该栅格观测到过hit或miss。
- 是0时,表示没观测到过。于是它等于0时,value=-1,表示该栅格未知。
- 是255时,表示有观测到过。用表示占用概率的color(intensity)来计算要放入map的栅格值。对单个子图来说,0 <= color <=127,但如果该栅格存在多个子图,那此时的color可能是超过127。但不管怎么说,此此算出的value范围是[0, 100]。
结合observed两种情况,最终算出的value范围是[-1, 100]。-1表示未知,即从没有在该栅格观测到过hit和miss。但对不是未知栅格时,用的计算栅格值公式,我无法理解,这和认为就是相反的。
CHECK_LE(-1, value); CHECK_GE(100, value); occupancy_grid->data.push_back(value); } } return occupancy_grid; }
贴完CreateOccupancyGridMsg,说下我无法理解的一个地方。当不是未知栅格时,是用以下公式计算栅格值。
value = cartographer::common::RoundToInt((1. - color / 255.) * 100.);
color越大,value越小。如果color对应intensity,意味着color越大,栅格占用的概率越大;反映到nav_msgs::OccupancyGrid,栅格占用的概率越小。
从后面导航使用可知,nav_msgs::OccupancyGrid中,当栅格值不是-1时,是栅格值越大,占用的概率越大,那这结果岂不是和上面这个结论相反?
| color | observed | value | |
| 0xff800000(0x8000) | 0x80(128) | 0x00 | -1 |
| 0xff7aff00(0x7aff) | 0x7a(122) | 0xff | 52 |
| 0xff82ff00(0x82ff) | 0x82(130) | 0xff | 49 |
nav_msgs::OccupancyGrid中栅格值范围是[-1, 100]。-1到costmap2d后是costmap_2d::NO_INFORMATION,100往往是costmap_2d::LETHAL_OBSTACLE。但栅格在一个子图中最多127,
实际使用时,栅格值往往达不到100。这样一来,如果用变量lethal_threshold依止使用默认值100的话,导航包中静态层栅格很少会在膨胀层产生膨胀。“修改cartographer源代码使其发布ros标准格式的占据栅格地图”写的是把这个上限由100改到50。